Velodyne16线激光雷达和IMU惯导程序开发
Posted 王张飞
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Velodyne16线激光雷达和IMU惯导程序开发相关的知识,希望对你有一定的参考价值。
需求:
1、程序能够在线读取Velodyne雷达数据、IMU惯导数据。
2、能够读取离线的三维点云数据。
3、能够在线以及离线对点云目标进行分割。
开发环境:
win7、python3.5.2
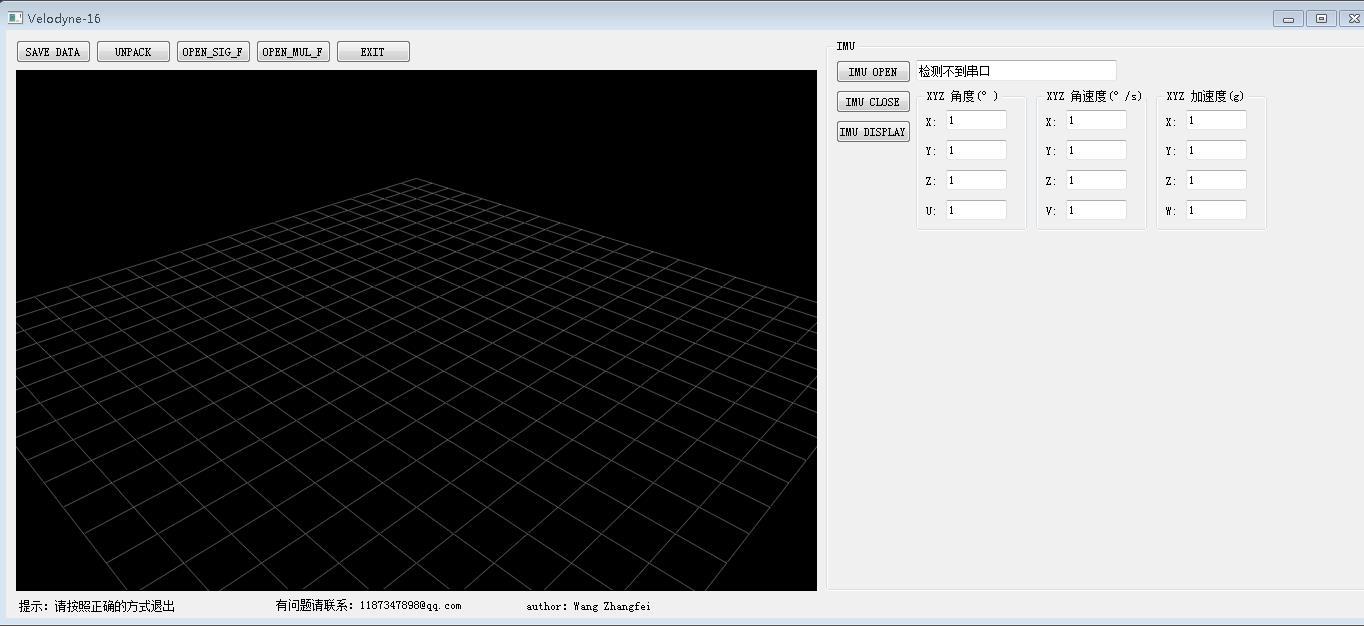
程序界面:
目前的程序开发界面,暂定如下(虽然有点丑~):
离线显示:
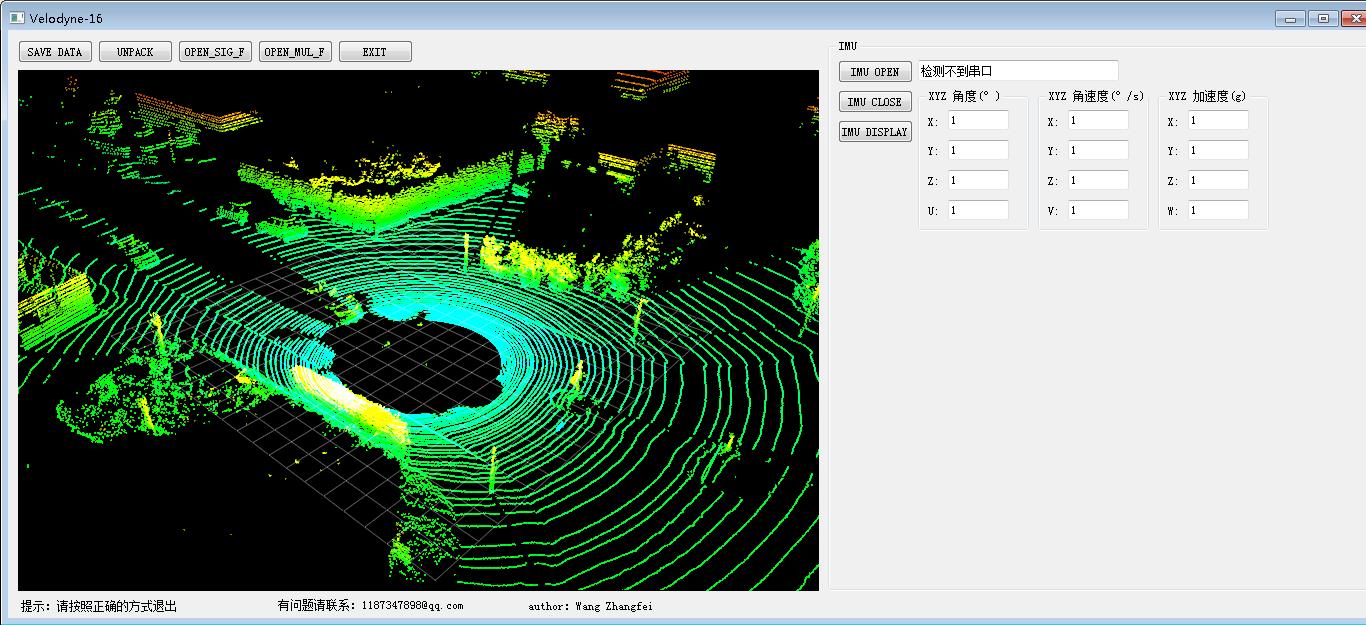
优化后
# TODO:
# 激光雷达被别人在使用,没有经过实际测试
# 点云数据支持格式txt、pcd、bin,其他格式未添加
源码:
正在优化程序,等优化完成后会进行上传~
以上是关于Velodyne16线激光雷达和IMU惯导程序开发的主要内容,如果未能解决你的问题,请参考以下文章