Arm Qt 实战一:简单使用Arm设备的串口
Posted 秦晓宇
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Arm Qt 实战一:简单使用Arm设备的串口相关的知识,希望对你有一定的参考价值。
1、Arm串口驱动程序
创建Serial类:serial.h、serial.cpp
#include "serial.h"
#include <QDebug>
#define printf qDebug
Serial::Serial()
bool Serial::opend(QString dev,BAUD_RATE buad,char nEvent)
fd = open(dev.toLocal8Bit().data(), O_RDWR);
if(fd < 0)
printf("open device = %s false!!",dev.toLatin1().data());
return false;
else
printf("open device = %s ok!!",dev.toLatin1().data());
switch(buad)
case BAUD115200:
printf("open set baud rate = 115200");
init(fd, B115200, &sendFd, &reciveFd);
break;
case BAUD38400:
printf("open set baud rate = 38400");
init(fd, B38400, &sendFd, &reciveFd);
break;
case BAUD19200:
printf("open set baud rate = 19200");
init(fd, B19200, &sendFd, &reciveFd);
break;
case BAUD9600:
printf("open set baud rate = 9600");
init(fd, B9600, &sendFd, &reciveFd);
break;
return true;
void Serial::closed()
close(fd);
bool Serial::init(int i_fd, speed_t i_baud, fd_set* i_sendSet, fd_set* i_rcvSet)
int i;
struct termios newtio;
printf("init");
FD_ZERO(i_rcvSet); // Çå¿Õ´®¿Ú½ÓÊն˿ڼ¯
FD_ZERO(i_sendSet); // Çå¿Õ´®¿Ú·¢ËͶ˿ڼ¯
FD_SET(i_fd,i_rcvSet); // ÉèÖô®¿Ú½ÓÊն˿ڼ¯
FD_SET(i_fd,i_sendSet); // ÉèÖô®¿Ú·¢ËͶ˿ڼ¯
bzero(&newtio, sizeof(newtio));
tcgetattr(i_fd, &newtio); // µÃµ½µ±Ç°´®¿ÚµÄ²ÎÊý
cfsetispeed(&newtio, i_baud); // ÉèÖÃÊäÈ벨ÌØÂÊÉè
cfsetospeed(&newtio, i_baud); // ÉèÖÃÊä³ö²¨ÌØÂÊÉè
newtio.c_cflag |= (CLOCAL | CREAD); // ʹÄܽÓÊÕ²¢Ê¹Äܱ¾µØ״̬
newtio.c_cflag &= ~PARENB; // ÎÞУÑé 8λÊý¾Ýλ1λֹͣλ
newtio.c_cflag &= ~CSTOPB;
newtio.c_cflag &= ~CSIZE;
newtio.c_iflag &= ~(ICRNL | IXON);
newtio.c_cflag |= CS8;
newtio.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG); // ÔʼÊý¾ÝÊäÈë
newtio.c_oflag &= ~(OPOST);
newtio.c_cc[VTIME] = 0; // ÉèÖõȴýʱ¼äºÍ×îС½ÓÊÕ×Ö·ûÊý
newtio.c_cc[VMIN] = 0;
tcflush(i_fd, TCIFLUSH); // ´¦Àíδ½ÓÊÕµÄ×Ö·û
tcsetattr(i_fd,TCSANOW,&newtio); // ¼¤»îÐÂÅäÖÃ
//this->start();
bool Serial::writed(char *data,int len)
write(fd, data, len);
bool Serial::writed(char *data)
write(fd, data, sizeof(data));
int Serial::readData(unsigned char *data,int len)
return read(fd,data,len);
int Serial::readData(char *data,int len)
int ret = read(fd,data,len);
return ret;
#ifndef SERIAL_H
#define SERIAL_H
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/mman.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <linux/types.h>
#include <linux/fb.h>
#include <stdio.h>
#include <sys/wait.h>
#include <pthread.h>
#include <netinet/in.h>
#include <sys/socket.h>
#include <unistd.h>
#include <time.h>
#include <termios.h>
#include <sys/select.h>
#include <QString>
#include <QThread>
class Serial
public:
Serial();
enum BAUD_RATE
BAUD115200,
BAUD38400,
BAUD19200,
BAUD9600,
;
bool opend(QString dev,BAUD_RATE buad,char nEvent);
bool init(int i_fd, speed_t i_baud, fd_set* i_sendSet, fd_set* i_rcvSet);
void closed();
bool writed(char *data,int len);
bool writed(char *data);
int readData(unsigned char *data,int len);
int readData(char *data,int len);
private:
int fd;
char writeBuf[50];
char reciveBuf[50];
fd_set sendFd,reciveFd;
void debug(QString str);
;
#endif // SERIAL_H
2、使用Serial操作串口
创建一个Rs485sender线程类,操作Serial进行数据的发送
rs485sender.cpp
#include "rs485sender.h"
#include <stdio.h>
#include <stdlib.h>
Rs485sender::Rs485sender(QObject *parent) :
QThread(parent)
com = new Serial();
com->opend("/dev/ttyO1",Serial::BAUD115200,'n');
moveToThread(this);
this->start();
void Rs485sender::run()
printf("Rs485sender::run\\r\\n");
char comInput[100];
while(true)
this->msleep(1000);
memset(comInput,0,sizeof(comInput));
QString comCmd = "send com2";
com->writed(comCmd.toLatin1().data(),comCmd.length());
printf("Rs485sender::send ----- \\r\\n");
rs485sender.h
#ifndef RS485SENDER_H
#define RS485SENDER_H
#include <QThread>
#include <QtCore>
#include <QString>
#include <QMap>
#include <QMutex>
#include <QTimer>
#include "../../util/serial.h"
class Rs485sender : public QThread
Q_OBJECT
public:
explicit Rs485sender(QObject *parent = 0);
private:
QMutex qmutex;
Serial *com;
protected:
void run();
QString getValue(QString in,QString cut);
void deal(char *in,int len);
signals:
public slots:
;
#endif // RS485SENDER_H
创建Rs485resver1进行数据的接收
rs485resver1.cpp
#include "rs485resver1.h"
#include <stdio.h>
#include <stdlib.h>
Rs485resver1::Rs485resver1(QObject *parent) :
QThread(parent)
com = new Serial();
com->opend("/dev/ttyO3",Serial::BAUD115200,'n');
moveToThread(this);
this->start();
void Rs485resver1::run()
printf("Rs485resver1::run\\r\\n");
char comInput[100];
while(true)
this->msleep(1000);
memset(comInput,0,sizeof(comInput));
// String com1Cmd = "read com2";
//com1Input->writed(com1Cmd.toLatin1().data(),com1Cmd.length());
int len = com->readData(comInput,sizeof(comInput));
printf("Rs485resver1::%s \\r\\n",comInput);
rs485resver1.h
#ifndef RS485RESVER1_H
#define RS485RESVER1_H
#include <QThread>
#include <QtCore>
#include <QString>
#include <QMap>
#include <QMutex>
#include <QTimer>
#include "../../util/serial.h"
class Rs485resver1 : public QThread
Q_OBJECT
public:
explicit Rs485resver1(QObject *parent = 0);
private:
QMutex qmutex;
Serial *com;
protected:
void run();
QString getValue(QString in,QString cut);
void deal(char *in,int len);
signals:
public slots:
;
#endif // RS485RESVER1_H
Main方法中调用
Rs485resver1 *rs485resver1;
Rs485resver2 *rs485resver2;
Rs485sender *rs485sender;
/*485总线测试*/
rs485resver1 = new Rs485resver1();
rs485resver2 = new Rs485resver2();
rs485sender = new Rs485sender();
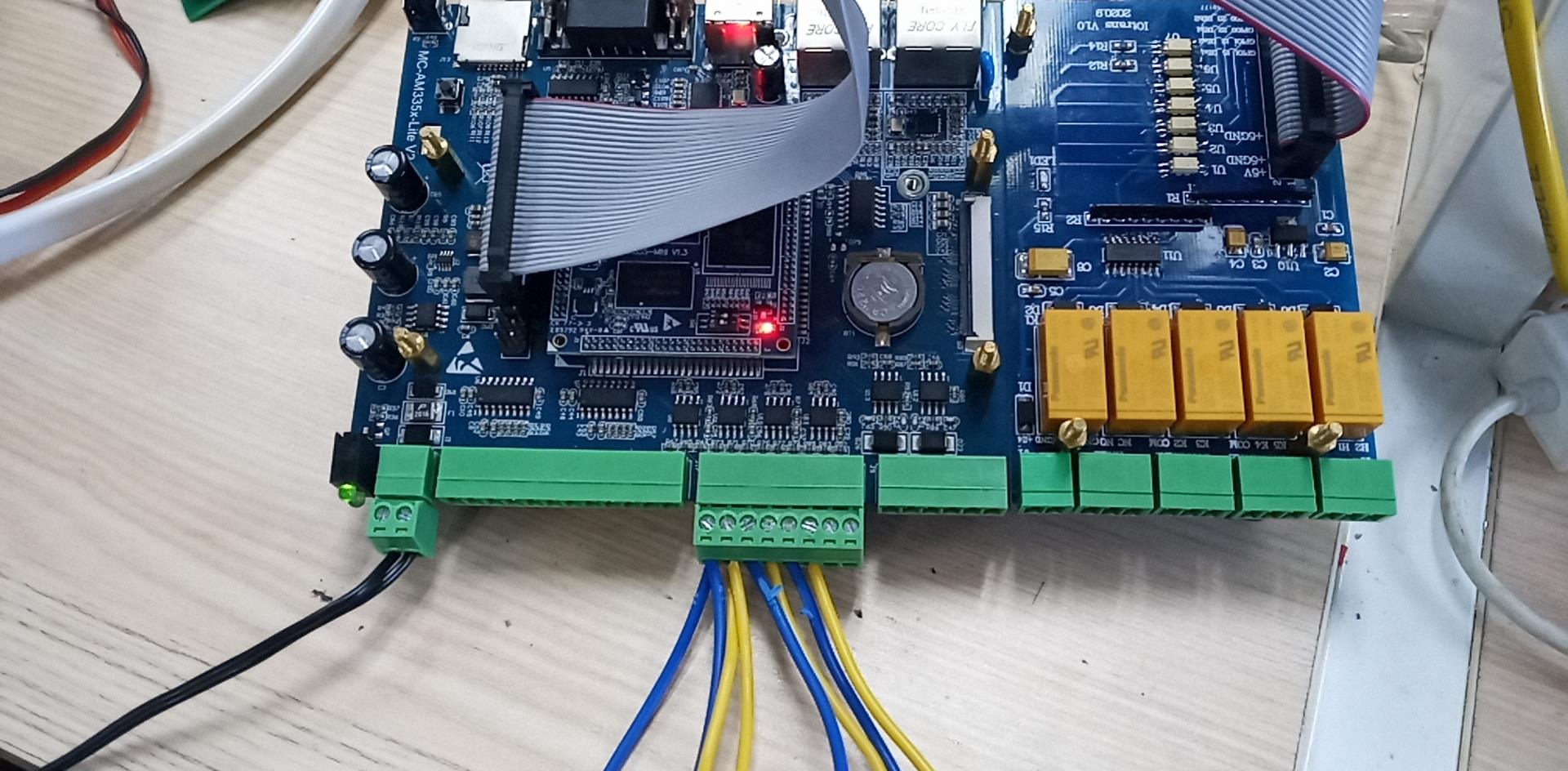
3、ARM设备进行线缆连接
1、将板卡上的485线缆进行连接,串口1的A和串口2的A连接,串口1的B和串口2的B连接,485不是AB交叉连接的,A对A,B对B
2、我的板卡有4个485口,我使用了1个发送,2个接收。
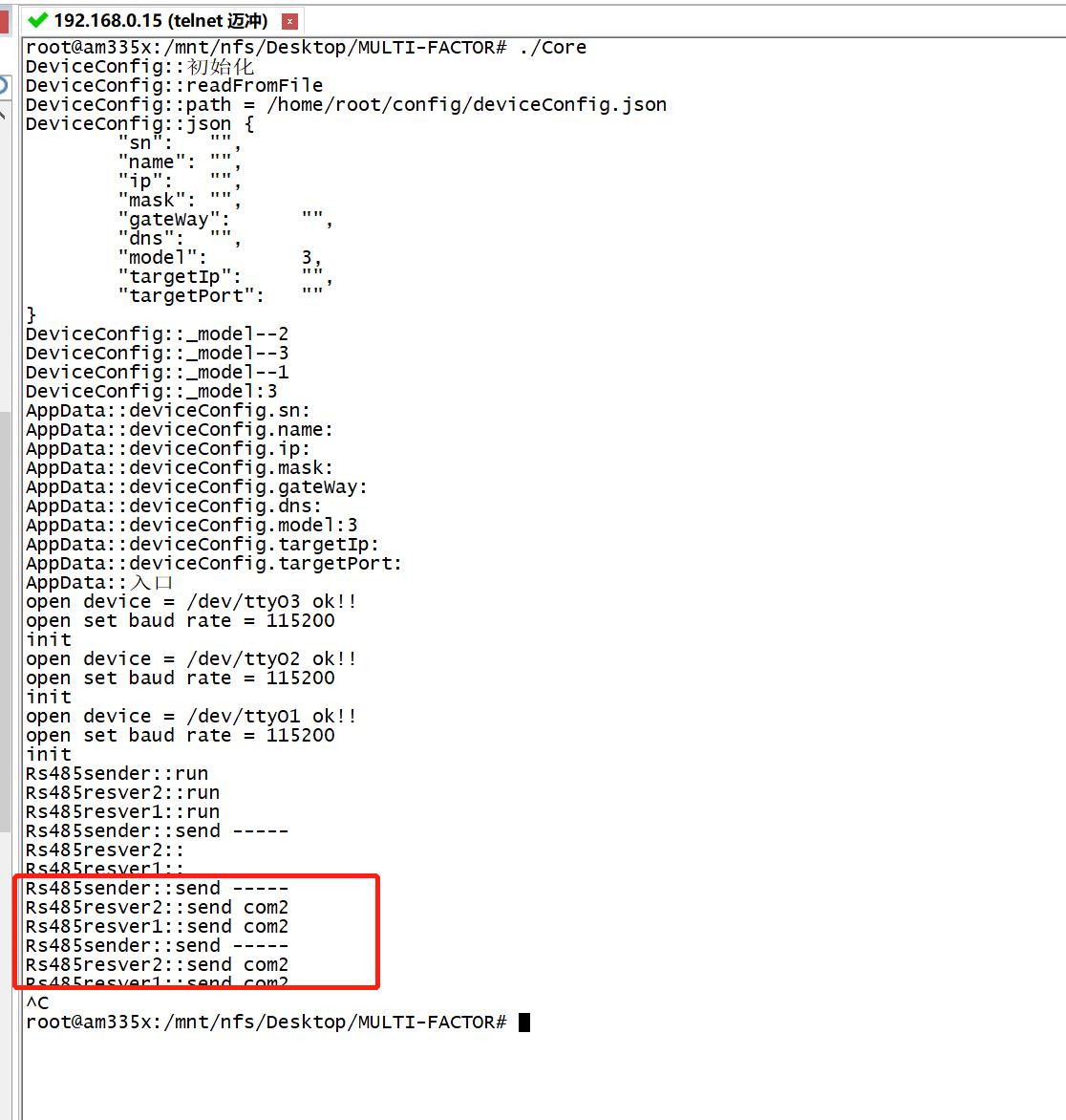
4、运行代码测试:
可以看到,Rs485sender发送数据Rs485resver1、Rs485resver2收到数据。
以上是关于Arm Qt 实战一:简单使用Arm设备的串口的主要内容,如果未能解决你的问题,请参考以下文章