使用NWPU VHR-10数据集训练Faster R-CNN模型
Posted 大彤小忆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用NWPU VHR-10数据集训练Faster R-CNN模型相关的知识,希望对你有一定的参考价值。
使用Faster R-CNN算法在NWPU VHR-10数据集上实现目标检测。
使用Faster R-CNN算法在VOC2007数据集上实现目标检测的详细步骤→Windows10+Faster-RCNN-TensorFlow-Python3-master+VOC2007数据集。
一、所需文件下载链接
- Faster R-CNN源码及操作步骤Github链接→Faster-RCNN-TensorFlow-Python3。
- Faster-RCNN-TensorFlow-Python3-master压缩包百度云盘链接→提取码:76wq。
- NWPU VHR-10数据集百度云盘链接→提取码:1iam。
二、基础环境配置
- Windows10 + Anaconda3 + PyCharm 2019.3.3
- 安装CPU版本的TensorFlow
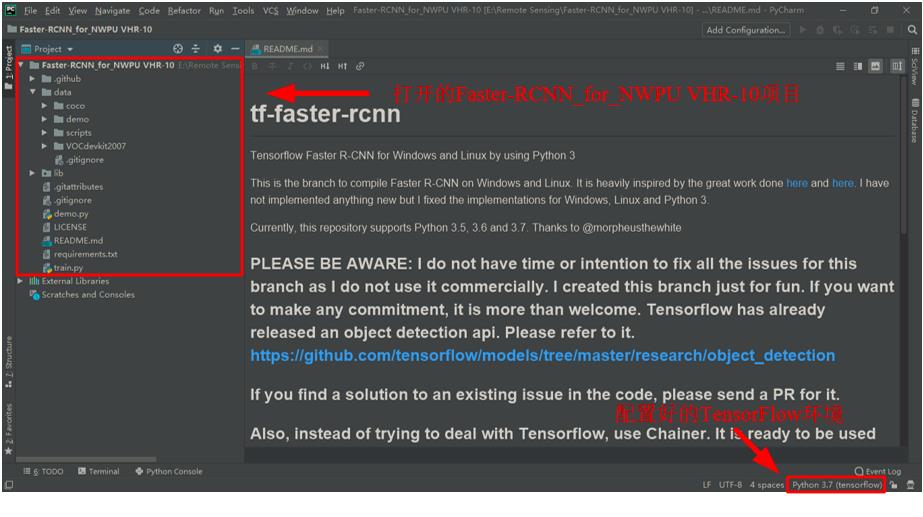
- 在PyCharm中配置好TensorFlow环境
三、训练及测试过程
-
下载并解压
Faster-RCNN-TensorFlow-Python3-master.zip,将文件夹重命名为Faster-RCNN_for_NWPU VHR-10。

-
将NWPU VHR-10数据集的格式转换成VOC2007数据集的的格式,并将转换好的数据集文件夹复制到
./Faster-RCNN_for_NWPU VHR-10/data路径下。

-
在配置好TensorFlow环境的PyCharm中打开
Faster-RCNN_for_NWPU VHR-10项目。
-
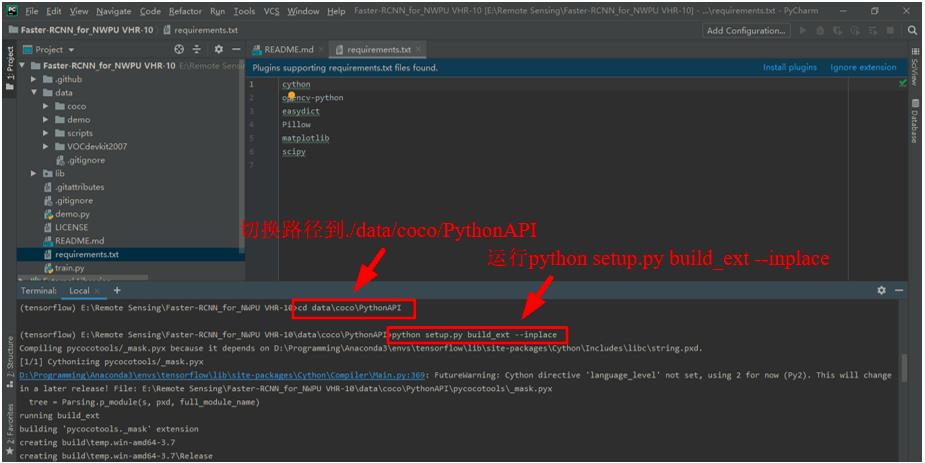
安装源码运行需要的Python包。打开好的Faster-RCNN_for_NWPU VHR-10项目中有一个
requirement.txt文件,其中记录了需要安装的包的名字。在PyCharm的终端Terminal中输入pip install -r requirements.txt后回车,安装需要的所有依赖包。

-
在PyCharm的终端Terminal中输入
cd data\\coco\\PythonAPI切换路径到./data/coco/PythonAPI,然后输入python setup.py build_ext --inplace并回车。
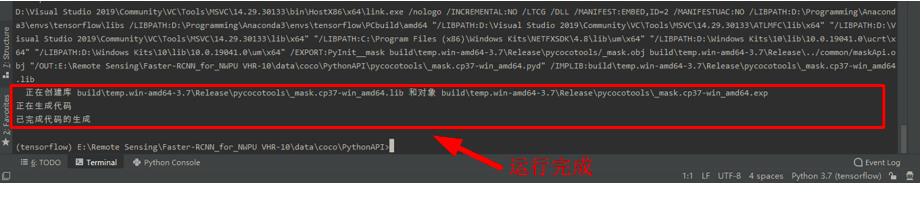
再输入python setup.py build_ext install并回车。


-
在PyCharm的终端Terminal中输入
exit退出当前路径,然后输入cd lib\\utils切换路径到./lib/utils,再输入python setup.py build_ext --inplace并回车。


-
下载预训练模型VGG16,在
./data文件夹下新建文件夹imagenet_weights,将下载好的vgg_16_2016_08_28.tar.gz解压到./data/imagenet_weights路径下,并将vgg_16.ckpt重命名为vgg16.ckpt。

-
修改
config.py文件。在./lib/config文件夹下的config.py文件,是专门的配置文件,其中定义了模型的诸多参数,大家可以根据自己的需要修改相关参数。在这里,为了减少训练时间,我将最大迭代次数max_iters参数由40000改为10000,同时将迭代多少次保存一次模型snap_iterations参数由5000改为2000,其他参数未作改变。

-
修改
pascal_voc.py文件。在./lib/datasets文件夹下的pascal_voc.py文件,修改self._classes中指定的检测类别为NWPU VHR-10数据集的10个目标检测类别。
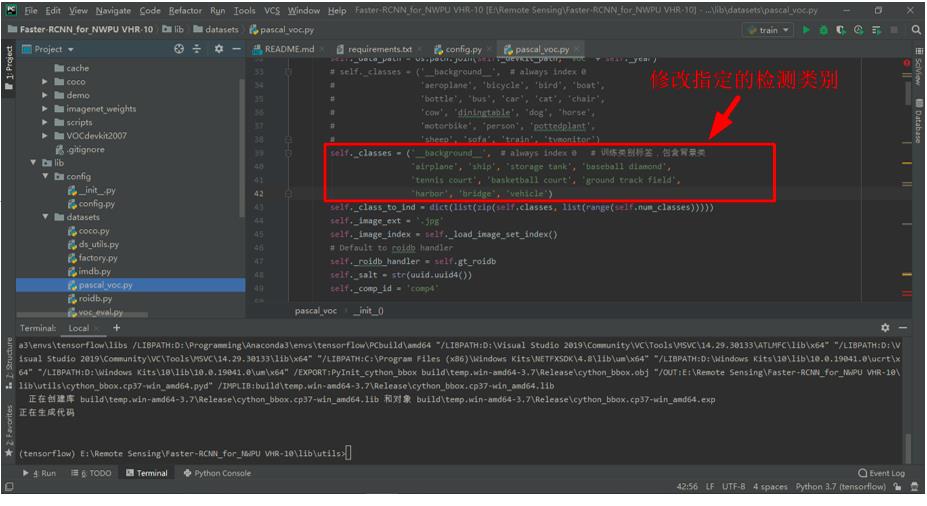
修改的代码如下所示。
self._classes = ('__background__', # always index 0 # 训练类别标签,包含背景类
'airplane', 'ship', 'storage tank', 'baseball diamond',
'tennis court', 'basketball court', 'ground track field',
'harbor', 'bridge', 'vehicle')
- 在PyCharm中打开
train.py文件 ,如果后面想要可视化loss的话,需要在如下图所示的两处添加代码,如果不需要的话,可忽略这一步。


添加的代码如下所示。
filename = './write_loss.txt' # 添加的代码(保存loss的文件)
# 添加的代码(可视化loss)
fw = open(filename, 'a')
fw.write(str(int(iter))+' '+str(float('%.4f' % total_loss))+"\\n")
fw.close()
# 添加结束
-
在
train.py文件界面,右击后点击Run 'train',开始训练。需要注意的是,每次训练前都要清空./data/cache和./default/voc_2007_trainval/default文件夹里面的文件。

-
在训练过程中可能会出现
total loss=nan的情况,如下图所示。
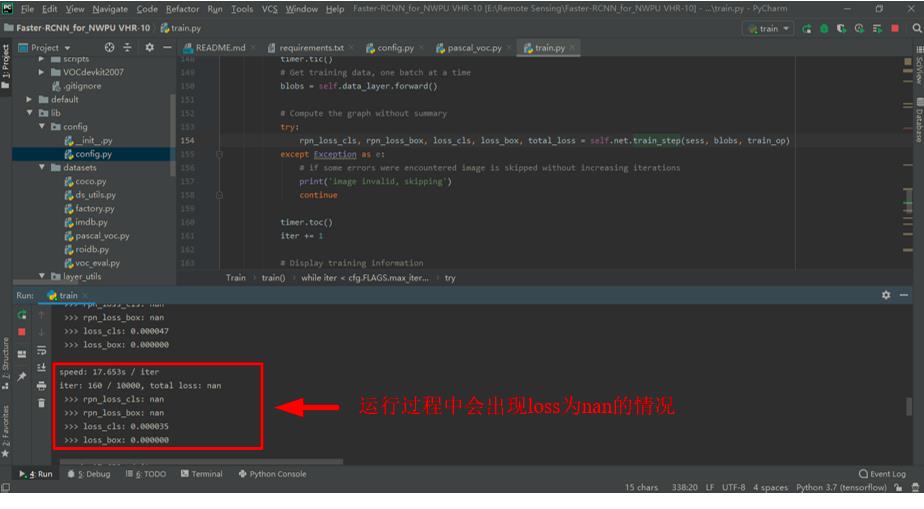
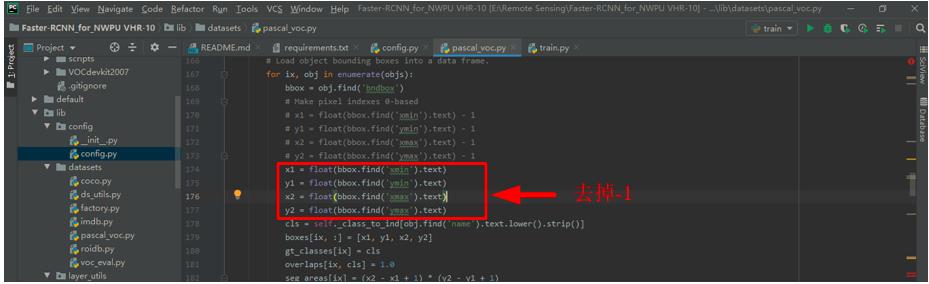
解决方案是将pascal_voc.py文件中的x1、x2、y1、y2变量的-1去掉。
也可能出现image invalid, skipping的问题,如下图所示。

解决方案是将config.py中的roi_bg_threshold_low的值改为0.0。

-
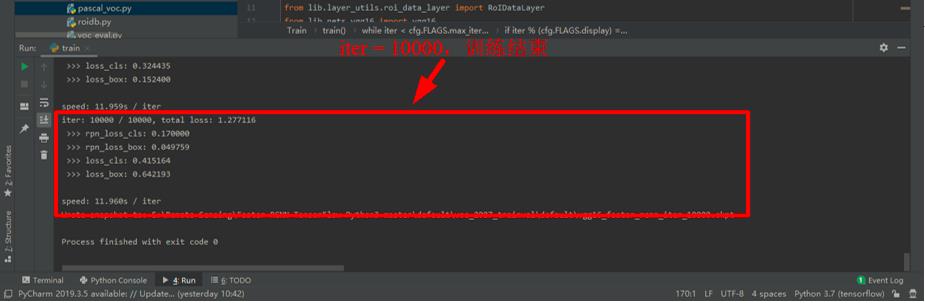
清空
./data/cache和./default/voc_2007_trainval/default文件夹里面的文件。在train.py文件界面,右击后点击Run 'train',重新开始训练,直到迭代次数为10000。
-
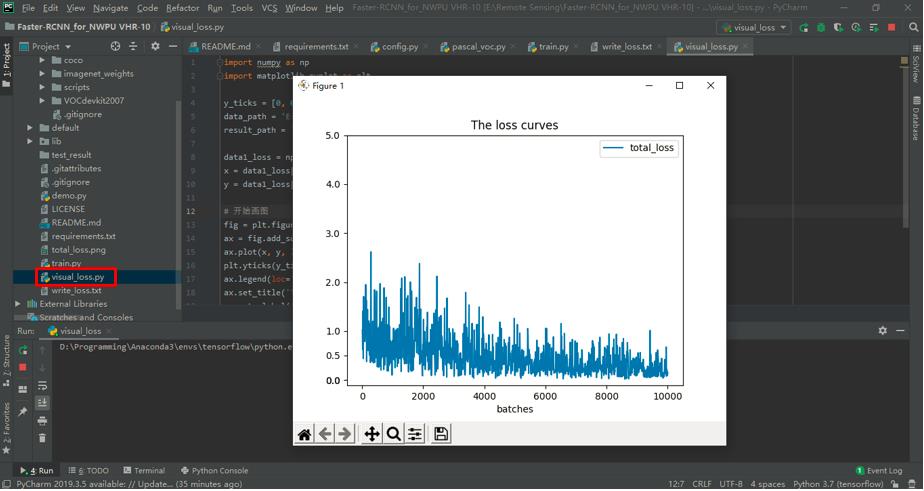
训练结束后,如果训练前在
train.py文件中加了可视化loss的代码的话,可以在根路径下得到一个write_loss.txt文件,保存着每迭代10次对应的损失值。在根路径下新建一个Python文件visual_loss.py,代码如下,运行后可以在根目录下得到一张loss曲线图。
write_loss.txt文件文件内容如下图所示。

运行visual_loss.py文件,可得如下图所示的结果。
visual_loss.py文件的代码如下所示。
import numpy as np
import matplotlib.pyplot as plt
y_ticks = [0, 0, 0.5, 1.0, 2.0, 3.0, 4.0, 5.0] # 纵坐标的值,可以自己设置。
data_path = 'E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/write_loss.txt' # log_loss的路径
result_path = 'E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/total_loss' # 保存结果的路径
data1_loss = np.loadtxt(data_path)
x = data1_loss[:, 0] # 冒号左边是行范围,冒号右边列范围,取第一列
y = data1_loss[:, 1] # 取第2列
# 开始画图
fig = plt.figure()
ax = fig.add_subplot(1, 1, 1)
ax.plot(x, y, label='total_loss')
plt.yticks(y_ticks) # 如果不想自己设置纵坐标,可以注释掉
ax.legend(loc='best')
ax.set_title('The loss curves')
ax.set_xlabel('batches')
fig.savefig(result_path)
plt.show()
-
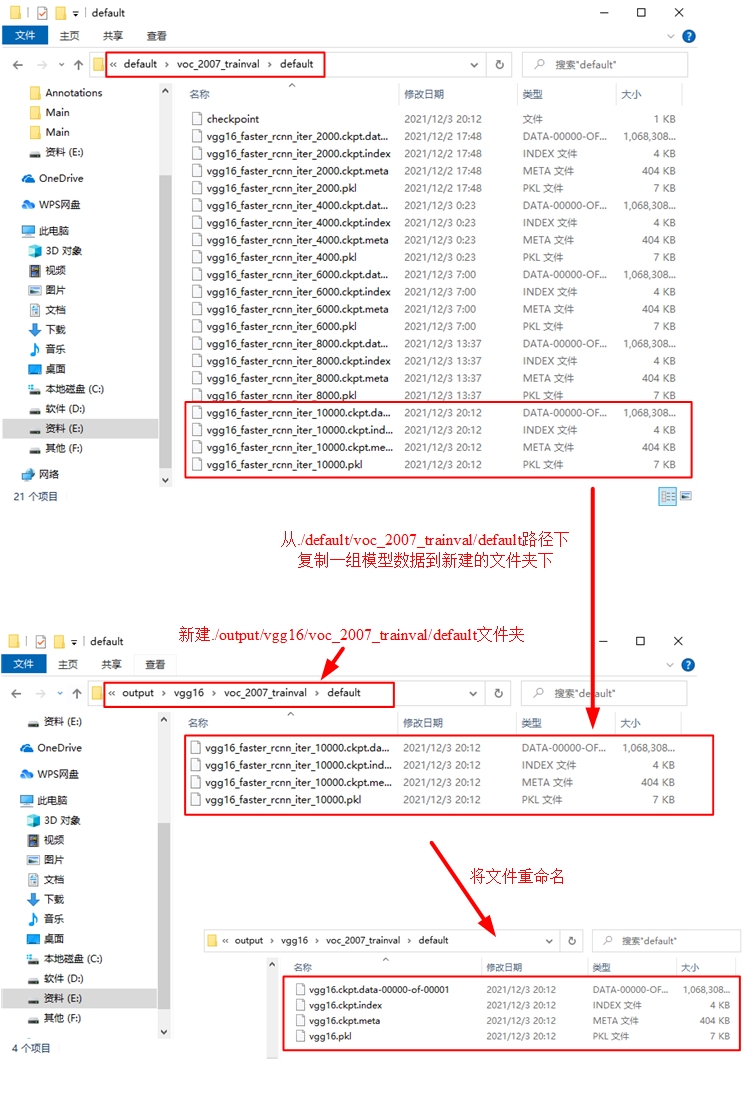
训练时,模型保存的路径是
./default/voc_2007_trainval/default,每次保存模型都是保存4个文件。

-
新建
./output/vgg16/voc_2007_trainval/default文件夹,从./default/voc_2007_trainval/default路径下复制一组模型数据到新建的文件夹下,并将所有文件名改为vgg16.后缀。
-
准备开始测试已经训练好的模型。在PyCharm中打开
demo.py文件,并对如下图所示的部分进行修改。
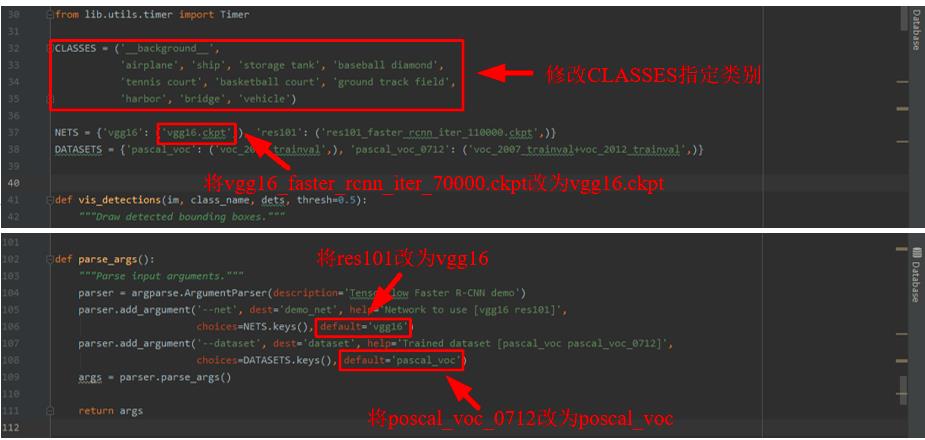
修改的代码如下所示。
CLASSES = ('__background__',
'airplane', 'ship', 'storage tank', 'baseball diamond',
'tennis court', 'basketball court', 'ground track field',
'harbor', 'bridge', 'vehicle')
NETS = 'vgg16': ('vgg16.ckpt',), 'res101': ('res101_faster_rcnn_iter_110000.ckpt',)
parser.add_argument('--net', dest='demo_net', help='Network to use [vgg16 res101]',
choices=NETS.keys(), default='vgg16')
parser.add_argument('--dataset', dest='dataset', help='Trained dataset [pascal_voc pascal_voc_0712]',
choices=DATASETS.keys(), default='pascal_voc')
- 为使得同一张图片上的所有目标检测框全部在一张图片上显示出来,需要修改
demo.py文件如下所示的部分。




修改的代码如下所示。
# def vis_detections(im, class_name, dets, thresh=0.5): # 修改这行代码为下面这行
def vis_detections(im, class_name, dets, ax, thresh=0.5): # 添加的代码(增加ax参数)(将同一张图片上的所有目标检测框全部在一张图片上显示)
"""Draw detected bounding boxes."""
inds = np.where(dets[:, -1] >= thresh)[0]
if len(inds) == 0:
return
# 注释的代码(将同一张图片上的所有目标检测框全部在一张图片上显示)
# im = im[:, :, (2, 1, 0)]
# fig, ax = plt.subplots(figsize=(12, 12))
# ax.imshow(im, aspect='equal')
# 注释结束
for i in inds:
bbox = dets[i, :4]
score = dets[i, -1]
ax.add_patch(
plt.Rectangle((bbox[0], bbox[1]),
bbox[2] - bbox[0],
bbox[3] - bbox[1], fill=False,
edgecolor='red', linewidth=3.5)
)
ax.text(bbox[0], bbox[1] - 2,
':s :.3f'.format(class_name, score),
bbox=dict(facecolor='blue', alpha=0.5),
fontsize=14, color='white')
ax.set_title((' detections with '
'p( | box) >= :.1f').format(class_name, class_name,
thresh),
fontsize=14)
# 注释的代码(将同一张图片上的所有目标检测框全部在一张图片上显示)
# plt.axis('off')
# plt.tight_layout()
# plt.draw()
# 注释结束
def demo(sess, net, image_name):
"""Detect object classes in an image using pre-computed object proposals."""
# Load the demo image
im_file = os.path.join(cfg.FLAGS2["data_dir"], 'demo', image_name)
im = cv2.imread(im_file)
# Detect all object classes and regress object bounds
timer = Timer()
timer.tic()
scores, boxes = im_detect(sess, net, im)
timer.toc()
print('Detection took :.3fs for :d object proposals'.format(timer.total_time, boxes.shape[0]))
# Visualize detections for each class
CONF_THRESH = 0.4 # 进行适当修改
NMS_THRESH = 0.2 # 进行适当修改
# 添加的代码(复制前面注释掉的vis_detections函数中for循环之前的3行代码到此处)(将同一张图片上的所有目标检测框全部在一张图片上显示)
im = im[:, :, (2, 1, 0)]
fig, ax = plt.subplots(figsize=(12, 12))
ax.imshow(im, aspect='equal')
# 添加结束
for cls_ind, cls in enumerate(CLASSES[1:]):
cls_ind += 1 # because we skipped background
cls_boxes = boxes[:, 4 * cls_ind:4 * (cls_ind + 1)]
cls_scores = scores[:, cls_ind]
dets = np.hstack((cls_boxes,
cls_scores[:, np.newaxis])).astype(np.float32)
keep = nms(dets, NMS_THRESH)
dets = dets[keep, :]
# vis_detections(im, cls, dets, thresh=CONF_THRESH) # 修改这行代码为下面这行
vis_detections(im, cls, dets, ax,
thresh=CONF_THRESH) # 添加的代码(将ax做为参数传入vis_detections)(将同一张图片上的所有目标检测框全部在一张图片上显示)
# 添加的代码(复制前面注释掉的vis_detections函数中for循环之后的3行代码到此处)(将同一张图片上的所有目标检测框全部在一张图片上显示)
plt.axis('off')
plt.tight_layout()
plt.draw()
# 添加结束
- 为了在测试时可以批量读取文件夹
JPEGImages中的图片,并将目标检测结果保存到一个新建文件夹中,需要修改demo.py文件如下所示的部分。


修改的代码如下所示。
# im_file = os.path.join(cfg.FLAGS2["data_dir"], 'demo', image_name)
im_file = os.path.join('E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/data/VOCdevkit2007/VOC2007/JPEGImages', image_name) # 修改测试图片路径
# im_names = ['000456.jpg', '000457.jpg', '000542.jpg', '001150.jpg',
# '001763.jpg', '004545.jpg']
im_names = os.listdir(
'E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/data/VOCdevkit2007/VOC2007/JPEGImages') # 需要进行测试的图片的路径
for im_name in im_names:
print('~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~')
print('Demo for data/demo/'.format(im_name))
demo(sess, net, im_name)
# 保存测试图片目标检测结果,并设置输出格式
plt.savefig('E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/test_result/' + im_name, format='png',
transparent=True, pad_inches=0, dpi=300, bbox_inches='tight')
# plt.show()
-
在根路径下新建
test_result文件夹,然后运行demo.py,可在test_result文件夹中得到NWPU VHR-10数据集的目标检测结果。

-
上述代码的运行结果,对于目标比较多且集中的图片来说,得到的目标检测可视化结果看起来不是很美观。如下图所示,甚至某一个目标的类别及精度标签会覆盖其他目标的预测框。
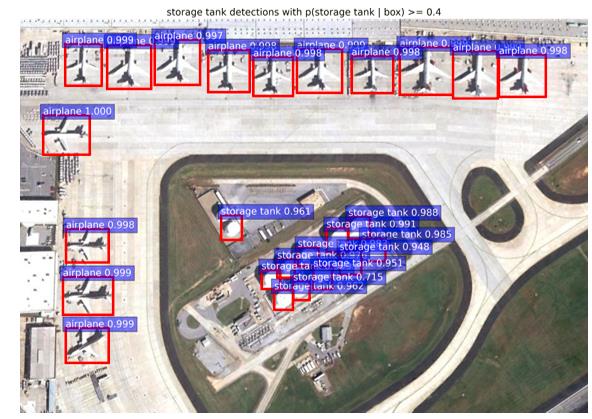
所以为了得到更好的可视化结果,继续对demo.py文件进行如下修改。

修改目标检测结果的保存路径。

在根路径下新建test_result1文件夹,然后运行demo.py,可在test_result1文件夹中重新得到NWPU VHR-10数据集的目标检测结果。

对于目标比较多且集中的图片来说,这次得到的目标检测可视化结果看起来就比较美观了,如下图所示。

-
如果想要在测试时输出PR曲线并计算AP值的话,首先需要在
.\\lib\\datasets路径下打开pascal_voc.py文件,做如下修改。


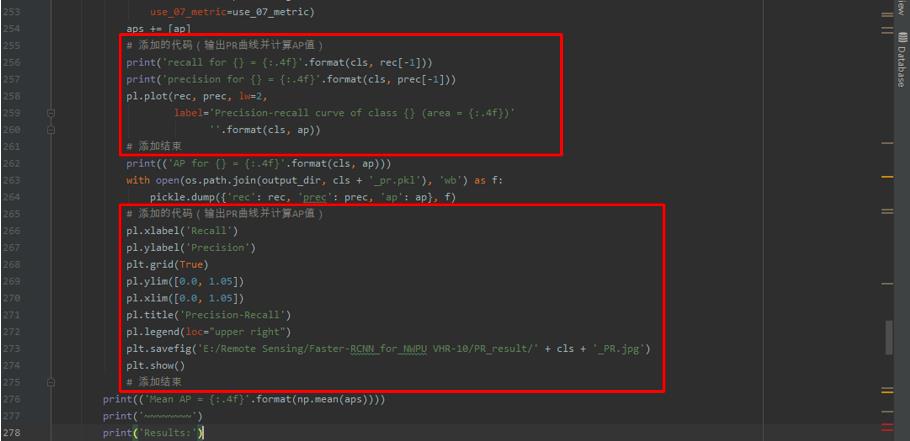
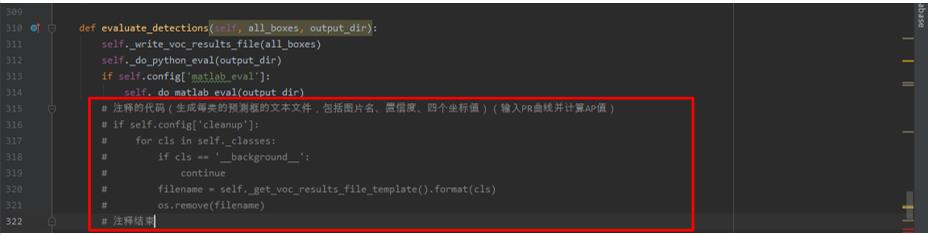
修改和添加的代码如下所示。
# 添加的代码(输出PR曲线并计算AP值)
import matplotlib.pyplot as plt
import pylab as pl
# 添加结束
# filename = self._get_comp_id() + '_det_' + self._image_set + '_:s.txt' # 修改这行代码为下面这行
filename = self._image_set + '_:s' # 添加的代码(输出PR曲线并计算AP值)
def _do_python_eval(self, output_dir='output'):
annopath = self._devkit_path + '\\\\VOC' + self._year + '\\\\Annotations\\\\' + ':s.xml'
imagesetfile = os.path.join(
self._devkit_path,
'VOC' + self._year,
'ImageSets',
'Main',
self._image_set + '.txt')
cachedir = os.path.join(self._devkit_path, 'annotations_cache')
aps = []
# The PASCAL VOC metric changed in 2010
use_07_metric = True if int(self._year) < 2010 else False
print('VOC07 metric? ' + ('Yes' if use_07_metric else 'No'))
if not os.path.isdir(output_dir):
os.mkdir(output_dir)
for i, cls in enumerate(self._classes):
if cls == '__background__':
continue
filename = self._get_voc_results_file_template().format(cls)
rec, prec, ap = voc_eval(
filename, annopath, imagesetfile, cls, cachedir, ovthresh=0.5,
use_07_metric=use_07_metric)
aps += [ap]
# 添加的代码(输出PR曲线并计算AP值)
print('recall for = :.4f'.format(cls, rec[-1]))
print('precision for = :.4f'.format(cls, prec[-1]))
pl.plot(rec, prec, lw=2,
label='Precision-recall curve of class (area = :.4f)'
''.format(cls, ap))
# 添加结束
print(('AP for = :.4f'.format(cls, ap)))
with open(os.path.join(output_dir, cls + '_pr.pkl'), 'wb') as f:
pickle.dump('rec': rec, 'prec': prec, 'ap': ap, f)
# 添加的代码(输出PR曲线并计算AP值)
pl.xlabel('Recall')
pl.ylabel('Precision')
plt.grid(True)
pl.ylim([0.0, 1.05])
pl.xlim([0.0, 1.05])
pl.title('Precision-Recall')
pl.legend(loc="upper right")
plt.savefig('E:/Remote Sensing/Faster-RCNN_for_NWPU VHR-10/PR_result/' + cls + '_PR.jpg')
plt.show()
# 添加结束
print(('Mean AP = :.4f'.format(np.mean(aps))))
print('~~~~~~~~')
print('Results:')
for ap in aps:
print((':.3f'.format(ap)))
print((':.3f'.format(np.mean(aps))))
print('~~~~~~~~')
print('')
print('--------------------------------------------------------------')
print('Results computed with the **unofficial** Python eval code.'