遗留物检测算法及实现
Posted taotao1233
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了遗留物检测算法及实现相关的知识,希望对你有一定的参考价值。
从最终实现的角度来看,说不上是遗留物检测,至多是静止目标检测【运动物体长时间滞留检测】。实验室同学搞毕业设计,帮忙弄弄,也没弄成。
本文将分别给出老外论文+对应的代码【在老外论文基础上改进的】和国内的论文+代码【失败,能力不行】。总体思路都是帧间差分法,没有用sift特征匹配或者在线学习。
算法一:
《An abandoned object detection system based on dual backgroundsegmentation》 IEEE 2009
搞了两个背景缓冲区:
Current_background:初始为第一帧,其后对每个像素,若下一帧像素大于该背景像素,则该出背景像素加1,否则该处背景像素减1。【挺神奇的,好处是This way, even if the foreground ischanging at a fast pace, it will not affect the background but if theforeground is stationary, it gradually merges into the background.但是效果还是不及混合高斯,因为适应期太长太频繁了】
Buffer_background:论文上说每隔20秒更新一次,直接拷贝Current_background,遗留物检测直接通过Current_background和Buffer_background相减即可。【他这边认为一个遗留物丢弃满20秒,如果还在,则认为该遗留物为背景了】。随后,搞了一堆跟踪该区域的东西,我不太感兴趣。
本文对上述的改进的目标是物体如果被遗弃了,那么它就应该一直被检测到。我额外搞了一个遗弃背景模版abandon_background,用于记录遗弃物之前的背景图像。
A.若物体离开,则abandon相应区域恢复到当前current的值,buffer更新为当前整个current。B.若物体未离开,则用abandon对buffer局部更新
整体算法:
1. 第一帧,用来初始化Current_background和Buffer_background
2. 通过两个背景区域计算遗留物
3. 每一帧更新Current_background
4. 若时间间隔满足,更新Buffer_background和遗弃物背景abandon_background,更新计数器
a. 若遗弃物背景首次更新,根据current和buffer之差,在相应的地方赋current的值,其余为0
b. 进行物体离开判断,即:若abandon与current对应区域背景像素不同,则物体还未离开,否则离开
c. 若物体离开,将current更新abandon的相应区域,buffer复制完整的current
d. 若物体未离开,将abandon更新buffer的相应区域,abandon保持不变。
5. 读取下一帧,返回2
代码:
调用的函数:
#include "Model.h"
#define Th 50
#define Ta 90
int first_update = 0;//首次更新标志
void calc_fore(IplImage *current,IplImage *back,IplImage *fore)
int i,j;
for (i=0;i<current->height;i++)
for (j=0;j<current->width;j++)
if (abs((u_char)current->imageData[i*current->widthStep+j] - (u_char)back->imageData[i*current->widthStep+j]) <=Ta )
fore->imageData[i*current->widthStep+j] = 0;//background
else
fore->imageData[i*current->widthStep+j] = 255;//foreground
void update_currentback(IplImage *current,IplImage *curr_back)
int i,j;
int p,q;
for (i=0;i<current->height;i++)
for (j=0;j<current->width;j++)
p = (u_char)current->imageData[i * current->widthStep + j];
q = (u_char)curr_back->imageData[i * current->widthStep + j];
//printf("%d,%d\\n",p,q);
if (p >= q)
if (q == 255)
q = 254;
curr_back->imageData[i * current->widthStep + j] = q + 1;
else
if (q == 0)
q = 1;
curr_back->imageData[i * current->widthStep + j] = q - 1;
void update_bufferedback(IplImage *curr_back,IplImage *buf_back,IplImage *abandon)
int i,j,height,width;
int leave_flag = 0;
height = curr_back->height;
width = curr_back->widthStep;
if (first_update == 0)
for ( i = 0;i < height; i++)
for (j = 0;j < width; j++)
if (abs((u_char)curr_back->imageData[i*width+j] - (u_char)buf_back->imageData[i*width+j]) <=Th )
abandon->imageData[i*width+j] = 0;//background
else
abandon->imageData[i*width+j] = curr_back->imageData[i*width+j];//foreground
first_update = 1;
return;
//物体离开判断
for ( i = 0;i < height; i++)
for (j = 0;j < width; j++)
if (abandon->imageData[i*width+j] != 0)
if (abandon->imageData[i*width+j] != curr_back->imageData[i*width+j])
leave_flag = 1; //物体掩膜处之前背景与当前的不一致,1:物体未离开,0:物体离开
if(leave_flag == 0) //物体离开
cvCopy(curr_back,buf_back);
for ( i = 0;i < height; i++)
for (j = 0;j < width; j++)
if (abandon->imageData[i*width+j] != 0)
abandon->imageData[i*width+j] = curr_back->imageData[i*width+j];
else
for ( i = 0;i < height; i++)
for (j = 0;j < width; j++)
if (abandon->imageData[i*width+j] != 0)
buf_back->imageData[i*width+j] = abandon->imageData[i*width+j];
主函数:
// abandon_left.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "Model.h"
int _tmain(int argc, _TCHAR* argv[])
CvCapture *capture=cvCreateFileCapture("test.avi");
IplImage *current_back,*buff_back,*abandon,*frame,*current_img,*fore;
int count,intern;
frame = cvQueryFrame(capture);
fore = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
current_back = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
current_img = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
buff_back = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
abandon = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
count=0;
intern = count + 20;
while (1)
cvCvtColor(frame,current_img,CV_RGB2GRAY);
if (count == 0)
//初始化背景模版
cvCopy(current_img,current_back);
cvCopy(current_img,buff_back);
if (count > 0)
//计算前景掩膜
calc_fore(current_back,buff_back,fore);
//更新跟踪背景
update_currentback(current_img,current_back);
if (count == intern)
update_bufferedback(current_back,buff_back,abandon);
intern = count + 20;
cvShowImage("current",current_img);
cvShowImage("current_back",current_back);
cvShowImage("buff_back",buff_back);
cvShowImage("abandon detection",fore);
count++;
frame =cvQueryFrame(capture);
if (cvWaitKey(23)>=0)
break;
cvNamedWindow("current",0);
cvNamedWindow("buff_back",0);
cvNamedWindow("current_back",0);
cvNamedWindow("abandon detection",0);
cvReleaseCapture(&capture);
return 0;
效果图:

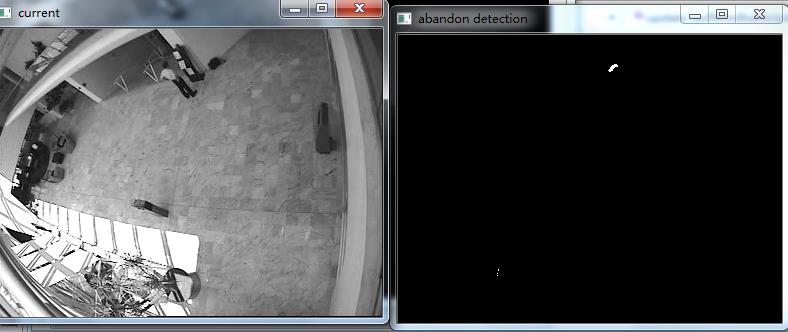

说明:左下角有个女的运动规律也符合静止目标检测规律,所以也被检测出来了。后期可以通过外接矩形长宽比等其他手段过滤掉。
视频+代码工程的下载连接:http://download.csdn.net/detail/jinshengtao/7157943
算法二:
《一种基于双背景模型的遗留物检测方法》
搞了个脏背景和纯背景,定义:
当视频场景中不出现运动目标,或者背景不受场景中所出现的运动目标影响时,这样的背景称为纯背景。否则,称为脏背景
它们的更新规则:
一般背景的更新按照帧间差分法:

脏背景使用全局更新,直接赋值一般背景:

纯背景根据前景掩膜,进行局部更新,即若前景掩膜被标记为运动的部分,则相应的纯背景区域用上一帧的纯背景更新;若前景掩膜被标记为非运动的部分,则相应的纯背景区域用当前帧的一般背景更新。

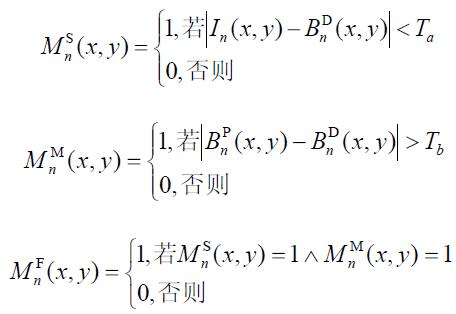
静止目标前景检测算法可以通过以下公式看明白:
具体算法流程不给咯,论文没提,自己摸索的,反正试验效果失败了。
代码:// left_bag.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#define u_char unsigned char
#define alfa 0.03
#define Th 60
#define Ta 60
#define Tb 40
void calc_fore(IplImage *current,IplImage *back,IplImage *fore)
int i,j;
for (i=0;i<current->height;i++)
for (j=0;j<current->width;j++)
if (abs((u_char)current->imageData[i*current->widthStep+j] - (u_char)back->imageData[i*current->widthStep+j]) <=Th )
fore->imageData[i*current->widthStep+j] = 0;//background
else
fore->imageData[i*current->widthStep+j] = 255;//foreground
void update_back(IplImage *current,IplImage *back,IplImage *B_p,IplImage *B_d,IplImage *fore,IplImage *B_p_pre)
int i,j;
//更新B_n
for (i=0;i<current->height;i++)
for (j=0;j<current->width;j++)
back->imageData[i*current->widthStep+j] = (1-alfa)*current->imageData[i*current->widthStep+j] + alfa * back->imageData[i*current->widthStep+j];
//更新B_d
cvCopy(back,B_d);
//更新B_p
for (i = 0;i < fore->height;i++)
for (j = 0;j < fore->width;j++)
if ((unsigned char)fore->imageData[i*fore->widthStep + j ] == 255)
B_p->imageData[i*fore->widthStep + j] = B_p_pre->imageData[i*fore->widthStep + j];
else
B_p->imageData[i*fore->widthStep + j] = back->imageData[i*fore->widthStep + j];
void calc_StaticTarget(IplImage *current,IplImage *B_d,IplImage *B_p,IplImage *M_s,IplImage *M_m,IplImage *M_f)
int i,j;
for (i = 0;i < current->height;i++)
for (j = 0;j < current->width;j++)
if (abs((u_char)current->imageData[i*current->widthStep+j] - (u_char)B_d->imageData[i*current->widthStep+j]) <= Th )
M_s->imageData[i*current->widthStep+j] = 255;
else
M_s->imageData[i*current->widthStep+j] = 0;
if (abs((u_char)B_p->imageData[i*current->widthStep+j] - (u_char)B_d->imageData[i*current->widthStep+j]) > Tb)
M_m->imageData[i*current->widthStep+j] = 255;
else
M_m->imageData[i*current->widthStep+j] = 0;
if (((unsigned char)M_m->imageData[i*current->widthStep+j] == 255) &&((unsigned char)M_s->imageData[i*current->widthStep+j] == 255))
M_f->imageData[i*current->widthStep+j] = 255;
else
M_f->imageData[i*current->widthStep+j] = 0;
int _tmain(int argc, _TCHAR* argv[])
CvCapture *capture=cvCreateFileCapture("test.avi");
IplImage *frame,*current_img,*B_n,*B_p,*B_d,*B_p_pre;
IplImage *M,*M1,*M_s,*M_m,*M_f;
int count,i,j;
frame = cvQueryFrame(capture);
current_img = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
B_n = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
B_p = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
B_d = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
B_p_pre = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
M = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
M1 = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
M_s = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
M_m = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
M_f = cvCreateImage(cvSize(frame->width,frame->height),IPL_DEPTH_8U,1);
count=0;
while (1)
cvCvtColor(frame,current_img,CV_RGB2GRAY);
if (count == 0)
//初始化各种背景模版
cvCopy(current_img,B_n);
cvCopy(current_img,B_p);
cvCopy(current_img,B_d);
cvCopy(current_img,B_p_pre);
if (count > 1)
//计算前景掩膜
calc_fore(current_img,B_n,M1);
//膨胀腐蚀操作
cvDilate(M1, M, 0, 1);
cvErode(M, M1, 0, 2);
cvDilate(M1, M, 0,1);
//静止目标检测
calc_StaticTarget(current_img,B_d,B_p,M_s,M_m,M_f);
//更新跟踪背景
update_back(current_img,B_n,B_p,B_d,M,B_p_pre);
cvShowImage("pure ground",B_p);
cvShowImage("dirty ground",B_d);
cvShowImage("static target",M_f);
cvShowImage("fore ground",M);
cvCopy(B_p,B_p_pre);
count++;
frame =cvQueryFrame(capture);
if (cvWaitKey(23)>=0)
break;
cvNamedWindow("pure ground",0);
cvNamedWindow("dirty ground",0);
cvNamedWindow("static target",0);
cvNamedWindow("fore ground",0);
cvReleaseCapture(&capture);
return 0;
算法三【MATLAB toolbox中的一个demo】
理论部分没看,在控制台直接输入:edit videoabandonedobj 会有相应的代码跳出来。
在help中搜索Abandoned Object Detection,会有理论部分介绍
视频素材下载地址:http://www.mathworks.cn/products/viprocessing/vipdemos.html
代码:【2010b 版本可跑】clc;
clear;
status = videogetdemodata('viptrain.avi');
if ~status
displayEndOfDemoMessage(mfilename);
return;
end
roi = [80 100 240 360];
% Maximum number of objects to track
maxNumObj = 200;
% Number of frames that an object must remain stationary before an alarm is
% raised
alarmCount = 45;
% Maximum number of frames that an abandoned object can be hidden before it
% is no longer tracked
maxConsecutiveMiss = 4;
% Maximum allowable change in object area in percent
areaChangeFraction = 15;
% Maximum allowable change in object centroid in percent
centroidChangeFraction = 20;
% Minimum ratio between the number of frames in which an object is detected
% and the total number of frames, for that object to be tracked.
minPersistenceRatio = 0.7;
% Offsets for drawing bounding boxes in original input video
PtsOffset = int32(repmat([roi(1); roi(2); 0 ; 0],[1 maxNumObj]));
hVideoSrc = video.MultimediaFileReader;
hVideoSrc.Filename = 'viptrain.avi';
hVideoSrc.VideoOutputDataType = 'single';
hColorConv = video.ColorSpaceConverter;
hColorConv.Conversion = 'RGB to YCbCr';
hAutothreshold = video.Autothresholder;
hAutothreshold.ThresholdScaleFactor = 1.3;
hClosing = video.MorphologicalClose;
hClosing.Neighborhood = strel('square',5);
hBlob = video.BlobAnalysis;
hBlob.MaximumCount = maxNumObj;
hBlob.NumBlobsOutputPort = true;
hBlob.MinimumBlobAreaSource = 'Property';
hBlob.MinimumBlobArea = 100;
hBlob.MaximumBlobAreaSource = 'Property';
hBlob.MaximumBlobArea = 2500;
hBlob.ExcludeBorderBlobs = true;
hDrawRectangles1 = video.ShapeInserter;
hDrawRectangles1.Fill = true;
hDrawRectangles1.FillColor = 'Custom';
hDrawRectangles1.CustomFillColor = [1 0 0];
hDrawRectangles1.Opacity = 0.5;
hDisplayCount = video.TextInserter;
hDisplayCount.Text = '%4d';
hDisplayCount.Color = [1 1 1];
hAbandonedObjects = video.VideoPlayer;
hAbandonedObjects.Name = 'Abandoned Objects';
hAbandonedObjects.Position = [10 300 roi(4)+25 roi(3)+25];
hDrawRectangles2 = video.ShapeInserter;
hDrawRectangles2.BorderColor = 'Custom';
hDrawRectangles2.CustomBorderColor = [0 1 0];
hDrawBBox = video.ShapeInserter;
hDrawBBox.BorderColor = 'Custom';
hDrawBBox.CustomBorderColor = [1 1 0];
hAllObjects = video.VideoPlayer;
hAllObjects.Position = [45+roi(4) 300 roi(4)+25 roi(3)+25];
hAllObjects.Name = 'All Objects';
hDrawRectangles3 = video.ShapeInserter;
hDrawRectangles3.BorderColor = 'Custom';
hDrawRectangles3.CustomBorderColor = [0 1 0];
hThresholdDisplay = video.VideoPlayer;
hThresholdDisplay.Position = ...
[80+2*roi(4) 300 roi(4)-roi(2)+25 roi(3)-roi(1)+25];
hThresholdDisplay.Name = 'Threshold';
firsttime = true;
while ~isDone(hVideoSrc)
Im = step(hVideoSrc);
% Select the region of interest from the original video
OutIm = Im(roi(1):end, roi(2):end, :);
YCbCr = step(hColorConv, OutIm);
CbCr = complex(YCbCr(:,:,2), YCbCr(:,:,3));
% Store the first video frame as the background
if firsttime
firsttime = false;
BkgY = YCbCr(:,:,1);
BkgCbCr = CbCr;
end
SegY = step(hAutothreshold, abs(YCbCr(:,:,1)-BkgY));
SegCbCr = abs(CbCr-BkgCbCr) > 0.05;
% Fill in small gaps in the detected objects
Segmented = step(hClosing, SegY | SegCbCr);
% Perform blob analysis
[Area, Centroid, BBox, Count] = step(hBlob, Segmented);
% Call the helper function that tracks the identified objects and
% returns the bounding boxes and the number of the abandoned objects.
[OutCount, OutBBox] = videoobjtracker(Area, Centroid, BBox, Count,...
areaChangeFraction, centroidChangeFraction, maxConsecutiveMiss, ...
minPersistenceRatio, alarmCount);
% Display the abandoned object detection results
Imr = step(hDrawRectangles1, Im, OutBBox+PtsOffset);
Imr(1:15,1:30,:) = 0;
Imr = step(hDisplayCount, Imr, OutCount);
step(hAbandonedObjects, Imr);
% Display all the detected objects
Imr = step(hDrawRectangles2, Im, BBox+PtsOffset);
Imr(1:15,1:30,:) = 0;
Imr = step(hDisplayCount, Imr, OutCount);
Imr = step(hDrawBBox, Imr, roi);
step(hAllObjects, Imr);
% Display the segmented video
SegIm = step(hDrawRectangles3, repmat(Segmented,[1 1 3]), BBox);
step(hThresholdDisplay, SegIm);
end
release(hVideoSrc);虽然不是自己的研究方向,但也算尝试了吧。马上快答辩咯,攒个人品先~
以上是关于遗留物检测算法及实现的主要内容,如果未能解决你的问题,请参考以下文章
(转载)利用SIFT和RANSAC算法(openCV框架)实现物体的检测与定位,并求出变换矩阵(findFundamentalMat和findHomography的比较) 置顶
Backbone 之 DetNet:为检测而生(Pytorch实现及代码解析)
Detectron系统实现了最先进的物体检测算法https://github.com/facebookresearch/Detectron