ESP32-MicroPython基础操作
Posted 向往生
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESP32-MicroPython基础操作相关的知识,希望对你有一定的参考价值。
用五篇文章,描述如何使用ESP32在MicroPython固件下,开发一个支持Modbus采集,MQTT上报,可OTA升级的IOT协议采集器。
这是第一篇,基础操作。
目录
1.下载固件到ESP32
esptool.py --chip esp32 --port /dev/ttyUSB0 erase_flash #擦除
esptool.py --chip esp32 --port /dev/ttyUSB1 --baud 460800 write_flash -z 0x1000 esp32-20220618-v1.19.1.bin #下载固件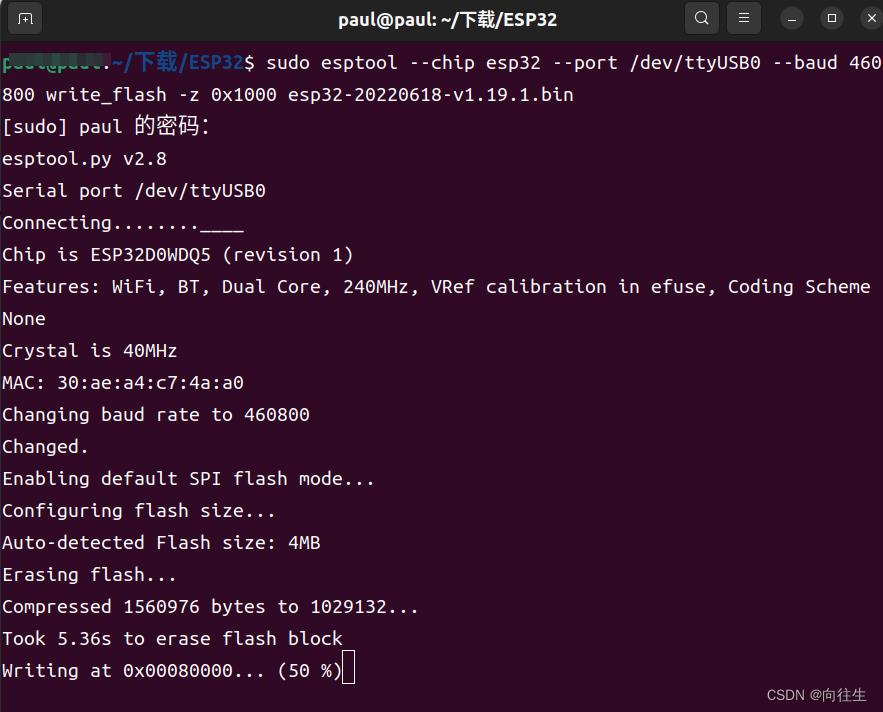
2.安装rshell
pip3 install rshell连接rshell
rshell --buffer-size 512 --port /dev/ttyUSB0进入ESP32的命令行:
repl3.打开自带教程
Welcome to MicroPython on the ESP32!
For generic online docs please visit http://docs.micropython.org/
For access to the hardware use the 'machine' module:
import machine
pin12 = machine.Pin(12, machine.Pin.OUT)
pin12.value(1)
pin13 = machine.Pin(13, machine.Pin.IN, machine.Pin.PULL_UP)
print(pin13.value())
i2c = machine.I2C(scl=machine.Pin(21), sda=machine.Pin(22))
i2c.scan()
i2c.writeto(addr, b'1234')
i2c.readfrom(addr, 4)
Basic WiFi configuration:
import network
sta_if = network.WLAN(network.STA_IF); sta_if.active(True)
sta_if.scan() # Scan for available access points
sta_if.connect("<AP_name>", "<password>") # Connect to an AP
sta_if.isconnected() # Check for successful connection
Control commands:
CTRL-A -- on a blank line, enter raw REPL mode
CTRL-B -- on a blank line, enter normal REPL mode
CTRL-C -- interrupt a running program
CTRL-D -- on a blank line, do a soft reset of the board
CTRL-E -- on a blank line, enter paste mode
For further help on a specific object, type help(obj)
For a list of available modules, type help('modules') 4.支持的模块
>>> help('modules')
__main__ gc ubluetooth upysh
_boot inisetup ucollections urandom
_onewire math ucryptolib ure
_thread micropython uctypes urequests
_uasyncio neopixel uerrno uselect
_webrepl network uhashlib usocket
apa106 ntptime uheapq ussl
btree onewire uio ustruct
builtins uarray ujson usys
cmath uasyncio/__init__ umachine utime
dht uasyncio/core umqtt/robust utimeq
ds18x20 uasyncio/event umqtt/simple uwebsocket
esp uasyncio/funcs uos uzlib
esp32 uasyncio/lock upip webrepl
flashbdev uasyncio/stream upip_utarfile webrepl_setup
framebuf ubinascii uplatform websocket_helper
5.WiFi模块
5.1 STA连接网络
import network
sta_if = network.WLAN(network.STA_IF); sta_if.active(True)
sta_if.scan() # Scan for available access points
sta_if.connect("612", "88888888") # Connect to an AP
sta_if.isconnected() # Check for successful connection
5.2 自身成为AP
import network #导入相应的库
ap_if=network.WLAN(network.AP_IF) #创建对象
ap_if.active(True) #激活接口,开启网络
ap_if.config(essid='向往生') #设置AP地点,你的名字6.点灯
from machine import Pin
import time #导入相关的库
led=Pin(2,Pin.OUT) #初始化
while True:
led.on() #灯泡打开
time.sleep(1) #延时一秒
led.off() #灯泡关闭
time.sleep(1) #延时一秒7.串口通讯
from machine import UART,Pin
import utime #导入库
uart=UART(1,115200) #一个普通的函数
led=Pin(25,Pin.OUT) #灯泡的初始化
uart.write("正在进行串口测试\\r\\n")
uart.write("请输入字符1或者0决定灯泡的开和关\\r\\n")
while True:
if uart.any()==True:
buf=uart.read(1)
if buf=='1':
led.on()
print("\\r\\n")
uart.write("\\r\\n")
elif buf=='0':
led.off()
print("\\r\\n")
uart.write("\\r\\n")
else:
print("\\r\\n")
uart.write("\\r\\n")
utime.sleep_ms(1)8.PWM
from machine import Pin,PWM #这里是是2号引脚,也就是那个小灯泡,亮度逐渐增加,再减少,循环
import utime
LED=PWM(Pin(2))
LED.freq(1000) #设置他的频率为1000HZ
LED_duty=0
LED_direction=1
while True:
LED_duty+=LED_direction
if LED_duty>=100:
LED_duty=100
LED_direction=-1
elif LED_duty<=0:
LED_duty=0
LED_direction=1
LED.duty_u16(int(LED_duty*655.35)) #改变占空比
if LED_duty%5==0:
print(LED_duty) #打印LED_duty的值
utime.sleep(0.01) #休息100ms9.按键
from machine import Pin
import time
button=Pin(0,Pin.IN,Pin.PULL_UP) #0号引脚按键,输入,上拉
led=Pin(2,Pin.OUT) #2号引脚就是板子上的灯
while True:
led.off() #小灯亮起来
if(button.value()==0): #判断按键是否按下
time.sleep_us(10)
if(button.value()==0):
led.on()
print("button is pressed")
while(button.value()==0):
time.sleep_ms(10)10.ADC
from machine import ADC,Pin #导入相应的库
adc=ADC(Pin(32),atten=ADC.ATTN_11DB) #ADC是16位的可测电压0-3.6v,但电压不要过高,防止烧毁芯片
while True:
adc_value=adc.read_u16()*3.55/65535
print("".format(adc_value)) #打印电压11.查看剩余内存
>>> import gc
>>> gc.mem_free() #查询空闲内存字节数
108944
>>> gc.collect() #内存垃圾回收12.文件操作
先进入rshell模式
rshell --buffer-size 512 --port /dev/ttyUSB0显示目录下的文件
ls /pyboard/.就会看到里面的文件,使用cp和rm来复制和删除文件
/home/paul/下载/ESP32> ls /pyboard/.
boot.py
/home/paul/下载/ESP32> cp /pyboard/boot.py ./
Copying '/pyboard/boot.py' to '/home/paul/下载/ESP32/boot.py' ...
/home/paul/下载/ESP32> rm main.py /pyboard/打开boot.py可以看见
# This file is executed on every boot (including wake-boot from deepsleep)
#import esp
#esp.osdebug(None)
#import webrepl
#webrepl.start()以上是关于ESP32-MicroPython基础操作的主要内容,如果未能解决你的问题,请参考以下文章