烧录Py-apple Dynamics到控制器中
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了烧录Py-apple Dynamics到控制器中相关的知识,希望对你有一定的参考价值。
烧录Py-apple Dynamics
1 前言
在完成了硬件的准备和开发环境的配置之后,我们就可以烧录Py-apple Dynamics的开源代码到控制器中,进而完成四足机器人的所有软件配置。
烧录的方法主要由2,一个是采用 Py-apple Dynamics Dev Tool 烧录,而另一个方法则较为原始,直接通过前面提到的 UpyCraft 软件烧录。
2 采用 Py-apple Dynamics Dev Tool 烧录
Py-apple Dynamics Dev Tool 是由灯哥开发的,可以一站式完成快速配置菠萝狗系列四足机器人的软件,界面如下:
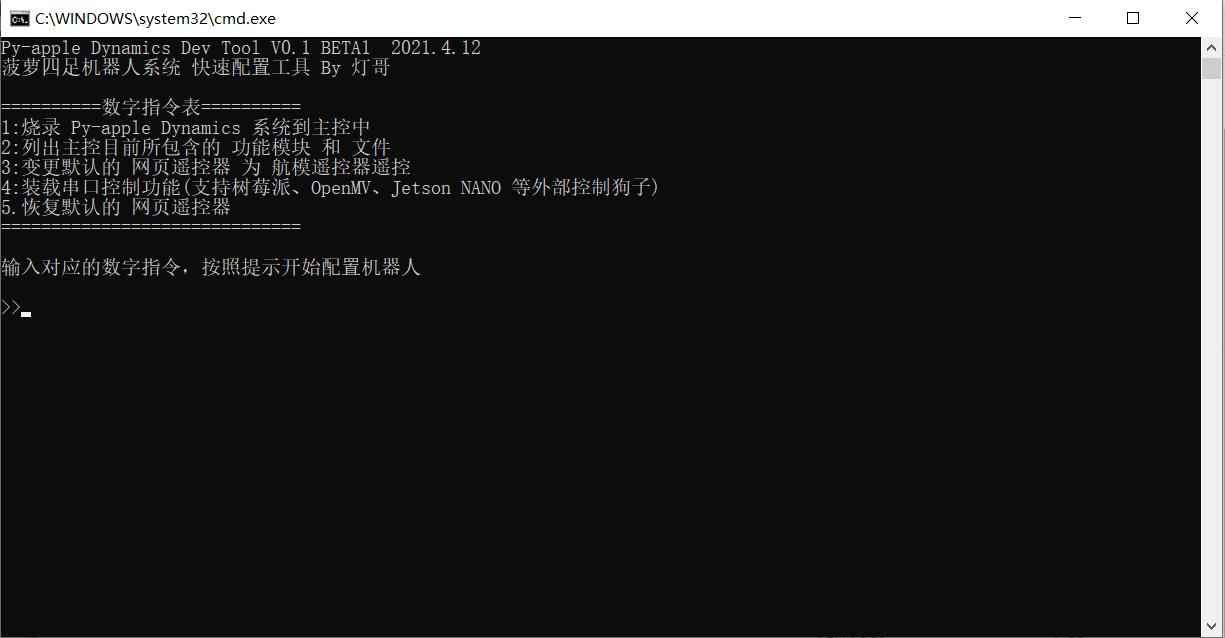
只需要输入对应的数字,按照提示,就可以完成四足机器人的前期MicroPython环境配置和软件烧录。点击下载 Py-apple Dynamics Dev Tool
要完成烧录,下载解压文件包,接着点击文件包其中的 Py-apple Dynamics Dev Tool V0.1 BETA.bat ,等待其中pip自动更新完成,出现提示时,按Y直接通过(此步骤需联网),完成后,输入数字1
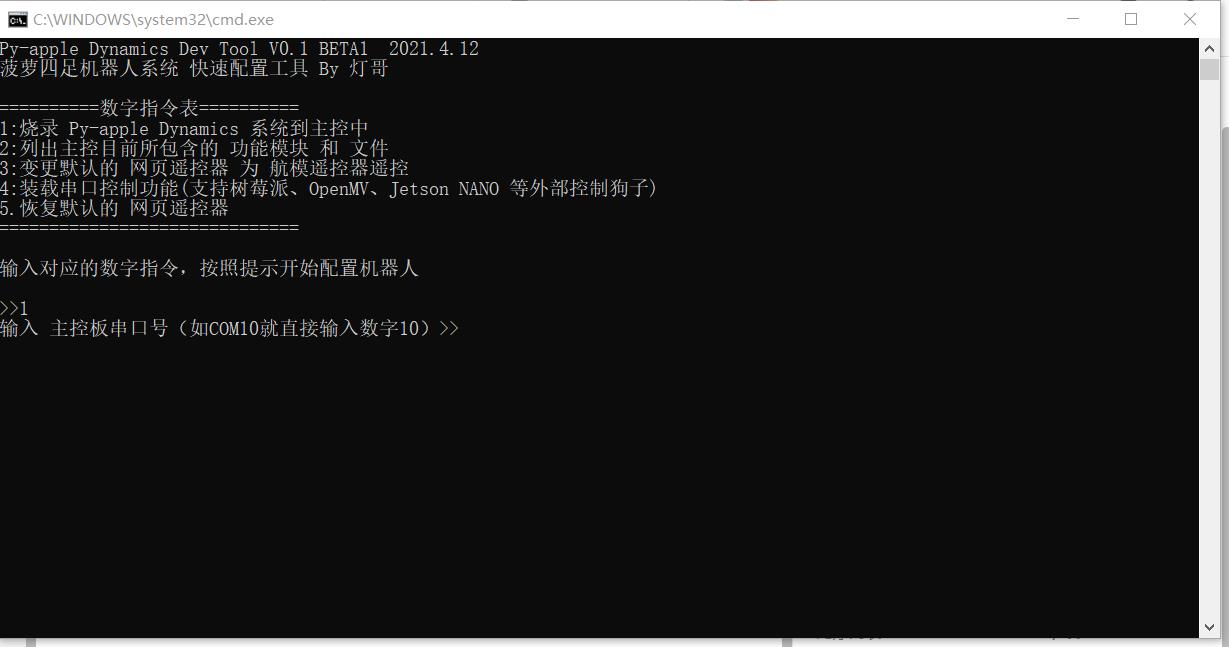
输入完数字之后,接下来你要输入你的控制板的串口号,控制板串口号可以在设备管理器中进行查看,查看完成后,输入对应数字即可。
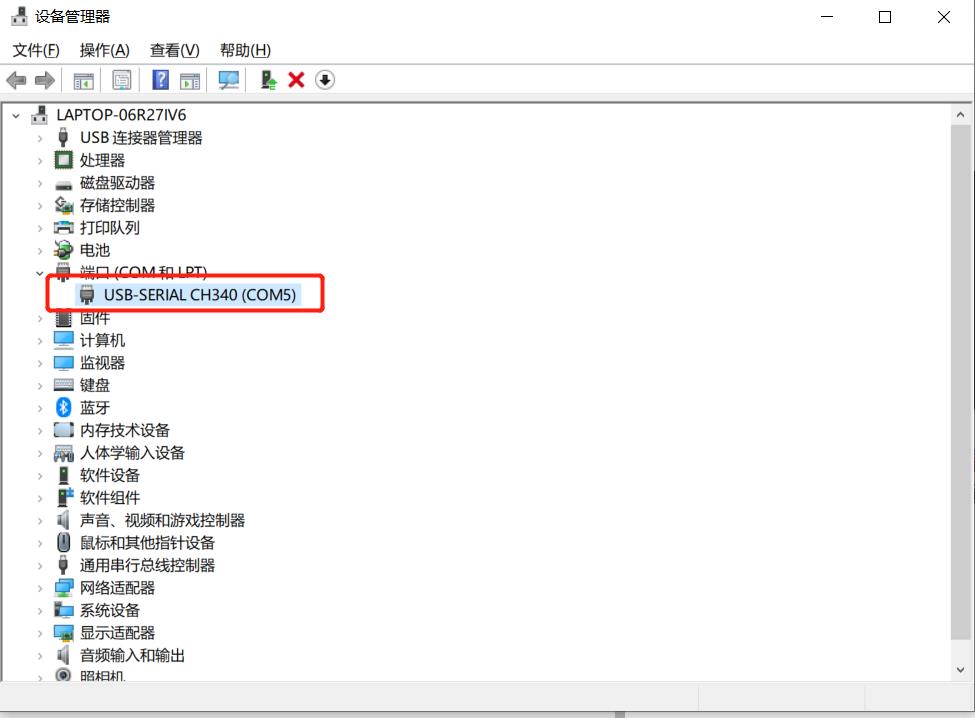
在这里,串口号为 COM5 ,因此,在控制台中输入 5。然后,根据提示,输入四足机器人的自由度数目,比如,当你的机械结构为8自由度时,输入8;12自由度时,输入12。(目前该软件暂时只支持8自由度)
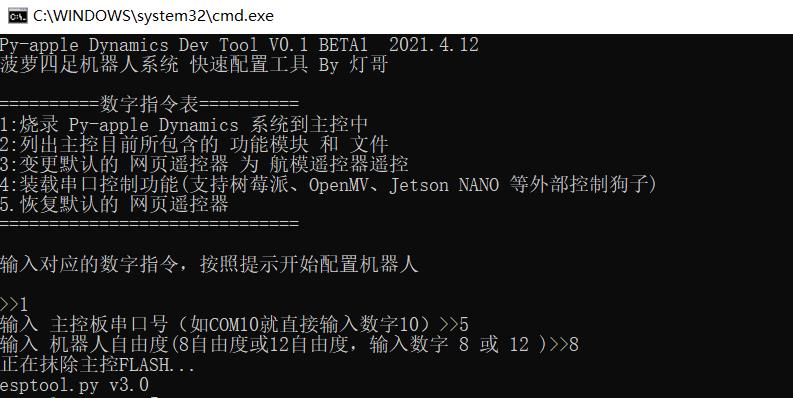
完成输入后,软件自动抹除FLASH,烧录四足机器人 MicroPython 编程环境,并且烧录四足机器狗程序文件。烧录完成后,显示如下:
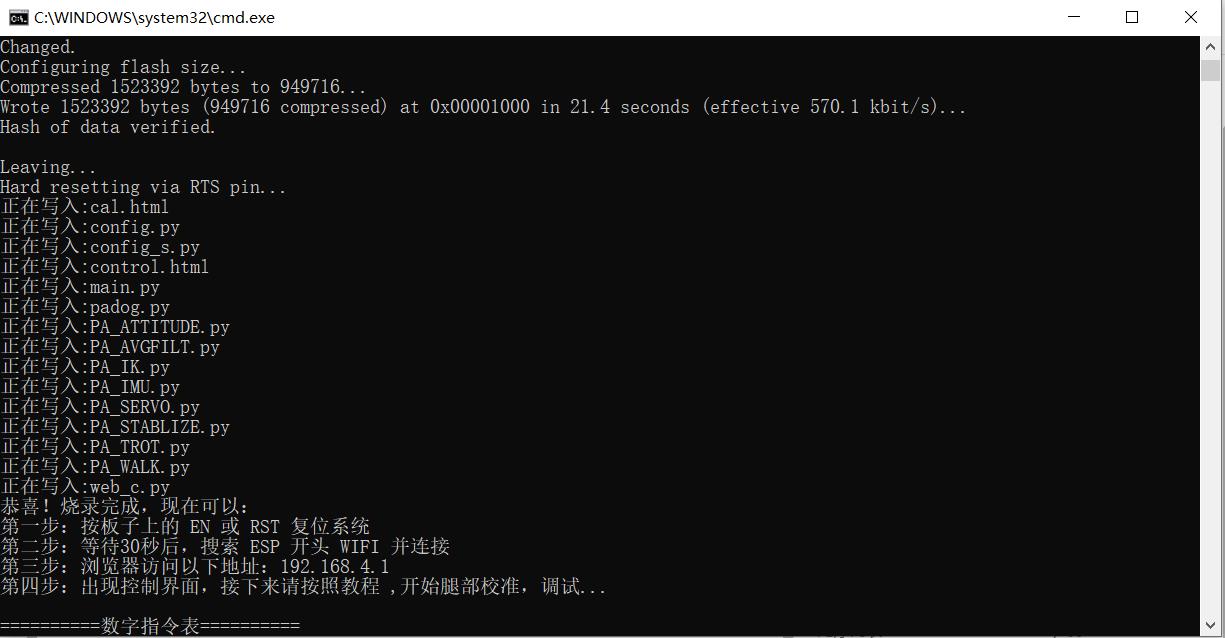
完成烧录后,按动四足机器狗控制板上的RST按钮(直插板子)或者是EN按钮(集成板子),复位板子,等待30S后,可以用电脑/手机搜索到ESP开头的WIFi(你搜索到的WIFI后缀不一定和我一样是6898E9,每个ESP板子都会有独立的后缀编号)。

成功连接后,按照提示在网页中访问192.168.4.1,即可访问控制界面,进行下一步的配置。

以上就是采用 Py-apple Dynamics Dev Tool 的程序烧录方法,方便快捷,直接完成所有文件的和环境的烧录,可以直接开展使用。而 Py-apple Dynamics Dev Tool还有更多的功能,后续也会为有新的文章为大家一一进行介绍。
3 采用 UpyCraft 烧录
UpyCraft 的烧录方式是传统的 micropython 平台程序烧录方式之一,利用它也可以进行烧录,不过过程会稍微繁杂一些。在这里也对应做出说明。
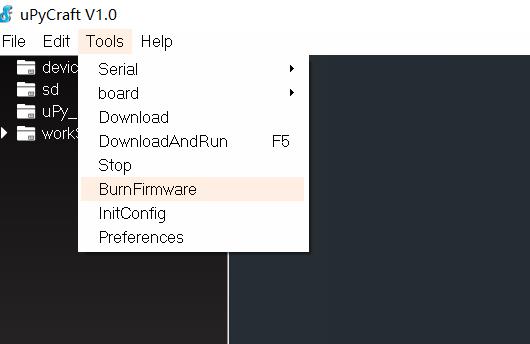
首先打开UpyCraft软件,点击 BurnFirmware选项
接着,出现如下界面
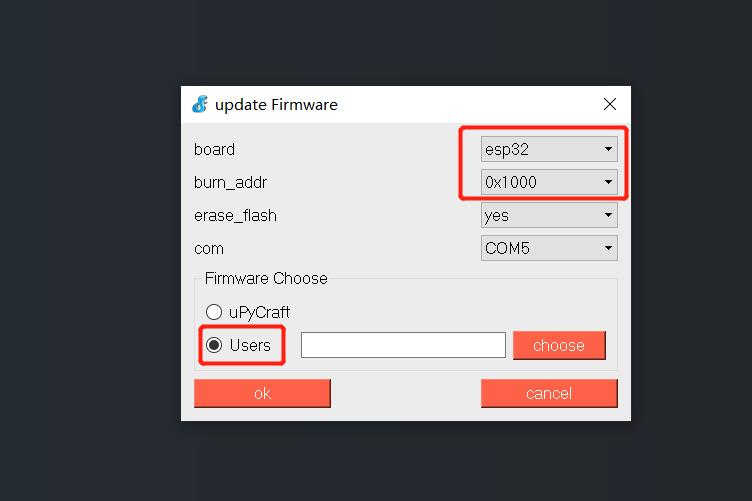
按照红色框中所示选择烧录参数,选择好后,串口com选择你自己在设备管理器中找到的com口;完成后,点击 choose,选择烧录环境对应的BIN文件,然后点击 OK,先烧录 MicroPython 在 ESP32 上的运行环境 esp32.bin。点击下载运行环境。
完成烧录后,点击右边的连接符号,黄色框框着的控制台界面处应该会出现 Python 的命令提示符符号,如下图。
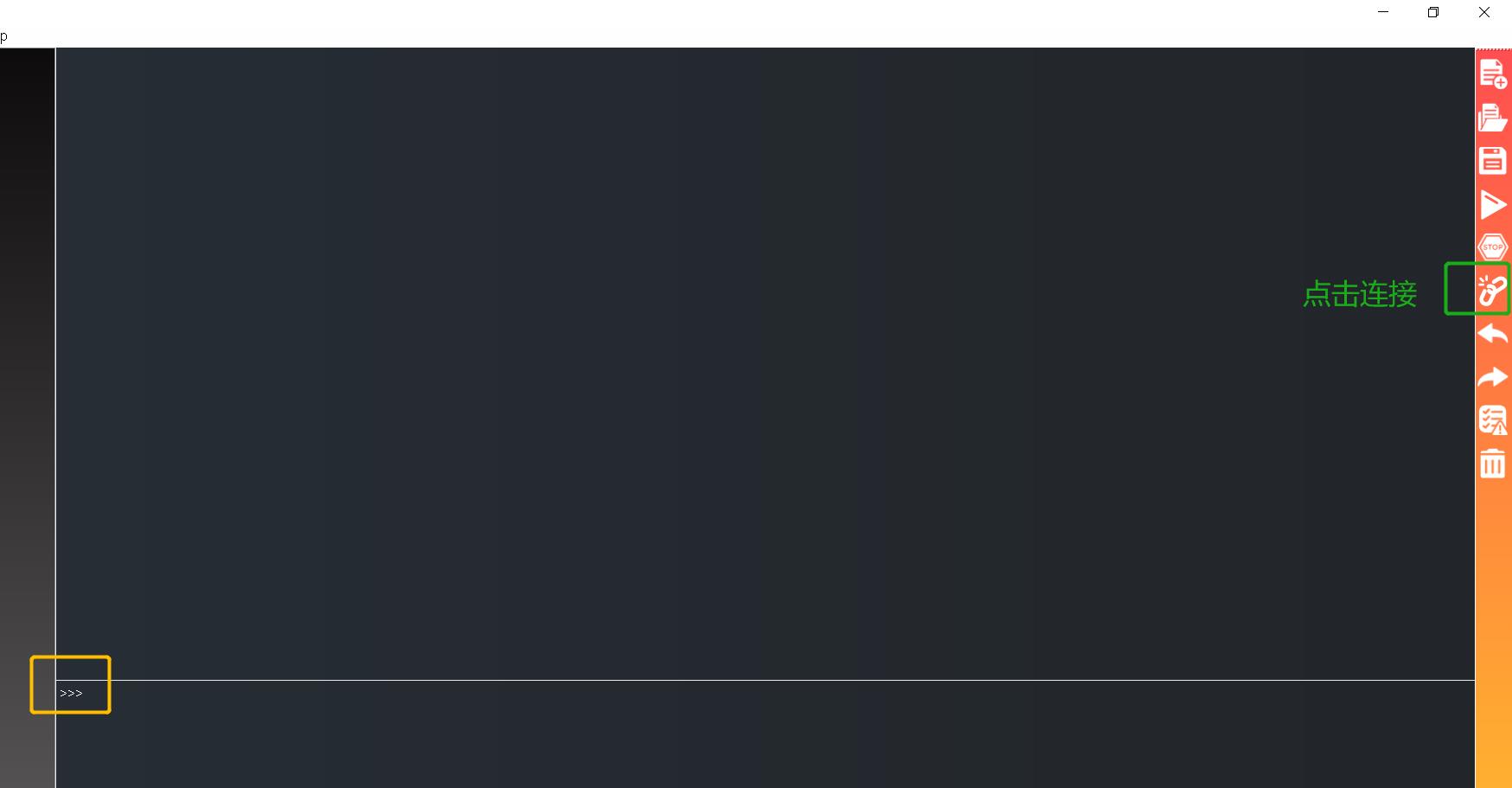
这样就代表 Micropython 环境烧录完成。接下来,就可以对程序文件进行烧录。
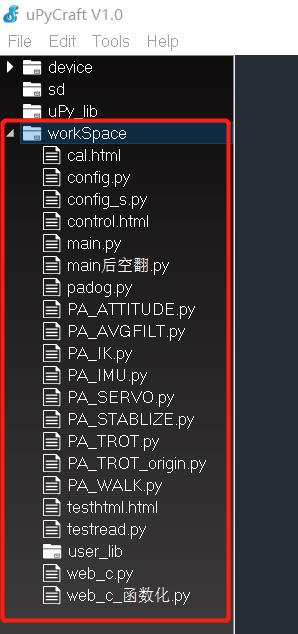
烧录程序文件,首先你要下载程序文件(所有的.py文件都要下载) 点击下载,接着把这些文件放在WorkSpace中(在Workspace文件夹上右键,点击Open,然后选择放有你下载的代码的程序文件夹即可),完成后,如下如所示:
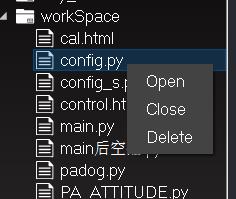
接着,在每个文件上方,通过右键–>Open,打开代码,所有的文件都打开;
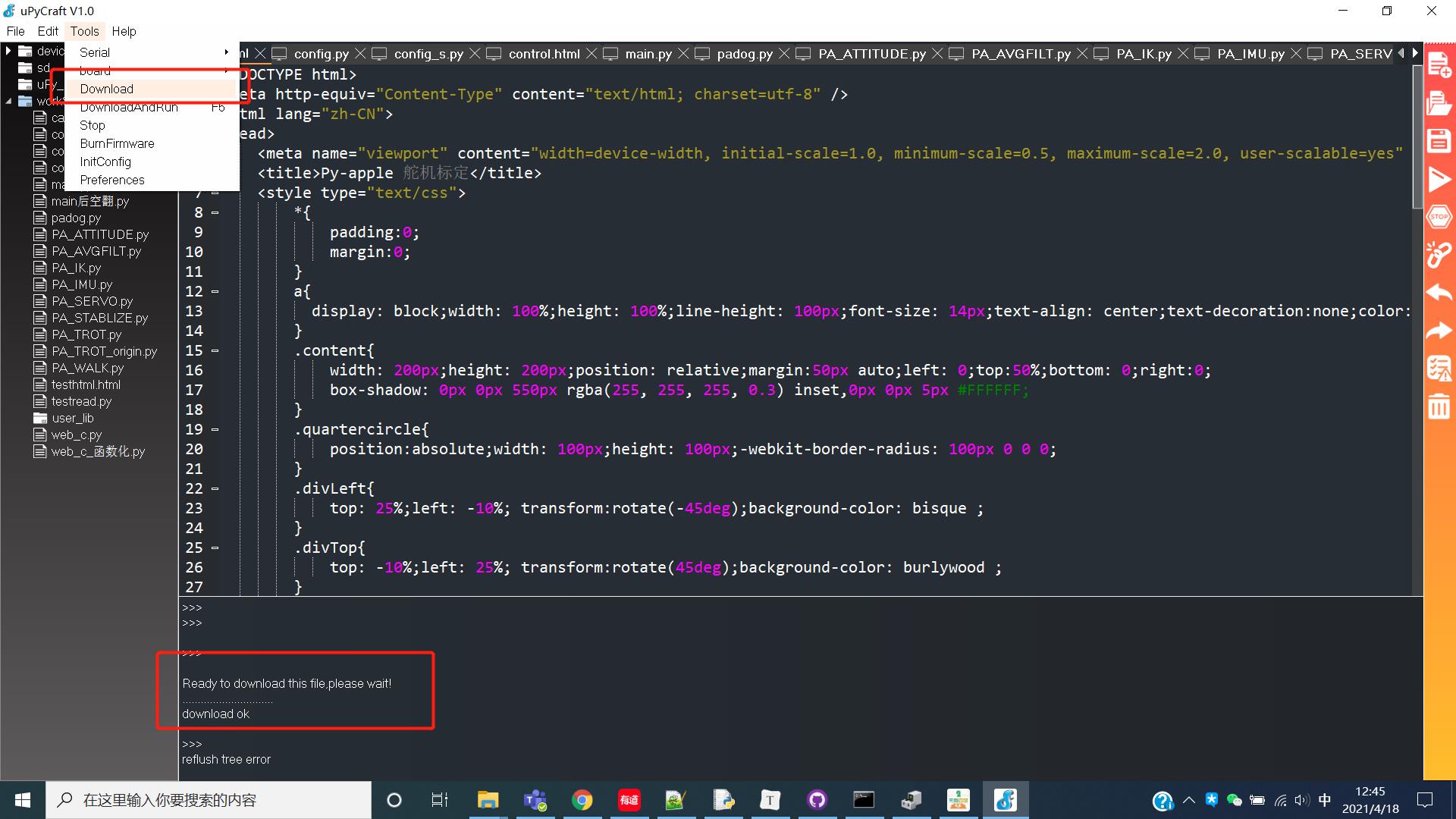
然后,如下图所示,每个文件都选择 Dowload 进主控板中即可,Download成功后,在下方控制台处会显示 Download OK,如下图红色圈圈处所示。
完成烧录后,按动四足机器狗控制板上的RST按钮(直插板子)或者是EN按钮(集成板子),复位板子,等待30S后,可以用电脑/手机搜索到ESP开头的WIFi(你搜索到的WIFI后缀不一定和我一样是6898E9,每个ESP板子都会有独立的后缀编号)。
成功连接后,按照提示在网页中访问192.168.4.1,即可访问控制界面,进行下一步的配置。
这就是烧录 Py-apple Dynamics 的过程。下节课的文章中,我将会教大家如何进行机器人的调中和校准,欢迎大家持续关注。
以上是关于烧录Py-apple Dynamics到控制器中的主要内容,如果未能解决你的问题,请参考以下文章