Vision Transformer
Posted v1dv1dv1d
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Vision Transformer相关的知识,希望对你有一定的参考价值。
Vision Transformer代码实现
# vit模型中使用的正则化方法
# 类似于dropout
# 其含义为:在一个batch中,有drop_prob概率使若干个样本不会经过主干传播(例如linear层),而是以0为值进行传播
def drop_path(x,drop_prob=0.,training = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
shape = (x.shape[0],) + (1,) * (x.ndim - 1)
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
"""
Drop paths (Stochastic Depth) per sample (when applied in main path of residual blocks).
"""
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
class PatchEmbed(nn.Module):
# img_size 为图片大小
# patch_size 为分割成的patch的大小
# in_c 为输入土图片的维度 RGB图片的 in_c = 3
# embed_dim 为将patch 映射成vector的大小,类似于transformer中的 d_model 和 d_word_vec
# norm_layer 为规定的正则化方法
def __init__(self, img_size=224, patch_size=16, in_c=3, embed_dim=768, norm_layer=None):
super().__init__()
img_size = (img_size, img_size)
patch_size = (patch_size, patch_size)
self.img_size = img_size
self.patch_size = patch_size
self.grid_size = (img_size[0] // patch_size[0], img_size[1] // patch_size[1])
# 最后patch的数量类似于transformer中的句子长度 n = 图片长度*图片宽度/patch大小/patch大小
self.num_patches = self.grid_size[0] * self.grid_size[1]
# self.proj 将图片映射成 self.num_pathes 个 维度为 embed_dim的向量组
self.proj = nn.Conv2d(in_c, embed_dim, kernel_size=patch_size, stride=patch_size)
self.norm = norm_layer(embed_dim) if norm_layer else nn.Identity()
def forward(self,x):
# X的维度为(batchsize,channel,图片长度,图片宽度)
B,C,H,W = x.shape
assert H == self.img_size[0] and W == self.img_size[1], \\
f"Input image size (H*W) doesn't match model (self.img_size[0]*self.img_size[1])."
#(batchsize,in_c ,图片长度,图片宽度) proj(x) -> (batchsize,embed_dim,self.grid_size[0],self.grid_size[1])
# self.grid_size[0] 是根据 原图片长度 与 卷积核大小、stride计算出来的 self.gird_size[1] 同理
#(batchsize,embed_dim,self.grid_size[0],self.grid_size[1]) flatten(2) ->
# (batchsize , embed_dim , self.grid_size[0]*self.grid_size[1]) transpose(1,2) ->
# (batchsize , self.grid_size[0]*self.grid_size[1],embed_dim)
# 此时x就将一batch图片转化成了 nlp中的序列 可以输入到transformer中了
x = self.proj(x).flatten(2).transpose(1, 2)
x = self.norm(x)
return x
class Attention(nn.Module):
# dim为 token的维度大小
# num_heads 为多头注意力机制中的head个数
# attn_drop_ratio 为 注意力机制中 ScaledDotProductAttention 中的Layer norm中的p
# proj_drop_ratop 为 concat之后是否经过 Layer norm
def __init__(self,
dim, # 输入token的dim
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop_ratio=0.,
proj_drop_ratio=0.):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
# 和 transformer中的 操作有区别。
# transformer中的多头注意力机制中的head_dim = dim,最后concat成的dim 为 n_head * dim
# vit 中的 head_dim = dim / n_head,最后concat成的dim 为 dim
self.scale = qk_scale or head_dim ** -0.5
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop_ratio)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop_ratio)
def forward(self,x):
# 这里的num_patches比self.num_patches多了1 多的 1 为 classes 标记 用来分类
# x (bacth_size,num_patches,dim)
B,N,C = x.shape
# (bacth_size,num_patches,dim) -> self.qkv(x) -> (bacth_size,num_patches,dim*3)
# (bacth_size,num_patches,dim*3) -> reshape -> (bacth_size,num_patches,3,n_head,每个head的dim=dim/n_head)
#(bacth_size,num_patches,3,n_head,每个head的dim=dim/n_head) -> permute -> (3,bacth_size,n_head,num_patches,每个head的dim=dim/n_head)
qkv = self.qkv(x).reshape(B, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q = qkv[0]
k = qkv[1]
v = qkv[2]
# q,k,v (bacth_size,n_head,num_patches,每个head的dim=dim/n_head)
attn = (q @ k.transpose(-2,-1)) * self.scale
# attn (bacth_size,n_head,num_patches,num_patches) 表示patches之间的相似度
attn = attn.softmax(dim = -1)
attn = self.attn_drop(attn)
# (attn @ v) : (bacth_size,n_head,num_patches,每个head的dim=dim/n_head)
# (bacth_size,n_head,num_patches,每个head的dim=dim/n_head) -> transpose -> (bacth_size,num_patches,n_head,每个head的dim=dim/n_head)
# (bacth_size,num_patches,n_head,每个head的dim=dim/n_head) -> reshape -> (bacth_size,num_patches,dim)
x = (attn @ v).transpose(1,2).reshape(B,N,C)
# 在transformer中 每个head的dim 就等于 dim,最后通过一个linear层将n_head *dim 重新映射成 dim,即proj操作
# (bacth_size,num_patches,dim) -> proj -> (bacth_size,num_patches,dim)
x = self.proj(x)
x = self.proj_drop(x)
return x
class Mlp(nn.Module):
"""
MLP as used in Vision Transformer, MLP-Mixer and related networks
"""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
class Block(nn.Module):
# dim 为patch维度大小
# num_heads 为多头注意力机制中的n_head
# mlp_ratio 为 mlp层中的hidden层的维度,一般默认设置为(dim*4)
# drop_ratio 为全连接层和attention层最后通过的dropout
# atte_drop_ratio 为注意力机制中q k 矩阵乘积 softmax完毕之后通过的dropout层的参数
# drop_path_ratio 为drop_path 正则化的参数 block中多层注意力和mlp完毕后会经过drop_path
def __init__(self,
dim,
num_heads,
mlp_ratio=4.,
qkv_bias=False,
qk_scale=None,
drop_ratio=0.,
attn_drop_ratio=0.,
drop_path_ratio=0.,
act_layer=nn.GELU,
norm_layer=nn.LayerNorm):
super(Block, self).__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(dim, num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale,
attn_drop_ratio=attn_drop_ratio, proj_drop_ratio=drop_ratio)
# NOTE: drop path for stochastic depth, we shall see if this is better than dropout here
self.drop_path = DropPath(drop_path_ratio) if drop_path_ratio > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop_ratio)
def forward(self, x):
x = x + self.drop_path(self.attn(self.norm1(x)))
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
class VisionTransformer(nn.Module):
# img_size 为图片的大小
# patch_size 为一个patch块的大小
# in_c 为通道数 RGB图像为3
# num_classes 为classification的分类数
# embed_dim 为贯穿模型始终的dim(注意【class】)
# depth 为重复堆叠block的次数
# nun_head 为 n_head
# mlp_ratio 为 mlp层中hidden层大小,一般为dim * 4
# representation_size 在最后的mlp head 做分类时是否额外加上一层linear层 representation_size代表hidden层个数
# distilled DERT 中使用(暂时不懂)
# drop_ratio为全连接层和attention层最后通过的dropout
# atte_drop_ratio 为注意力机制中q k 矩阵乘积 softmax完毕之后通过的dropout层的参数
# drop_path_ratio 为drop_path 正则化的参数 block中多层注意力和mlp完毕后会经过drop_path
def __init__(self, img_size=224, patch_size=16, in_c=3, num_classes=1000,
embed_dim=768, depth=12, num_heads=12, mlp_ratio=4.0, qkv_bias=True,
qk_scale=None, representation_size=None, distilled=False, drop_ratio=0.,
attn_drop_ratio=0., drop_path_ratio=0., embed_layer=PatchEmbed, norm_layer=None,
act_layer=None):
super(VisionTransformer, self).__init__()
self.num_classes = num_classes
self.num_features = self.embed_dim = embed_dim # num_features for consistency with other models
# distilled 在Dert中除了添加【class】以外还需要添加dist_token
self.num_tokens = 2 if distilled else 1
norm_layer = norm_layer or partial(nn.LayerNorm, eps=1e-6)
act_layer = act_layer or nn.GELU
self.patch_embed = embed_layer(img_size=img_size, patch_size=patch_size, in_c=in_c, embed_dim=embed_dim)
# 还能这么用??
num_patches = self.patch_embed.num_patches
#添加class token(1,1,embed_dim) 分别对应 batch_size,patch的个数,dim
# 添加完class token 之后 输入的序列就变成了 batch_size, patch个数+1 , dim
self.cls_token = nn.Parameter(torch.zeros(1, 1, embed_dim))
self.dist_token = nn.Parameter(torch.zeros(1, 1, embed_dim)) if distilled else None
# pos_embed 跟 拼接之后的数据相对应
self.pos_embed = nn.Parameter(torch.zeros(1, num_patches + self.num_tokens, embed_dim))
self.pos_drop = nn.Dropout(p=drop_ratio)
# 针对于每一个block ,执行不同程度的drop_path,越后面的层drop程度越大
dpr = [x.item() for x in torch.linspace(0, drop_path_ratio, depth)] # stochastic depth decay rule
self.blocks = nn.Sequential(*[
Block(dim=embed_dim, num_heads=num_heads, mlp_ratio=mlp_ratio, qkv_bias=qkv_bias, qk_scale=qk_scale,
drop_ratio=drop_ratio, attn_drop_ratio=attn_drop_ratio, drop_path_ratio=dpr[i],
norm_layer=norm_layer, act_layer=act_layer)
for i in range(depth)
])
self.norm = norm_layer(embed_dim)
# 如果传入representation_size,则代表在mlp_head 最后分类的时候额外添加一个隐藏层为representation_size大小的linear层
# 激活函数使用tanh
# Representation layer
if representation_size and not distilled:
self.has_logits = True
self.num_features = representation_size
self.pre_logits = nn.Sequential(OrderedDict([
("fc", nn.Linear(embed_dim, representation_size)),
("act", nn.Tanh())
]))
else:
self.has_logits = False
self.pre_logits = nn.Identity()
# Classifier head(s)
# 最后进行分类
self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()
self.head_dist = None
if distilled:
self.head_dist = nn.Linear(self.embed_dim, self.num_classes) if num_classes > 0 else nn.Identity()
# Weight init
nn.init.trunc_normal_(self.pos_embed, std=0.02)
if self.dist_token is not None:
nn.init.trunc_normal_(self.dist_token, std=0.02)
nn.init.trunc_normal_(self.cls_token, std=0.02)
self.apply(_init_vit_weights)
def forward_features(self, x):
# x 初始 (batch_size,channel,height,width) -> patch_embed(x) -> (batch_size,num_patches,dim)
x = self.patch_embed(x) # [B, 196, 768]
# cls_token 初始为(1,1,dim) -> expand (batch_size,1,dim) :这样就能和x concat
cls_token = self.cls_token.expand(x.shape[0], -1, -1)
# 在vit中 dist_token 为 None
# x 和 cls_token concat 之后就变成 (batch_size,num_patches+1,dim)
# 在DERT中 dist_token 为 True
# x 和 cls_token、dist_token concat 之后就变成 (batch_size,num_patches+2,dim)
if self.dist_token is None:
x = torch.cat((cls_token, x), dim=1) # [B, 197, 768]
else:
x = torch.cat((cls_token, self.dist_token.expand(x.shape[0], -1, -1), x), dim=1)
# 添加位置编码 shape不变 (batch_size,num_patches+1,dim)
x = self.pos_drop(x + self.pos_embed)
# 经过一系列 block块后x的shape也不会变 (batch_size,num_patches+1,dim)
x = self.blocks(x)
x = self.norm(x)
# vit中只利用 [class] 来对模型进行预测
# pre_logits 提取所有batch的第二个维度的第0个index做预测
# 此刻返回的数据为 (batch_size,dim) !!!!!!!!!!!!
if self.dist_token is None:
return self.pre_logits(x[:, 0])
else:
return x[:, 0], x[:, 1]
def forward(self, x):
# x 初始 (batch_size,channel,height,width) -> forward_feature(x) -> (batch_size,dim)
x = self.forward_features(x)
# vit中 self.head_dist 为 None
if self.head_dist is not None:
x, x_dist = self.head(x[0]), self.head_dist(x[1])
if self.training and not torch.jit.is_scripting():
return x, x_dist
else:
return (x + x_dist) / 2
else:
x = self.head(x)
return x
def _init_vit_weights(m):
if isinstance(m, nn.Linear):
nn.init.trunc_normal_(m.weight, std=.01)
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.LayerNorm):
nn.init.zeros_(m.bias)
nn.init.ones_(m.weight)
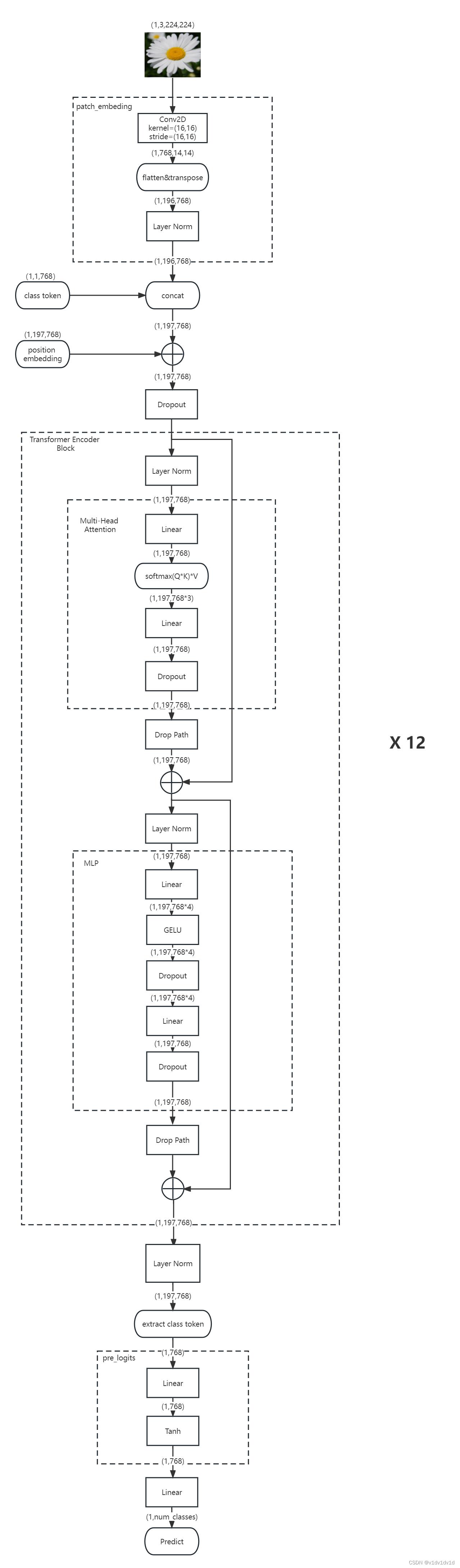
配合图表食用效果更佳
图片的维度信息为(batchsize,channel,高,宽)
以上是关于Vision Transformer的主要内容,如果未能解决你的问题,请参考以下文章
[Python人工智能] 三十六.基于Transformer的商品评论情感分析 keras构建多头自注意力(Transformer)模型
[Python人工智能] 三十六.基于Transformer的商品评论情感分析 keras构建多头自注意力(Transformer)模型
Transformer专题Vision Transformer(ViT)原理 + 代码
轴承RUL预测代码基于TCNTCN和多头注意力(TCN和Transformer的encoder结合)Transformer模型的轴承RUL预测代码(精华)