paper:A Deep Learning based Stock Trading Model with 2-D CNN Trend Detection 2D CNN模型
Posted David_7788
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了paper:A Deep Learning based Stock Trading Model with 2-D CNN Trend Detection 2D CNN模型相关的知识,希望对你有一定的参考价值。
2D CNN进行时序预测
paper:A Deep Learning based Stock Trading Model with 2-D CNN Trend Detection
paper使用了2-D的cnn对时序序列进行预测
步骤:
① 首先先对时序数据进行第一差分的处理方法,即前一天减去后一天,得到△值,然后使用tanh把值压缩到-1,1之间。
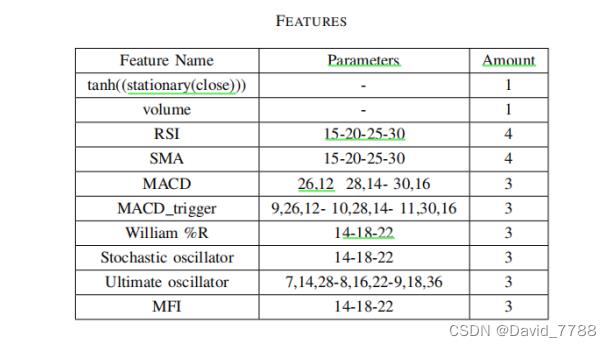
②由于2D CNN输入是一个正方形,这一篇paper的CNN输入是(28,28),第一个28是时间序列的长度,第二个是通过维度扩充把时序数据的特征维度扩充为28,这一篇paper扩维的方法是:由于这是一个股票预测的任务,因此他使用了股票方面的专家知识,通过计算下图的计算公式,把原数据的维度进行了扩充。
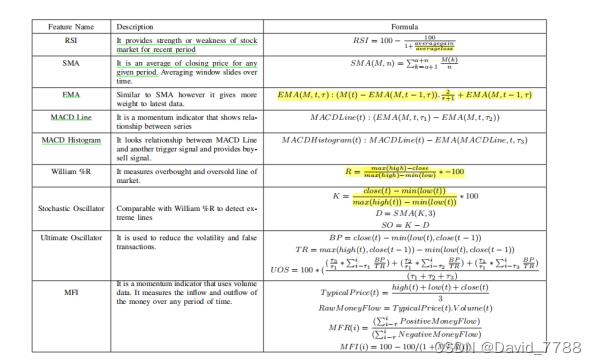
下表的Parameters就是每一个特征计算中的一些参数取值,Amount就是这一个参数计算了多少次,计算次数是与参数的不同取值相对应的
③处理好数据后就把数据送入模型的进行预测任务。下图是模型的流程图

④最后输出的是一个值,如何通过这个值AI判断是指买入,持有,还是卖出。
本paper中使用的是一个聚类算法,即在把原数据进行第一差分,并且使用tanh激活函数后,进行聚类算法得到阈值,即可知道模型输出值来判断买入,持有,还是卖出。
代码实现部分 (CNN_1D)
由于任务是进行变压器的时序预测,因此不适用使用股票方面的知识,无法通过计算股票相关的指标进行维度扩充,因此使用的是CNN_1D
输入数据维度为 (batch_size,seq_len.d_feature),其中batch_size为批量大小
seq_len为已知时间序列的长度,d_feature为特征维度
初始化模型
构建CNN的模型结构:
模型初始化部分的代码,和流程图不同的就是我没有使用dropout层,因为该模型对于本任务来说不会导致过拟合,因此没有使用dropout层,其他的就是和流程图的相同
class CNN_1D(nn.Module):
def __init__(self,args,in_channels=7,in_channels_other=96,conv_kernel_size=33,conv_stride=1,out_channels1=32,out_channels2=64,out_channels3=128,pool_kernel_size=4,padding=16):
'''
Args:
in_channels=7代表输入数据的第一个维度(特征维度);in_channels_other=96代表输入数据的第二个维度(时间维度:已知多长的时间序列)
conv_kernel_size=33是卷积核的大小,这里使用的三个卷积核大小都是一样的,conv_stride=1代表卷积核一次滑动的步长
out_channels1=32是第一个卷积后的输出维度,out_channels2=64是第二个卷积后的输出维度,out_channels3=128是第三个卷积后的输出维度
padding是卷积时候周围补零的数目,为了使的卷积出来的数据第二个维度即时间维度不改变,
padding=(conv_kernel_size-1)/2,(当string为1时)
pool_kernel_size=4是maxPool1d的核大小,并且maxPooling的步长默认和pooling核大小一样,
'''
self.seq_len = args.seq_len # seq_len 已知的时间序列的长度
self.pred_len = args.pred_len # pred_len 是预测的时间序列的长度
super(CNN_1D, self).__init__()
# 输入是(batch_size,in_channels,seq_len),输出是(batch_size,out_channels1,seq_len),扩充了特征维度
self.conv1 = nn.Conv1d(in_channels=in_channels, out_channels=out_channels1, kernel_size=conv_kernel_size,padding=padding, stride=conv_stride)
# 输入是(batch_size,out_channels1,seq_len) 输出是(batch_size,out_channels2,seq_len)
self.conv2 = nn.Conv1d(in_channels=out_channels1, out_channels=out_channels2, kernel_size=conv_kernel_size,padding=padding, stride=conv_stride)
# 输入是(batch_size,out_channels2,seq_len),输出是(batch_size,out_channels3,seq_len)
self.conv3=nn.Conv1d(in_channels=out_channels2,out_channels=out_channels3,kernel_size=conv_kernel_size,padding=padding,stride=conv_stride)
# 输入是(batch_size,out_channels3,seq_len),输出是(batch_size,out_channels3,seq_len//pool_kernel_size) 压缩时间维度
self.pool = nn.MaxPool1d(kernel_size=pool_kernel_size, stride=pool_kernel_size)
# 输入是(batch_size,out_channels3,seq_len//pool_kernel_size),输出是(batch_size,out_channels3, 1) 对时间维度进行压缩
self.fc1 = nn.Linear(in_channels_other//pool_kernel_size, 1)
# 输入 (batch_size,1,out_channels3) 输出是(batch_size,1,out_channels2) 在特征维度上进行降维
self.fc2 = nn.Linear(out_channels3, out_channels2)
# 输入(batch_size,1, out_channels2)-->输出(batch_size,1,in_channels) 得到一天的预测结果
self.fc3 = nn.Linear(out_channels2, in_channels) # 在特征维度上进行降维
前向传播
由于一次只预测一天,因此以下的代码就是根据输入数据预测下一天的时间序列,并且把得到的结果拼接回已知的时间序列中,然后输入窗口在时间序列上滑动,每一次滑动的步长为1,窗口的尺寸为(batch_size,seq_len,d_feature),也就是代表每一次的输入的序列时间长度都为seq_len。
以下的代码是一次只预测一天,即就是预测给定时间窗口的下一天
其输入input_x就是时间窗口
def pred_onestep(self, input_x): # 每一次只预测一天
#input_x [batch,seq_len,dim]
# 因为conv1d 转为 input_x[batch,dim,seq_len]
x=self.conv1(input_x.permute(0,2,1))# 对时间维度卷积,变为(batch_size,out_channels1,seq_len)
x=torch.relu(x)
x=self.conv2(x)# 对时间维度卷积,变为(batch_size,out_channels2,seq_len)
x=torch.relu(x)
x=torch.relu(self.conv3(x))# 对时间维度卷积,变为(batch_size,out_channels3,seq_len)
x=self.pool(x) #输出变为(batch_size,out_channels3,seq_len//pool_kernel_size)
x=self.fc1(x)#把预测一天的结果seq=1
x=torch.relu(x)
x=x.permute(0,2,1)#开始处理dim维度
x=torch.relu(self.fc2(x)) # 输出是(batch_size,1,out_channels2)
x=self.fc3(x) # 输出(batch_size,1,in_channels)
return x
forward部分
本code只使用了enc_x,表示的是已知的时间序列的数据,不包括时间数据,其他的变量本code未使用,可以忽略
初始化预测结果pred_zero,初始化x_cat_pred用来装已知的时间序列和预测的时间序列
def forward(self, enc_x, enc_mark, y, y_mark): # 每一次预测一天,然后把这一次预测的结果拼到已知的时间序列后,然后在移动窗口,预测下一天的
'''
:param enc_x: 已知的时间序列 (batch_size,seq_len,dim)
以下的param本model未使用,不做过多介绍
:param enc_mark: 已知的时序序列的时间对应的时间矩阵,
:param y:
:param y_mark:
:return: x_cat_pred[:,-self.pred_len:,:] 将预测的时间序列的部分返回回去 (batch_size,pred)len,dim)
'''
全零初始化预测结果,叫pred_zero
将已知的时间序列和全零初始化的预测结果拼起来 ,叫x_cat_pred,后面输入数据在该处取
pred_zero = torch.zeros_like(enc_x[:, -self.pred_len:, :]).float() # 初始化预测的结果,shape(batch_size,pred_len,dim)
# 将已知的时间序列和pred拼接在一起,
x_cat_pred = torch.cat([enc_x[:, :self.seq_len, :], pred_zero], dim=1).float().to(enc_x.device) # shape(batch_size , seq_len+pred_len , dim)
以下是循环进行单步预测,把单步预测的结果拼接起来然后组合成结果
input_x就是滑动窗口,滑动的步长为1,滑动次数取决于预测的时间序列的长度,这里类似于CNN_1D的滑动方式
得到输入数据,就送入pred_onestep函数中,可以改输入时间序列下一天的结果,然后把结果再拼接回之前已经初始化过的x_cat_pred中。然后继续滑动,即下一步的预测是建立在上一步预测的结果之上。
for i in range(self.pred_len): # 循环预测的时间序列的长度,因为一次只预测一天的
input_x = x_cat_pred[:, i:i + self.seq_len, :].clone() # 得到每一次已知的时间序列,shape(batch_size,seq_len,dim)
pred = self.pred_onestep(input_x) # 得到下一天的预测结果,shape(batch_size,1,dim)
x_cat_pred[:, self.seq_len + i, :] = x_cat_pred[:, self.seq_len + i, :].clone() + pred.squeeze() # 将这一次的预测结果放入x_cat_pred中
当滑动次数和pred_len长度相同的时候,那么就停止滑动,把预测的部分的结果返回,与真实值进行loss计算,进行反向传播和更新梯度等操作
CNN_1D完整代码
import torch
import torch.nn as nn
#-------------------------------------------------------------------
# 一次取seq_len列,每一次滑动一列
# 输入模型的是(batch_size,seq_len,dim),如果想要预测后pred_len天
# 可以现在后pred_len天的位置全部初始化为0,那么滚动一次,就填上后面的值
# 直至滑动到最后,那么就把后面的pred_len切分出来,然后在和目标值计算loss
# -------------------------------------------------------------------
class CNN_1D(nn.Module):
def __init__(self,args,in_channels=7,in_channels_other=96,conv_kernel_size=33,conv_stride=1,out_channels1=32,out_channels2=64,out_channels3=128,pool_kernel_size=4,padding=16):
'''
Args:
in_channels=7代表输入数据的第一个维度(特征维度);in_channels_other=96代表输入数据的第二个维度(时间维度:已知多长的时间序列)
conv_kernel_size=33是卷积核的大小,这里使用的三个卷积核大小都是一样的,conv_stride=1代表卷积核一次滑动的步长
out_channels1=32是第一个卷积后的输出维度,out_channels2=64是第二个卷积后的输出维度,out_channels3=128是第三个卷积后的输出维度
padding是卷积时候周围补零的数目,为了使的卷积出来的数据第二个维度即时间维度不改变,
padding=(conv_kernel_size-1)/2,(当string为1时)
pool_kernel_size=4是maxPool1d的核大小,并且maxPooling的步长默认和pooling核大小一样,
'''
self.seq_len = args.seq_len # seq_len 已知的时间序列的长度
self.pred_len = args.pred_len # pred_len 是预测的时间序列的长度
super(CNN_1D, self).__init__()
# 输入是(batch_size,in_channels,seq_len),输出是(batch_size,out_channels1,seq_len),扩充了特征维度
self.conv1 = nn.Conv1d(in_channels=in_channels, out_channels=out_channels1, kernel_size=conv_kernel_size,padding=padding, stride=conv_stride)
# 输入是(batch_size,out_channels1,seq_len) 输出是(batch_size,out_channels2,seq_len)
self.conv2 = nn.Conv1d(in_channels=out_channels1, out_channels=out_channels2, kernel_size=conv_kernel_size,padding=padding, stride=conv_stride)
# 输入是(batch_size,out_channels2,seq_len),输出是(batch_size,out_channels3,seq_len)
self.conv3=nn.Conv1d(in_channels=out_channels2,out_channels=out_channels3,kernel_size=conv_kernel_size,padding=padding,stride=conv_stride)
# 输入是(batch_size,out_channels3,seq_len),输出是(batch_size,out_channels3,seq_len//pool_kernel_size) 压缩时间维度
self.pool = nn.MaxPool1d(kernel_size=pool_kernel_size, stride=pool_kernel_size)
# 输入是(batch_size,out_channels3,seq_len//pool_kernel_size),输出是(batch_size,out_channels3, 1) 对时间维度进行压缩
self.fc1 = nn.Linear(in_channels_other//pool_kernel_size, 1)
# 输入 (batch_size,1,out_channels3) 输出是(batch_size,1,out_channels2) 在特征维度上进行降维
self.fc2 = nn.Linear(out_channels3, out_channels2)
# 输入(batch_size,1, out_channels2)-->输出(batch_size,1,in_channels) 得到一天的预测结果
self.fc3 = nn.Linear(out_channels2, in_channels) # 在特征维度上进行降维
def pred_onestep(self, input_x): # 每一次只预测一天
#input_x [batch,seq_len,dim]
# 因为conv1d 转为 input_x[batch,dim,seq_len]
x=self.conv1(input_x.permute(0,2,1))# 对时间维度卷积,变为(batch_size,out_channels1,seq_len)
x=torch.relu(x)
x=self.conv2(x)# 对时间维度卷积,变为(batch_size,out_channels2,seq_len)
x=torch.relu(x)
x=torch.relu(self.conv3(x))# 对时间维度卷积,变为(batch_size,out_channels3,seq_len)
x=self.pool(x) #输出变为(batch_size,out_channels3,seq_len//pool_kernel_size)
x=self.fc1(x)#把预测一天的结果seq=1
x=torch.relu(x)
x=x.permute(0,2,1)#开始处理dim维度
x=torch.relu(self.fc2(x)) # 输出是(batch_size,1,out_channels2)
x=self.fc3(x) # 输出(batch_size,1,in_channels)
return x
def forward(self, enc_x, enc_mark, y, y_mark): # 每一次预测一天,然后把这一次预测的结果拼到已知的时间序列后,然后在移动窗口,预测下一天的
'''
:param enc_x: 已知的时间序列 (batch_size,seq_len,dim)
以下的param本model未使用,不做过多介绍
:param enc_mark: 已知的时序序列的时间对应的时间矩阵,
:param y:
:param y_mark:
:return: x_cat_pred[:,-self.pred_len:,:] 将预测的时间序列的部分返回回去 (batch_size,pred)len,dim)
'''
pred_zero = torch.zeros_like(enc_x[:, -self.pred_len:, :]).float() # 初始化预测的结果,shape(batch_size,pred_len,dim)
# 将已知的时间序列和pred拼接在一起,
x_cat_pred = torch.cat([enc_x[:, :self.seq_len, :], pred_zero], dim=1).float().to(enc_x.device) # shape(batch_size , seq_len+pred_len , dim)
for i in range(self.pred_len): # 循环预测的时间序列的长度,因为一次只预测一天的
input_x = x_cat_pred[:, i:i + self.seq_len, :].clone() # 得到每一次已知的时间序列,shape(batch_size,seq_len,dim)
pred = self.pred_onestep(input_x) # 得到下一天的预测结果,shape(batch_size,1,dim)
x_cat_pred[:, self.seq_len + i, :] = x_cat_pred[:, self.seq_len + i, :].clone() + pred.squeeze() # 将这一次的预测结果放入x_cat_pred中
return x_cat_pred[:,-self.pred_len:,:] # 返回总的预测的时间序列的结果,shape(batch_size,pred_len,dim)
以上是关于paper:A Deep Learning based Stock Trading Model with 2-D CNN Trend Detection 2D CNN模型的主要内容,如果未能解决你的问题,请参考以下文章