用邻接表表示图的广度优先搜索时的存储结构,通常采用()结构来实现算法
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了用邻接表表示图的广度优先搜索时的存储结构,通常采用()结构来实现算法相关的知识,希望对你有一定的参考价值。
A 栈 B队列 C树 D图
B。
广度优先搜索相当于层次遍历,深度优先搜索相当于先序优先遍历,所以答案选择B。
邻接表表示的图的广度优先搜索一般采用队列结构来实现算法:
首先选择一个起始节点,把它的临界表中节点加入到队列中,每次取出队首元素,然后把该元素的邻接表中的节点加入到队列末尾,标记已遍历过的节点,直到队列中没有节点为止,一般栈用于深度优先搜索,队列用于广度优先搜索。

扩展资料:
深度优先搜索用一个数组存放产生的所有状态。
(1) 把初始状态放入数组中,设为当前状态;
(2) 扩展当前的状态,产生一个新的状态放入数组中,同时把新产生的状态设为当前状态;
(3) 判断当前状态是否和前面的重复,如果重复则回到上一个状态,产生它的另一状态;
(4) 判断当前状态是否为目标状态,如果是目标,则找到一个解答,结束算法。
参考资料来源:百度百科-深度优先搜索
参考技术AB。
广度优先搜索相当于层次遍历,深度优先搜索相当于先序优先遍历,所以答案选择B。
邻接表表示的图的广度优先搜索一般采用队列结构来实现算法:
首先选择一个起始节点,把它的临界表中节点加入到队列中,每次取出队首元素,然后把该元素的邻接表中的节点加入到队列末尾,标记已遍历过的节点,直到队列中没有节点为止,一般栈用于深度优先搜索,队列用于广度优先搜索。

扩展资料:
所有的搜索算法从其最终的算法实现上来看,都可以划分成两个部分,控制结构和产生系统。正如前面所说的,搜索算法简而言之就是穷举所有可能情况并找到合适的答案,所以最基本的问题就是罗列出所有可能的情况,这其实就是一种产生式系统。
我们将所要解答的问题划分成若干个阶段或者步骤,当一个阶段计算完毕,下面往往有多种可选选择,所有的选择共同组成了问题的解空间,对搜索算法而言,将所有的阶段或步骤画出来就类似是树的结构。
从根开始计算,到找到位于某个节点的解,回溯法(深度优先搜索)作为最基本的搜索算法,其采用了一种“一只向下走,走不通就掉头”的思想(体会“回溯”二字),相当于采用了先根遍历的方法来构造搜索树。
参考资料来源:百度百科-深度优先搜索
参考技术BB
广度优先搜索使用队列(queue)来实现,整个过程也可以看做一个倒立的树形:
1、把根节点放到队列的末尾。
2、每次从队列的头部取出一个元素,查看这个元素所有的下一级元素,把它们放到队列的末尾。并把这个元素记为它下一级元素的前驱。
3、找到所要找的元素时结束程序。
4、如果遍历整个树还没有找到,结束程序。

扩展资料
队列的基本运算
1、初始化队列:Init_Queue(q),初始条件:队q不存在。操作结果:构造了一个空队;
2、入队操作:In_Queue(q,x),初始条件:队q存在。操作结果:对已存在的队列q,插入一个元素x到队尾,队发生变化;
3、出队操作:Out_Queue(q,x),初始条件:队q存在且非空,操作结果:删除队首元素,并返回其值,队发生变化;
4、读队头元素:Front_Queue(q,x),初始条件:队q存在且非空,操作结果:读队头元素,并返回其值,队不变;
5、判队空操作:Empty_Queue(q),初始条件:队q存在,操作结果:若q为空队则返回为1,否则返回为0。
参考资料来源:百度百科——宽度优先搜索
参考资料来源:百度百科——队列
参考技术C B邻接表表示的图的广度优先搜索一般采用队列结构来实现算法:
首先选择一个起始节点,把它的临界表中节点加入到队列中,每次取出队首元素,然后把该元素的邻接表中的节点加入到队列末尾,标记已遍历过的节点,直到队列中没有节点为止
一般栈用于深度优先搜索,队列用于广度优先搜索本回答被提问者和网友采纳 参考技术D 广度优先搜索相当于层次遍历,深度优先搜索相当于先序优先遍历
所以答案选择B
图的搜索算法之广度优先搜索
图的邻接表表示
对图(有向或无向)
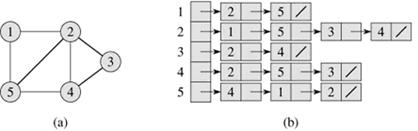
无向图的邻接表表示
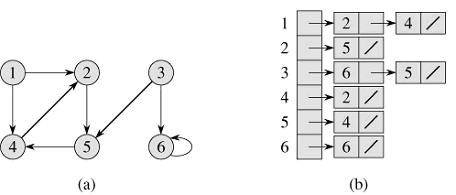
有向图的邻接表表示
广度优先搜索(Broad First Search)
1.问题的理解与描写叙述
给定一个图(有向或无向)
输入:图
输出:G的广度优先树
2 算法的伪代码描写叙述
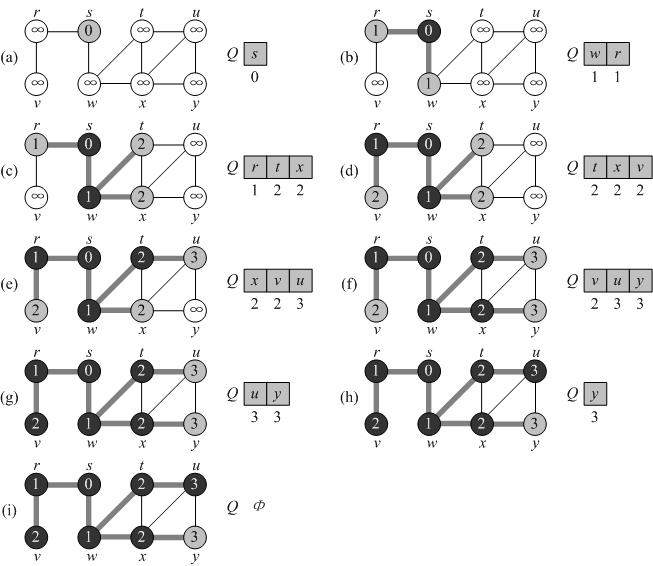
为了跟踪整个过程,广度优先搜索为每一个顶点着白色。灰色或黑色。開始时,全部的顶点都着白色,然后可能白城灰色后再为黑色。一个顶点在探索过程中首次被遇到称为发现,此后他就不再是白色了。所以灰色的或黑色的是已 发现的。广度优先搜索用两者的差别来保证搜索进程以广度优先的方式进行,若(u,v)∈E且顶点u是黑色的,则顶点v非灰即黑,即与黑色顶点相邻的顶点必是已訪问过的。
灰色顶点可能有白色相邻顶点,他们表示已訪问过或未訪问过的界限。
过程BFS假定输入的图G是用邻接表表示的。每一个顶点u∈V的颜色存储在color[u]中,为计算图G的广度优先树
伪代码例如以下:
BFS(G,s)
1 for 每一个顶点 u?V[G] - {s}
2 do color[u]←WHITE
3 d[u]←?
4 ?[u] ←NIL
5 color[s] ←GRAY
6 d[s]←0
7 Q←?
8 ENQUEUE(Q,s)
9 while Q≠?
10 do u←DEQUEUE(Q)
11 for each v ?Adj[u]
12 do if color[v] = WHITE
13 then color[v]←GRAY
14 ?[v] ←u
15 d[v]←d[u] + 1
16 ENQUEUE(Q,v)
17 color[u]←BLACK
18 return ? and d
例如以下图是BFS对一个无向图的操作过程:
算法的执行时间:Θ(V + E)
3 算法的c++实现
/***********************************
*@file:graph.h
*@ brif:图的邻接表的算法实现类
*@ author:sf
*@data:20150704
*@version 1.0
*
************************************/
#ifndef _GRAPH_H
#define _GRAPH_H
#include <list>
using namespace std;
struct vertex//邻接表节点结构
{
double weight;//边的权值
int index;//邻接顶点
};
class Graph
{
public:
list<vertex> *adj;//邻接表数组
int n;//顶点个数
Graph(float *a,int n);
~Graph();
};
#endif // _GRAPH_H#include "stdafx.h"
#include "Graph.h"
Graph::Graph(float *a,int n):n(n)//a是图的邻接矩阵
{
adj = new list<vertex>[n];
for (int i = 0; i < n;i++)//对每一个顶点i
for (int j = 0; j < n;j++)
if (a[i*n+j]!=0.0)
{
vertex node = { a[i*n + j], j };//a[i,j]=weight 边的权重 j,邻接节点号
adj[i].push_back(node);
}
}
Graph::~Graph()
{
delete[] adj;
adj = NULL;
}#ifndef _BFS_H
#define _BFS_H
/***********************************
*@file:BFS.h
*@ brif:图的邻接表的图的广度优先搜索(Broad First Search, BFS)算法实现
*@ author:sf
*@data:20150704
*@version 1.0
*
************************************/
#include "Graph.h"
#include "vector"
#include <utility>
using namespace std;
/***********************************
*@function:bfs
*@ brif:图的邻接表的图的广度优先搜索(Broad First Search, BFS)算法实现
*@ input param: g 图的邻接表 s 源顶点
*@ output param: pi g的广度优先树 d 从根节点到各顶点的距离
*@ author:sf
*@data:20150707
*@version 1.0
*
************************************/
pair<vector<int>, vector<int>> bfs(const Graph &g, int s);
/***********************************
*@function: printPath
*@ brif:打印广度优先树
*@ input param: pi 图的广度优先树 s 源顶点 v 叶子v
*@ author:sf
*@data:20150707
*@version 1.0
*
************************************/
void printPath(const vector<int> &pi, int s, int v);
#endif/***********************************
*@file:BFS.cpp
*@ brif:图的邻接表的图的广度优先搜索(Broad First Search, BFS)算法实现
*@ author:sf
*@data:20150704
*@version 1.0
*
************************************/
#include "stdafx.h"
#include "BFS.h"
#include <queue>
#include <iostream>
using namespace std;
enum vertex_color{WHITE,GRAY,BLACK};
typedef enum vertex_color Color;
pair<vector<int>, vector<int>> bfs(const Graph &g, int s)
{
queue<int> Q;//优先队列管理灰色顶点集合
vector<int> pi(g.n, -1);//顶点u在g中的父节点
vector<int> d(g.n, INT_MAX);//s到u的距离
vector<Color> color(g.n, WHITE);//每一个顶点的颜色存储在color中
int u, v;//父节点,子节点
d[s] = 0;
color[s] = GRAY;
Q.push(s);
while (!Q.empty())
{
u = Q.front();
Q.pop();
list<vertex> q = g.adj[u];
auto pq = q.begin();
while (pq!=q.end())
{
v = pq->index;
if (color[v] == WHITE)
{
color[v] = GRAY;
d[v] = d[u] + 1;
pi[v] = u;
Q.push(v);
}
pq++;
}
color[u] = BLACK;
}
return make_pair(pi, d);
}
void printPath(const vector<int> &pi, int s, int v)
{
if (v == s)
{
cout << s;
return;
}
if (pi[v] == -1)
cout << "no path from" << s << "to" << v << endl;
else
{
printPath(pi, s, pi[v]);
cout << v;
}
}// bfs_test.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "BFS.h"
#include <iostream>
using namespace std;
int _tmain(int argc, _TCHAR* argv[])
{
int s = 1, n = 8;
pair<vector<int>, vector<int>> r;
float a[] =
{
0, 1, 0, 0, 1, 0, 0, 0,
1, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 1, 0, 1, 1, 0,
0, 0, 1, 0, 0, 0, 1, 1,
1, 0, 0, 0, 0, 0, 0, 0,
0, 1, 1, 0, 0, 0, 1, 0,
0, 0, 1, 1, 0, 1, 0, 1,
0, 0, 0, 1, 0, 0, 1, 0
};
Graph g(a, 8);
r = bfs(g, 1);
vector<int> pi = r.first;
vector<int> d = r.second;
for (int i = 0; i < n; ++i)
{
if (i != s)
{
printPath(pi, s, i);
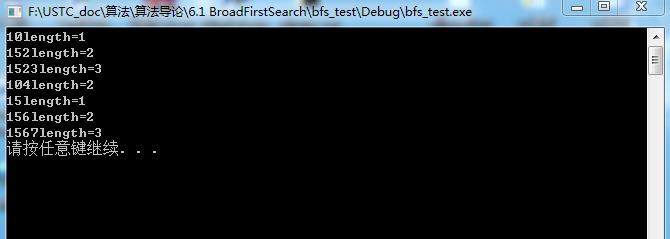
cout << "length=" << d[i] << endl;
}
}
system("pause");
return (EXIT_SUCCESS);
}执行结果:
以上是关于用邻接表表示图的广度优先搜索时的存储结构,通常采用()结构来实现算法的主要内容,如果未能解决你的问题,请参考以下文章