多视几何:摄像机模型的推导
Posted tina_ttl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多视几何:摄像机模型的推导相关的知识,希望对你有一定的参考价值。
多视几何:摄像机模型的推导
标签(空格分隔): 计算机视觉·多视几何
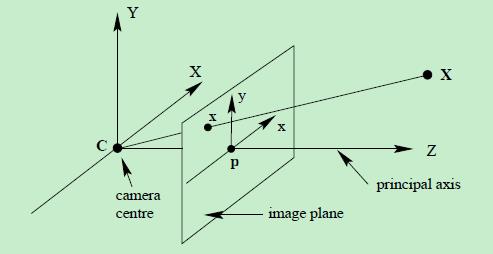
- 摄像机的作用是将3D空间点 X 映射到2D图像点
x ,而摄像机模型正是对应这个变换的矩阵P;- 摄像机模型的推导分为两个步骤: 摄像机坐标系下的点投影到图像平面–>世界坐标系下的点投影到图像平面
注:这里提到的摄像机都是针孔摄像机模型!
1. 摄像机坐标系下的点投影到图像平面
有一个空间点 X ,它在摄像机坐标系下的坐标为 (X,Y,Z)T ,即
X=(X,Y,Z)T
那么,它在图像平面中的投影点x是什么?
1.1 图像坐标系原点位于图像中心
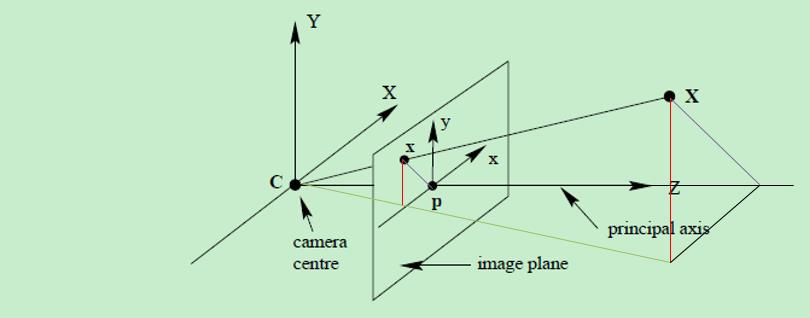
根据相似三角形,可以得到如下两式
xX=fZ和yY=fZ
从而,有
x=XZf和y=YZf
也就是说,空间中的点 (X,Y,Z) 被映射成为 (x,y)T=(XZf,YZf)T
- 对上式进行变形,可以得到
(Zx,Zy)T=(Xf,Yf)T - 也就是
(Zx,Zy,Z)T=(Xf,Yf,Z)T - 记为齐次坐标的形式
Z(x,y,1)T=(Xf,Yf,Z)T=⎡⎣⎢f000f0001000⎤⎦⎥(X,Y,Z,1)T - 即
Z(x,y,1)T=⎡⎣⎢f000f0001000⎤⎦⎥(X,Y,Z,1)T
1.2 图像坐标系原点移动到图像左下角
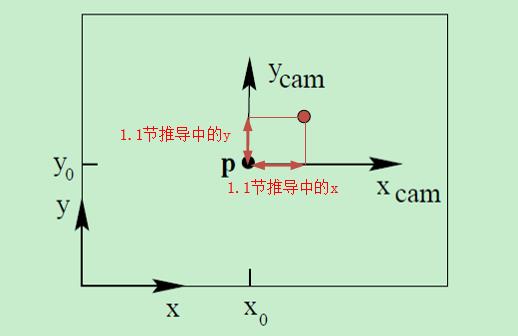
此变化对上面的推导有一个影响:上面推导的