opencv 颜色识别hsv方法 C++(红色)
Posted 青杀傻瓜化
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv 颜色识别hsv方法 C++(红色)相关的知识,希望对你有一定的参考价值。
本文采用的是hsv的方式进行颜色识别,主要流程如下:
- 读取视频 :VideoCapture cap(0);
- 设置图像参数:cap.set(cv::CAP_PROP_FRAME_WIDTH, width);设置图像宽度。
- 将图像转换为HSV颜色空间:cvtColor(frame, hsv, COLOR_BGR2HSV)
- 调整hsv的范围
- 对图像进行二值化处理 inRange(hsv, lower_yellow, upper_yellow, mask);
- 对二值化后的图像进行形态学处理,去除噪点:
Mat kernel = getStructuringElement(MORPH_RECT, Size(5, 5));
morphologyEx(mask2, mask2, MORPH_OPEN, kernel);
morphologyEx(mask2, mask2, MORPH_CLOSE, kernel); - 高斯滤波:GaussianBlur(mask2, mask2, Size(3, 3), 0);
- canny算子边缘检测:Canny(mask2, mask2, 100, 250);
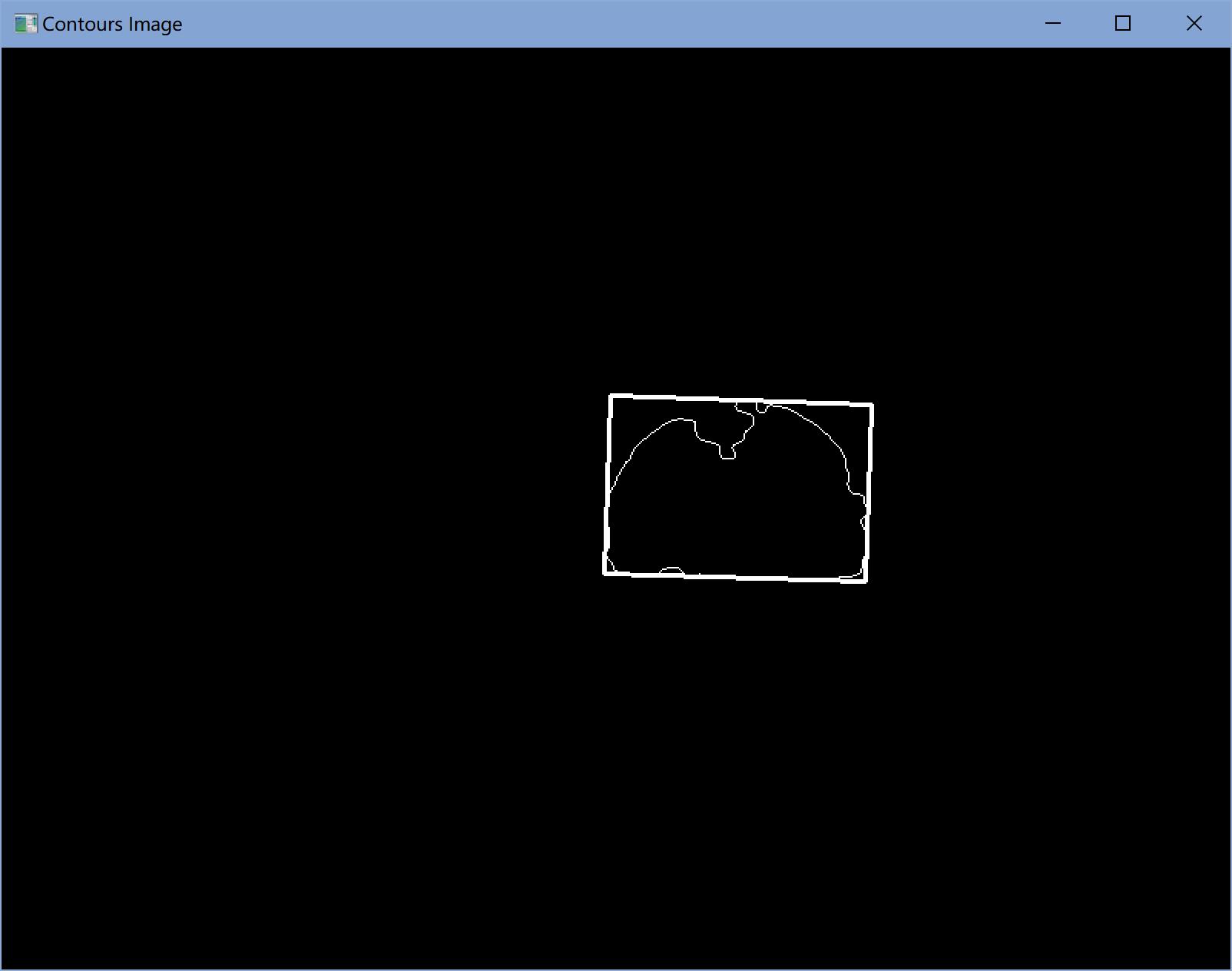
- 在二值化后的图像中寻找轮廓
- 计算轮廓的面积
- 寻找面积最大的部分
- 绘制轮廓的最小外接正矩形
#include <opencv2/imgcodecs.hpp> #include <opencv2/highgui.hpp> #include <opencv2/imgproc.hpp> #include <iostream> #include <vector> using namespace cv; using namespace std; int width = 800; // 设置图像宽度 int height = 600; // 设置图像高度 //readme 可以识别红色hsv int main() VideoCapture cap(0);//读取视频0 cap.set(cv::CAP_PROP_FRAME_WIDTH, width); // 设置图像宽度 cap.set(cv::CAP_PROP_FRAME_HEIGHT, height); // 设置图像高度 while (true) int max = 0; Mat frame; cap.read(frame); Mat hsv; cvtColor(frame, hsv, COLOR_BGR2HSV);// 将图像转换为HSV颜色空间 cv::Scalar lower_yellow(7, 94, 82); cv::Scalar upper_yellow(54, 232, 255); // 定义黄色的HSV范围 cv::Scalar lower_red(137, 144, 114); cv::Scalar upper_red(255, 241, 242); // 定义红色的HSV范围 Mat mask; Mat mask2; inRange(hsv, lower_yellow, upper_yellow, mask);// 对图像进行二值化,只保留蓝色部分 inRange(hsv, lower_red, upper_red, mask2); // 对二值化后的图像进行形态学处理,去除噪点 Mat kernel = getStructuringElement(MORPH_RECT, Size(5, 5)); morphologyEx(mask2, mask2, MORPH_OPEN, kernel); morphologyEx(mask2, mask2, MORPH_CLOSE, kernel); GaussianBlur(mask2, mask2, Size(3, 3), 0);//高斯滤波 Canny(mask2, mask2, 100, 250);//canny算子边缘检测 // 在二值化后的图像中寻找轮廓 vector<vector<Point>> contours; vector<Vec4i> hierarchy; findContours(mask2, contours, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE); Mat mask2Contours = Mat::zeros(mask2.size(), CV_8UC1); Mat Contours = Mat::zeros(mask2.size(), CV_8UC1); Mat mask2Contours0 = Mat::zeros(mask2.size(), CV_8UC1); vector<double> g_dConArea(contours.size()); for (int i = 0; i < contours.size(); i++) //contours[i]代表的是第i个轮廓,contours[i].size()代表的是第i个轮廓上所有的像素点数 for (int j = 0; j < contours[i].size(); j++) //绘制出contours向量内所有的像素点 //Point P = Point(contours[i][j].x, contours[i][j].y); //Contours.at<uchar>(P) = 255; //计算轮廓的面积 g_dConArea[i] = contourArea(contours[i]); //寻找面积最大的部分 for (int i = 1; i < contours.size(); i++) if (g_dConArea[i] > g_dConArea[max]) max = i; //Point pt1(200, 100); //Point pt2(600, 500); drawContours(mask2Contours, contours, max, Scalar(255), 1, 8, hierarchy); //绘制轮廓的最小外接正矩形 Rect boundRect = boundingRect(Mat(contours[max])); rectangle(mask2Contours0, Point(boundRect.x, boundRect.y), Point(boundRect.x + boundRect.width, boundRect.y + boundRect.height), Scalar(255), 2, 8); //中心点Point(boundRect.x+boundRect.width/2,boundRect.y+boundRect.height/2); //绘制轮廓的最小外结矩形 circle(frame, Point(boundRect.x + boundRect.width/2, boundRect.y + boundRect.height/2), 5, Scalar(255), -1); RotatedRect rect = minAreaRect(contours[max]); Point2f P[4];//初始化矩形四个顶点坐标 rect.points(P); for (int j = 0; j <= 3; j++) line(mask2Contours, P[j], P[(j + 1) % 4], Scalar(255), 2); line(frame, P[j], P[(j + 1) % 4], Scalar(255), 2); if (waitKey(1) == \'q\') break; imshow("hsv", hsv); imshow("mask", mask); imshow("mask2", mask2); /*imshow("contours", contours);*/ imshow("Color Detection", frame); imshow("最小正外接矩形", mask2Contours0); imshow("Contours Image", mask2Contours); //轮廓 //imshow("Point of Contours", Contours); //向量contours内保存的所有轮廓点集 // 释放摄像头资源和所有窗口 cap.release(); destroyAllWindows(); return 0;
写的垃圾,大佬多多指教。
- 效果图1:
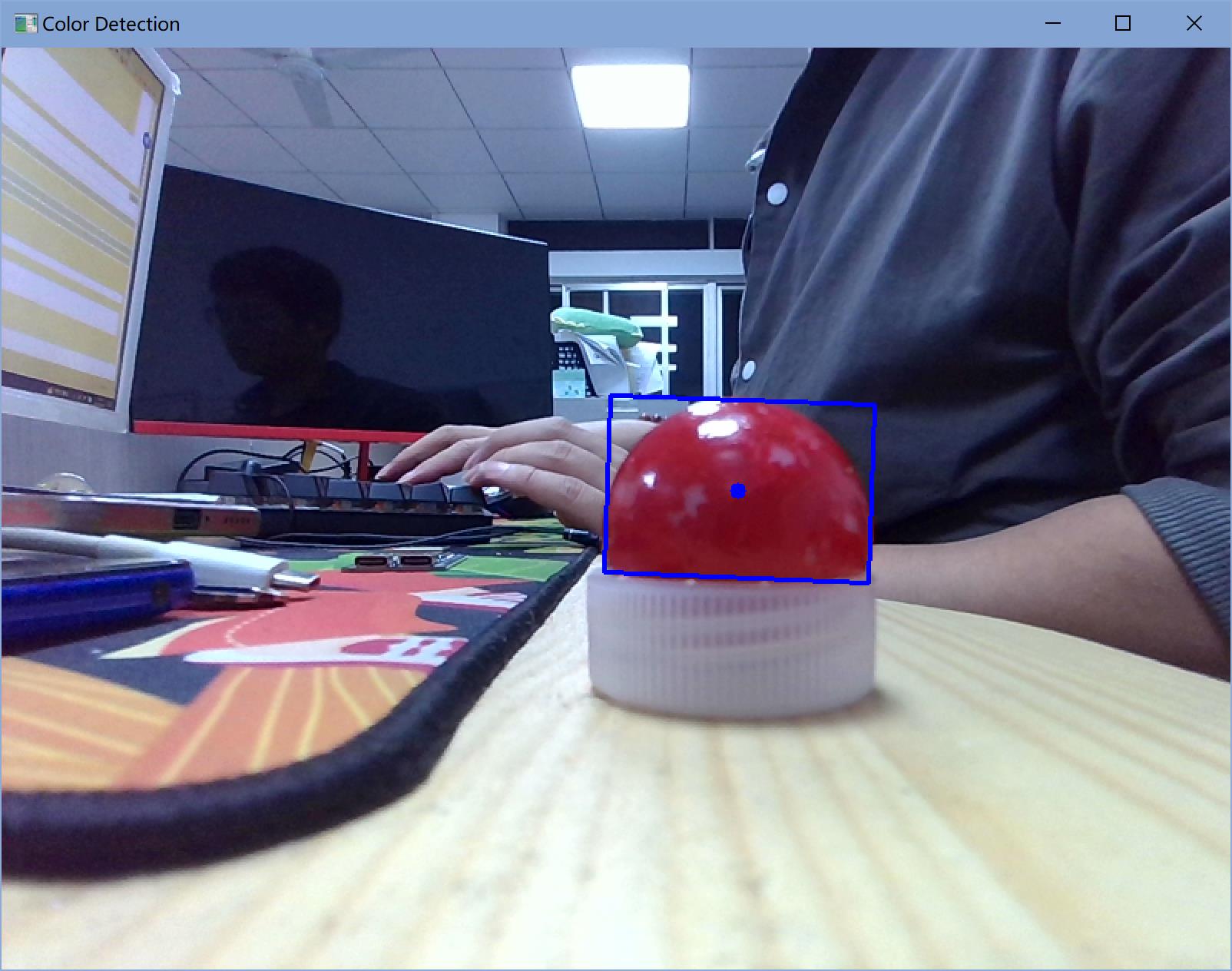
-
颜色随便提取的(大家也可以尝试用提取通道的方法)
以上是关于opencv 颜色识别hsv方法 C++(红色)的主要内容,如果未能解决你的问题,请参考以下文章