OpenCV 例程200篇91. 高斯噪声瑞利噪声爱尔兰噪声
Posted YouCans
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV 例程200篇91. 高斯噪声瑞利噪声爱尔兰噪声相关的知识,希望对你有一定的参考价值。
【OpenCV 例程200篇】 系列,持续更新中…
【OpenCV 例程200篇 总目录-202205更新】
【OpenCV 例程200篇】91. 高斯噪声、瑞利噪声、爱尔兰噪声
2. 噪声模型
数字图像中的噪声源主要来自图像获取和传输过程。在获取图像时,光照水平和传感器温度影响图像中的噪声。在传输图像时,传输信道中的干扰对图像产生污染。
2.1 高斯噪声(Gauss Noise)
高斯噪声中空间域和频率域中都很方便进行数学处理,因而得到了广泛的应用。
高斯噪声的概率密度函数为:
p
(
z
)
=
1
2
π
σ
e
−
(
z
−
z
ˉ
)
2
/
2
σ
2
p(z) = \\frac1\\sqrt2\\pi \\sigma e^-(z-\\barz)^2/2\\sigma ^2
p(z)=2πσ1e−(z−zˉ)2/2σ2
高斯噪声的均值为 z ˉ \\barz zˉ,标准差为: σ 2 \\sigma ^2 σ2。
例程 9.1:高斯噪声(Gauss Noise)
# 9.1:高斯噪声 (GaussNoise)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
# img = np.ones([256, 256]) * 128
mu, sigma = 0.0, 20.0
noiseGause = np.random.normal(mu, sigma, img.shape)
imgGaussNoise = img + noiseGause
imgGaussNoise = np.uint8(cv2.normalize(imgGaussNoise, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("GaussNoise"), plt.axis('off')
plt.imshow(imgGaussNoise, 'gray')
plt.subplot(133), plt.title("Gray Hist")
histNP, bins = np.histogram(imgGaussNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()

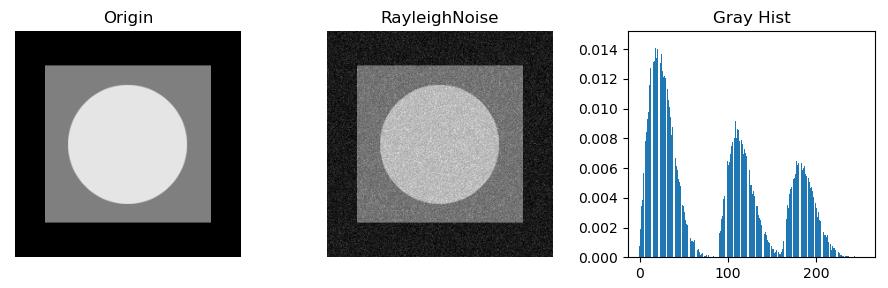
2.2 瑞利噪声 (Rayleigh Noise)
瑞利噪声的概率密度函数为
p
(
z
)
=
2
/
b
∗
(
z
−
a
)
e
−
(
z
−
a
)
2
/
b
,
z
≥
a
0
,
z
<
a
p(z) = \\begincases 2/b * (z-a) e^-(z-a)^2 /b &, z \\ge a\\\\ 0&, z < a \\endcases
p(z)=2/b∗(z−a)e−(z−a)2/b0,z≥a,z<a
瑞利噪声的均值和标准差为:
z
ˉ
=
a
+
π
b
/
4
σ
2
=
b
(
4
−
π
)
/
4
\\barz = a + \\sqrt\\pi b/4 \\\\ \\sigma ^2 = b(4-\\pi)/4
zˉ=a+πb/4σ2=b(4−π)/4
瑞利噪声概率密度分布到原点的距离及密度的基本形状右偏,常用于倾斜形状直方图的建模。
例程 9.2:瑞利噪声 (Rayleigh Noise)
# # 9.2:瑞利噪声 (RayleighNoise)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
# img = np.ones([256, 256]) * 128
a = 30.0
noiseRayleigh = np.random.rayleigh(a, size=img.shape)
imgRayleighNoise = img + noiseRayleigh
imgRayleighNoise = np.uint8(cv2.normalize(imgRayleighNoise, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("RayleighNoise"), plt.axis('off')
plt.imshow(imgRayleighNoise, 'gray')
plt.subplot(133), plt.title("Gray Hist")
histNP, bins = np.histogram(imgRayleighNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()
2.3 爱尔兰噪声 (Ireland Noise)
爱尔兰噪声的概率密度函数为
p
(
z
)
=
a
b
z
b
−
1
(
b
−
1
)
!
e
−
a
z
,
z
≥
0
0
,
z
<
0
p(z) = \\begincases \\fraca^b z^b-1(b-1)! e^-az &, z \\ge 0\\\\ 0&, z < 0 \\endcases
p(z)=(b−1)!abzb−1e−az0,z≥0,z<0
爱尔兰噪声的均值和标准差为:
z
ˉ
=
b
/
a
σ
2
=
b
/
a
2
\\barz = b/a \\\\ \\sigma ^2 = b/a^2
zˉ=b/aσ2=b/a2
当标准差的分母 a 2 a^2 a2为伽马函数时,称为伽马噪声。
例程 9.3:伽马噪声 (Gamma Noise)
# # 9.3:伽马噪声 (Gamma Noise)
img = cv2.imread("../images/Fig0503.tif", 0) # flags=0 读取为灰度图像
# img = np.ones([256, 256]) * 128
a, b = 10.0, 2.5
noiseGamma = np.random.gamma(shape=b, scale=a, size=img.shape)
imgGammaNoise = img + noiseGamma
imgGammaNoise = np.uint8(cv2.normalize(imgGammaNoise, None, 0, 255, cv2.NORM_MINMAX)) # 归一化为 [0,255]
plt.figure(figsize=(9, 3))
plt.subplot(131), plt.title("Origin"), plt.axis('off')
plt.imshow(img, 'gray', vmin=0, vmax=255)
plt.subplot(132), plt.title("Gamma noise"), plt.axis('off')
plt.imshow(imgGammaNoise, 'gray')
plt.subplot(133), plt.title("Gray hist")
histNP, bins = np.histogram(imgGammaNoise.flatten(), bins=255, range=[0, 255], density=True)
plt.bar(bins[:-1], histNP[:])
plt.tight_layout()
plt.show()

(本节完)
版权声明:
youcans@xupt 原创作品,转载必须标注原文链接
Copyright 2021 youcans, XUPT
Crated:2022-2-1
欢迎关注 『OpenCV 例程200篇』 系列,持续更新中
欢迎关注 『Python小白的OpenCV学习课』 系列,持续更新中
【OpenCV 例程200篇】01. 图像的读取(cv2.imread)
【OpenCV 例程200篇】02. 图像的保存(cv2.imwrite)
【OpenCV 例程200篇】03. 图像的显示(cv2.imshow)
【OpenCV 例程200篇】04. 用 matplotlib 显示图像(plt.imshow)
【OpenCV 例程200篇】05. 图像的属性(np.shape)
【OpenCV 例程200篇】06. 像素的编辑(img.itemset)
【OpenCV 例程200篇】07. 图像的创建(np.zeros)
【OpenCV 例程200篇】08. 图像的复制(np.copy)
【OpenCV 例程200篇】09. 图像的裁剪(cv2.selectROI)
【OpenCV 例程200篇】10. 图像的拼接(np.hstack)
【OpenCV 例程200篇】11. 图像通道的拆分(cv2.split)
【OpenCV 例程200篇】12. 图像通道的合并(cv2.merge)
【OpenCV 例程200篇】13. 图像的加法运算(cv2.add)
【OpenCV 例程200篇】14. 图像与标量相加(cv2.add)
【OpenCV 例程200篇】15. 图像的加权加法(cv2.addWeight)
【OpenCV 例程200篇】16. 不同尺寸的图像加法
【OpenCV 例程200篇】17. 两张图像的渐变切换
【OpenCV 例程200篇】18. 图像的掩模加法
【OpenCV 例程200篇】19. 图像的圆形遮罩
【OpenCV 例程200篇】20. 图像的按位运算
【OpenCV 例程200篇】21. 图像的叠加
【OpenCV 例程200篇】22. 图像添加非中文文字
【OpenCV 例程200篇】23. 图像添加中文文字
【OpenCV 例程200篇】23. 图像添加中文文字
【OpenCV 例程200篇】24. 图像的仿射变换
【OpenCV 例程200篇】25. 图像的平移
【OpenCV 例程200篇】26. 图像的旋转(以原点为中心)
【OpenCV 例程200篇】27. 图像的旋转(以任意点为中心)
【OpenCV 例程200篇】28. 图像的旋转(直角旋转)
【OpenCV 例程200篇】29. 图像的翻转(cv2.flip)
【OpenCV 例程200篇】30. 图像的缩放(cv2.resize)
【OpenCV 例程200篇】31. 图像金字塔(cv2.pyrDown)
【OpenCV 例程200篇】32. 图像的扭变(错切)
【OpenCV 例程200篇】33. 图像的复合变换
【OpenCV 例程200篇】34. 图像的投影变换
【OpenCV 例程200篇】35. 图像的投影变换(边界填充)
【OpenCV 例程200篇】36. 直角坐标与极坐标的转换
【OpenCV 例程200篇】37. 图像的灰度化处理和二值化处理
【OpenCV 例程200篇】38. 图像的反色变换(图像反转)
【OpenCV 例程200篇】39. 图像灰度的线性变换
【OpenCV 例程200篇】40. 图像分段线性灰度变换
【OpenCV 例程200篇】41. 图像的灰度变换(灰度级分层)
【OpenCV 例程200篇】42. 图像的灰度变换(比特平面分层)
【OpenCV 例程200篇】43. 图像的灰度变换(对数变换)
【OpenCV 例程200篇】44. 图像的灰度变换(伽马变换)
【OpenCV 例程200篇】45. 图像的灰度直方图
【OpenCV 例程200篇】46. 直方图均衡化
【OpenCV 例程200篇】47. 图像增强—直方图匹配
【OpenCV 例程200篇】48. 图像增强—彩色直方图匹配
【OpenCV 例程200篇】49. 图像增强—局部直方图处理
【OpenCV 例程200篇】50. 图像增强—直方图统计量图像增强
【OpenCV 例程200篇】51. 图像增强—直方图反向追踪
【OpenCV 例程200篇】52. 图像的相关与卷积运算
【OpenCV 例程200篇】53. Scipy 实现图像二维卷积
【OpenCV 例程200篇】54. OpenCV 实现图像二维卷积
【OpenCV 例程200篇】55. 可分离卷积核
【OpenCV 例程200篇】56. 低通盒式滤波器
【OpenCV 例程200篇】57. 低通高斯滤波器
【OpenCV 例程200篇】58. 非线性滤波—中值滤波
【OpenCV 例程200篇】59. 非线性滤波—双边滤波
【OpenCV 例程200篇】60. 非线性滤波—联合双边滤波
【OpenCV 例程200篇】61. 导向滤波(Guided filter)
【OpenCV 例程200篇】62. 图像锐化——钝化掩蔽
【OpenCV 例程200篇】63. 图像锐化——Laplacian 算子
【OpenCV 例程200篇】64. 图像锐化——Sobel 算子
【OpenCV 例程200篇】65. 图像锐化——Scharr 算子
【OpenCV 例程200篇】66. 图像滤波之低通/高通/带阻/带通
【OpenCV 例程200篇】67. 空间域图像增强的综合应用
【OpenCV 例程200篇】68. 空间域图像增强的综合应用
【OpenCV 例程200篇】69. 连续非周期信号的傅立叶系数
【OpenCV 例程200篇】70. 一维连续函数的傅里叶变换
【OpenCV 例程200篇】71. 连续函数的取样
【OpenCV 例程200篇】72. 一维离散傅里叶变换
【OpenCV 例程200篇】73. 二维连续傅里叶变换
【OpenCV 例程200篇】74. 图像的抗混叠
【OpenCV 例程200篇】75. Numpy 实现图像傅里叶变换
【OpenCV 例程200篇】76. OpenCV 实现图像傅里叶变换
【OpenCV 例程200篇】77. OpenCV 实现快速傅里叶变换
【OpenCV 例程200篇】78. 频率域图像滤波基础
【OpenCV 例程200篇】79. 频率域图像滤波的基本步骤
【OpenCV 例程200篇】80. 频率域图像滤波详细步骤
【OpenCV 例程200篇】81. 频率域高斯低通滤波器
【OpenCV 例程200篇】82. 频率域巴特沃斯低通滤波器
【OpenCV 例程2以上是关于OpenCV 例程200篇91. 高斯噪声瑞利噪声爱尔兰噪声的主要内容,如果未能解决你的问题,请参考以下文章