OpenCV图像处理应用(面向Python)之图像梯度与Canny边缘检测
Posted OpenCV小课堂
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV图像处理应用(面向Python)之图像梯度与Canny边缘检测相关的知识,希望对你有一定的参考价值。
OpenCV图像处理应用(面向Python)
欢迎来到梁老湿课堂
版权声明:
作者:OpenCV小课堂
导师:Fu Xianjun
本文版权归作者导师共有,欢迎转载,但未经作者同意必须在文章页面注明来源及原作者或原文链接,否则保留追究法律责任的权利。
1.图像梯度
可以理解为: 图像梯度计算的是图像变换的速度。在图像边缘部分,灰度值变化大,那么它的梯度值也会之而变大;相反图像中比较平滑的部分,灰度值变化小,那么它的梯度值也会变化就小。
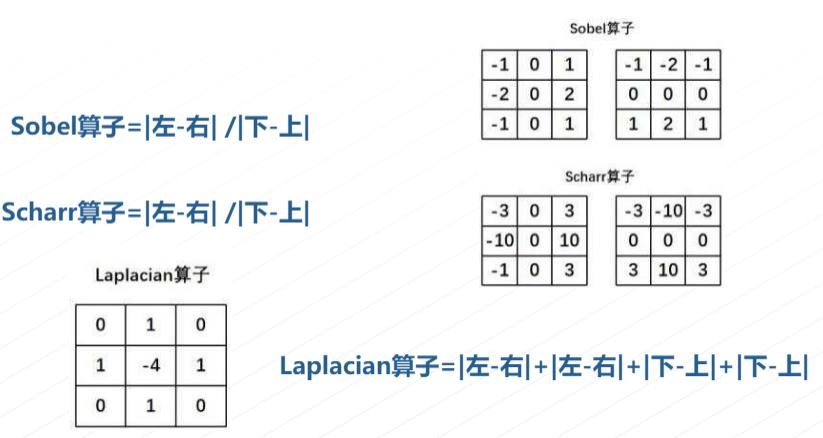
2.Sobel算子
Sobel 算子是一种离散的微分算子,该算子结合了高斯平滑和微分求导运算。该 算子利用局部差分寻找边缘,计算所得的是一个梯度的近似值。
dst=cv2.Sobeldst=cv2.Sobel((src,ddepth,dx,dy[,ksize[,scale[,delta[,borderType]]]]src,ddepth,dx,dy[,ksize[,scale[,delta[,borderType]]]]))
也可以写成
dst=cv2.Sobeldst=cv2.Sobel((src,ddepth,dx,dy)#可以省略中括号里的内容
dst: 代表目标输出图像。
src: 代表原始图像。
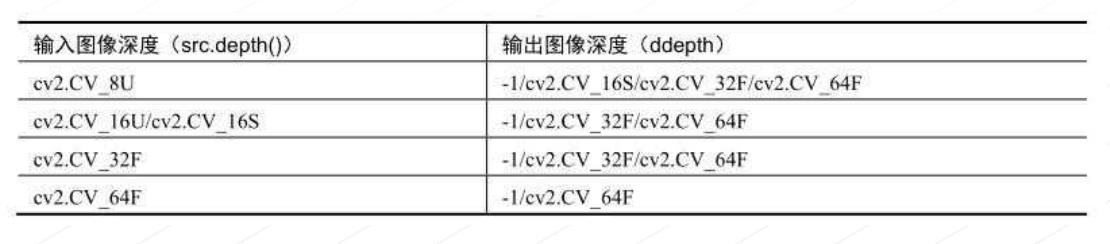
ddepth: 代表输出图像深度,具体有以下对应关系,通常用cv2.CV_64F。
dx: 代表x方向上的求导阶数。
dy: 代表y方向上的求导阶数。
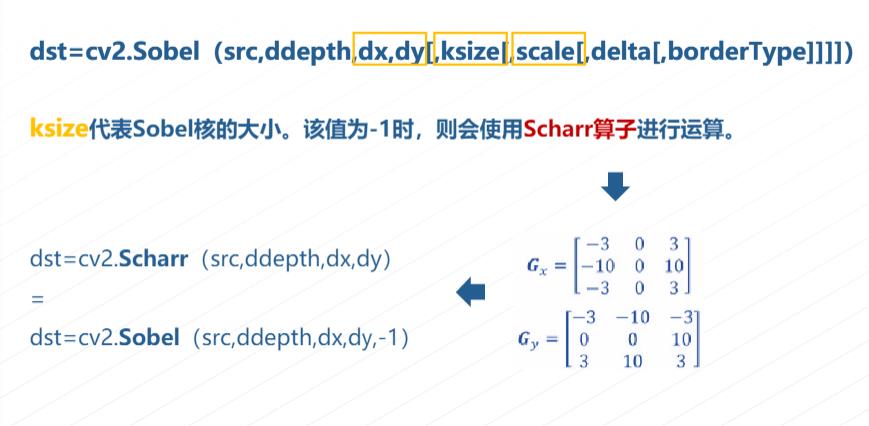
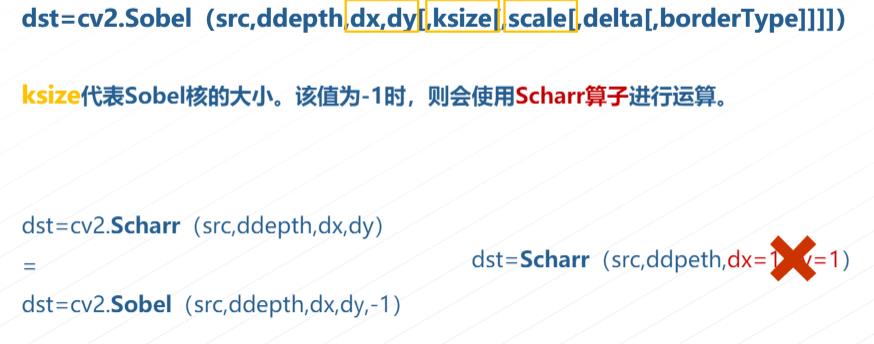
ksize: 代表Sobel核的大小。该值为-1时,则会使用Scharr算子进行运算。
scale 代表计算导数值时所采用的缩放因子,默认情况下该值是1,是没有缩放的。
delta: 代表加在目标图像dst上的值,该值是可选的,默认为0。
borderType: 代表边界样式,参数具体类型及值如下表。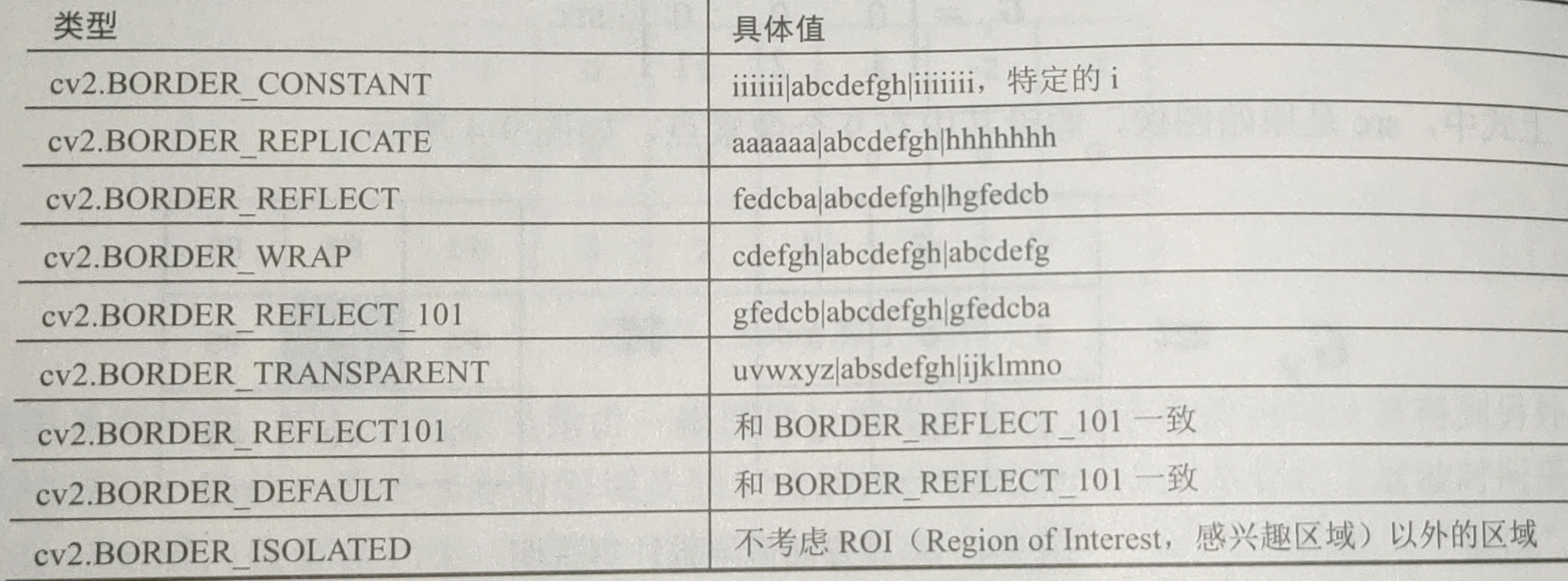
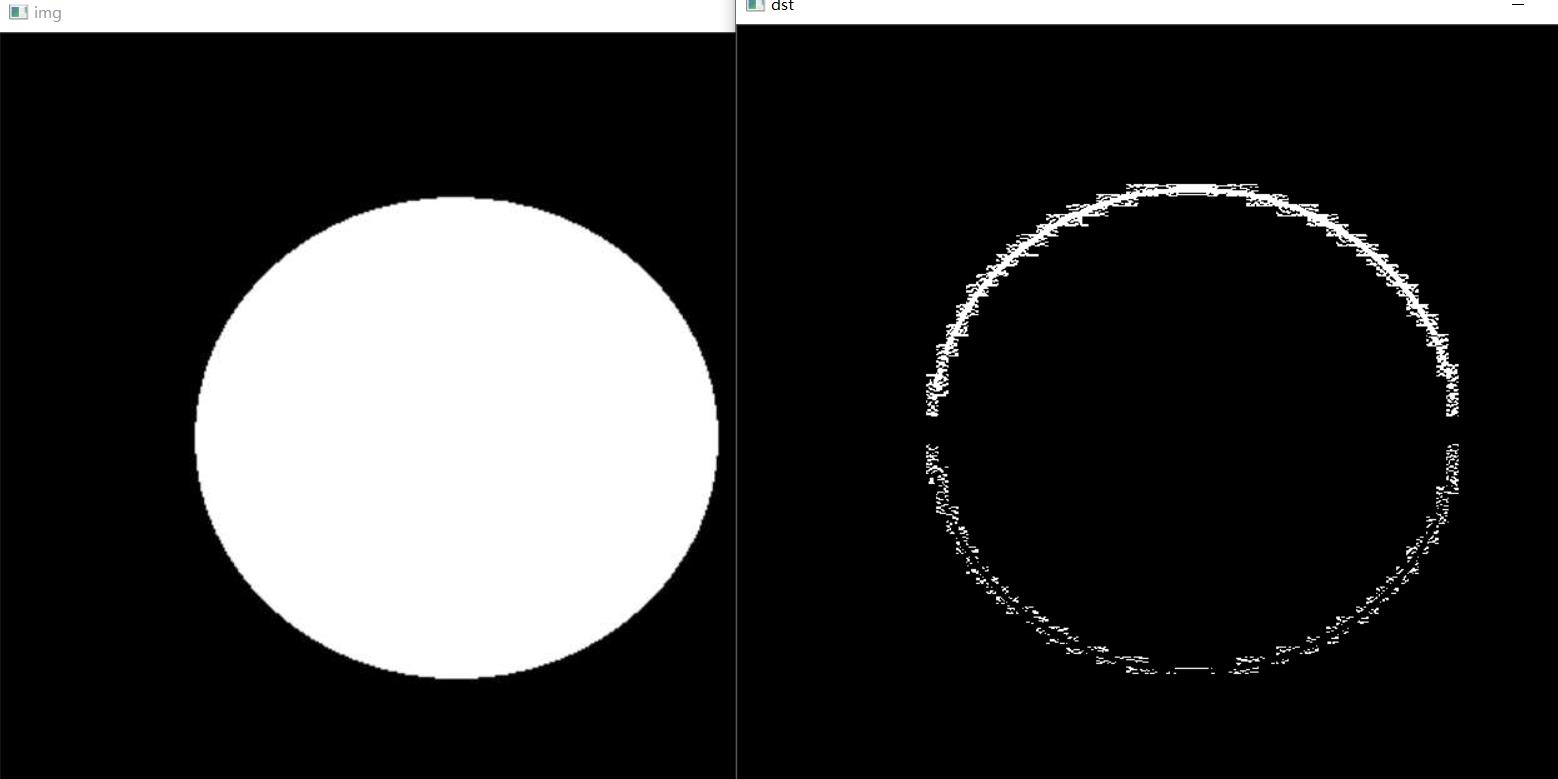
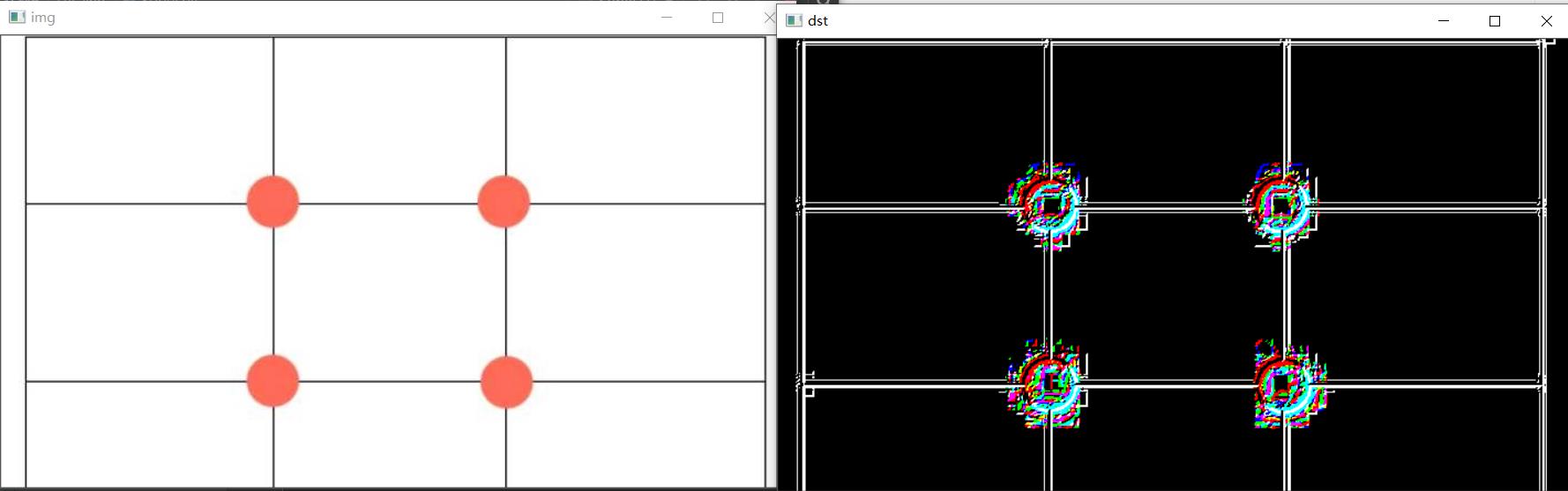
计算X方向边缘(梯度):dx=1,dy=0
import cv2
img=cv2.imread("yuan.jpg")
dst=cv2.Sobel(img,cv2.CV_64F,1,0)
cv2.imshow("img",img)
cv2.imshow("dst",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
img为原图,dst为X方向边缘计算后得出

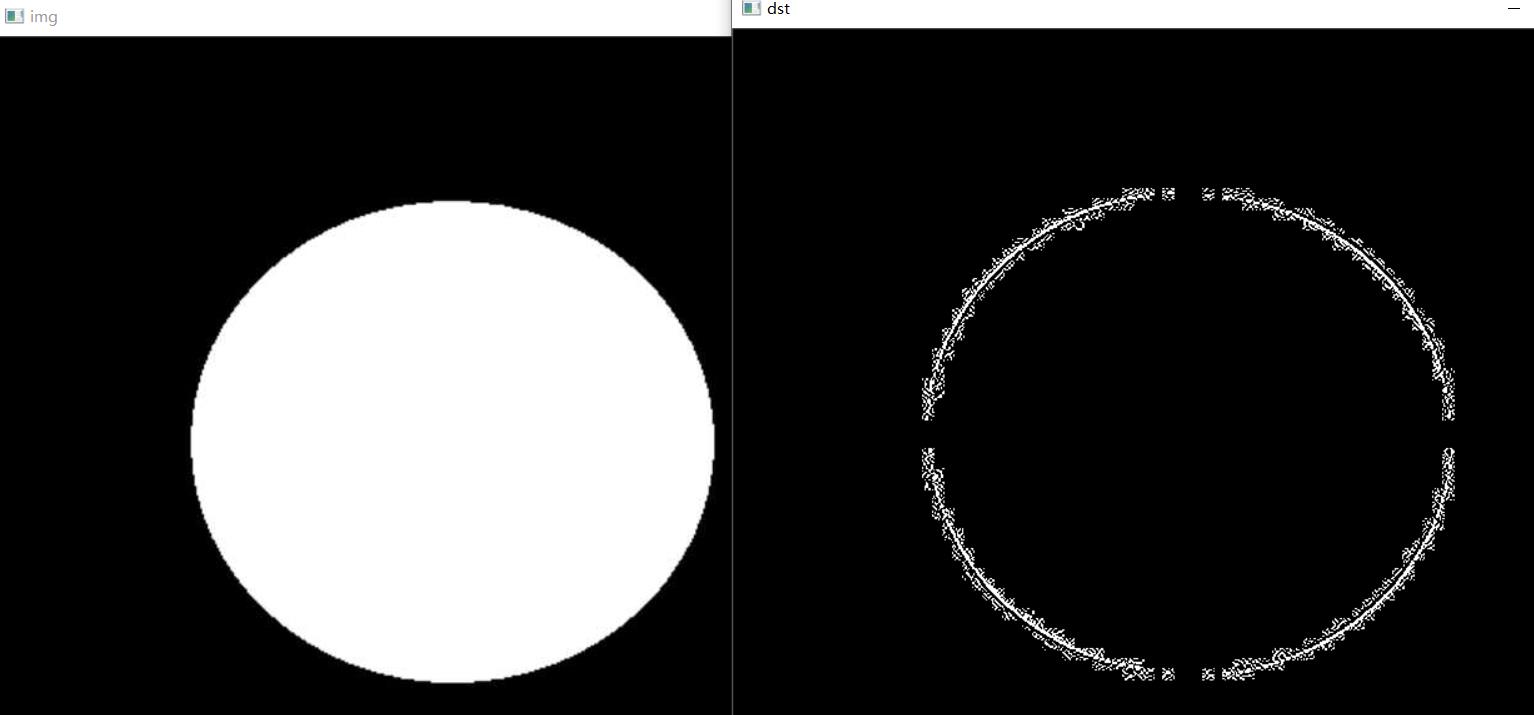
计算y方向边缘(梯度):dx=0,dy=1
import cv2
img=cv2.imread("yuan.jpg")
dst=cv2.Sobel(img,cv2.CV_64F,0,1)
cv2.imshow("img",img)
cv2.imshow("dst",dst)
cv2.waitKey(0)
cv2.destroyAllWindows
img为原图,dst为y方向边缘计算后得出
当二者参数都为1时
import cv2
img=cv2.imread("yuan.jpg")
dst=cv2.Sobel(img,cv2.CV_64F,1,1)
cv2.imshow("img",img)
cv2.imshow("dst",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
img为原图,dst为二者参数都为1时,二者不可都为0
计算x方向和y方向的边缘叠加
import cv2
img=cv2.imread("123.jpg")
dst1=cv2.Sobel(img,cv2.CV_64F,1,0)
dst2=cv2.Sobel(img,cv2.CV_64F,0,1)
dst=cv2.addWeighted(dst1,0.6,dst2,0.6,0)
cv2.imshow("img",img)
cv2.imshow("dst",dst)
cv2.waitKey(0)
cv2.destroyAllWindows()
温馨提示
3.Laplacian算子
Laplacian(拉普拉斯)算子是一种二阶导数算子,其具有旋转不变性,可以满足不同方向的图像边缘锐化(边缘检测)的要求。通常情况下,其算子的系数之和需要为零。
dst=cv2.Laplacian(src,ddepth[,ksize[,scale[,delta[,borderType]]]])#中括号里的可以不要
dst: 代表目标输出图像。
src: 代表原始图像。
ddepth: 代表目标图像深度。
ksize: 代表用于计算二阶导数的核尺寸大小。该值必须是正的奇数通过从图像内减去它的Laplacian图像,可以增强图像的对比度。
scale: 代表计算Laplacian值缩放比例因子,参数可选,默认为1,表示不进行缩放。
delta: 代表加到目标图像上的可选值。
borderType: 边界样式。
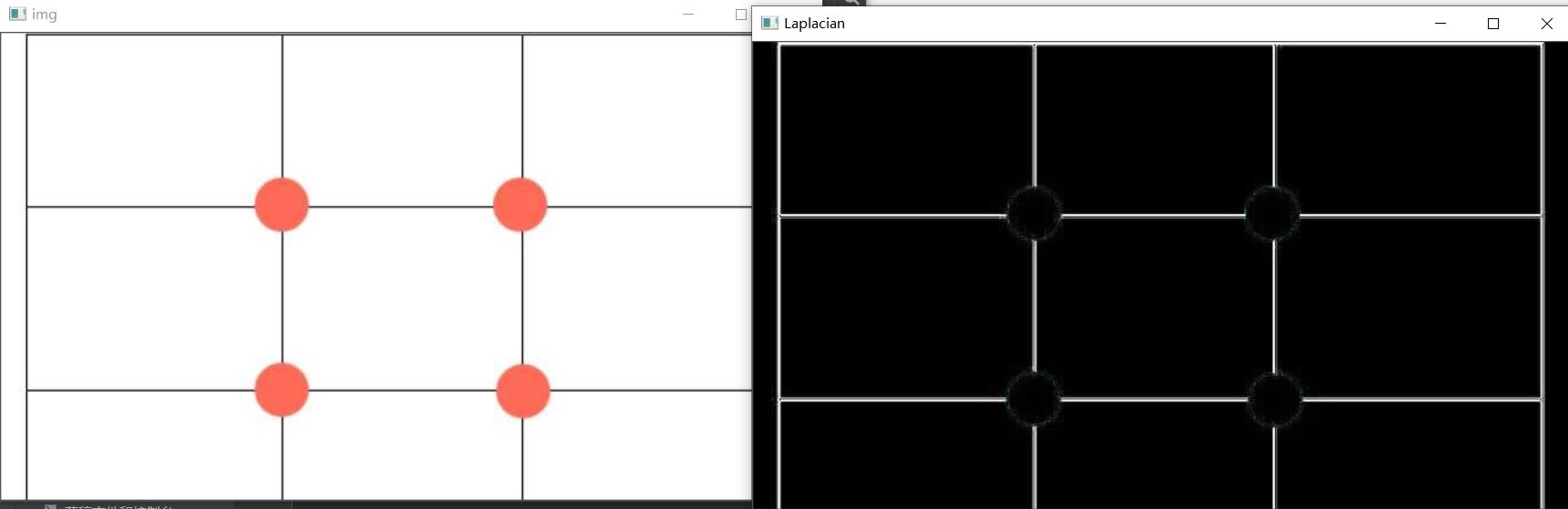
图像边缘信息
import cv2
img=cv2.imread("123.jpg")
Laplacian=cv2.Laplacian(img,cv2.CV_64F)
Laplacian=cv2.convertScaleAbs(Laplacian)
cv2.imshow("img",img)
cv2.imshow("Laplacian",Laplacian)
cv2.waitKey(0)
cv2.destroyAllWindows()
img为原图,Laplacian为拉普拉斯处理后的图。
Sobel和Laplacian算子小结
4.Canny边缘检测
1使用高斯滤波器,以平滑图像,滤除噪声。
2计算图像中每个像素点的梯度强度和方向。
3应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
4应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5通过抑制孤立的弱边缘最终完成边缘检测。
边缘检测四步曲
1.去噪: 由于图像边缘非常容易受到噪声的干扰,通常需要对图像进行滤波以去除噪声。滤波的目的是平滑一些纹理较弱的非边缘区域,以便得到更准确的边缘。滤波器的大小也是可变的,高斯核的大小对于边缘检测的效果具有很重要的作用。滤波器的核越大,边缘信息对于噪声的敏感度就越低,但边缘检测的定位错误也会随之增加。
2.计算梯度: 边缘检测算子返回水平方向的Gx和垂直方向的Gy。
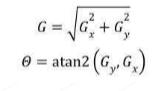
在计算梯度时,我们会得到梯度的幅度和角度(代表梯度的方向)两个值。

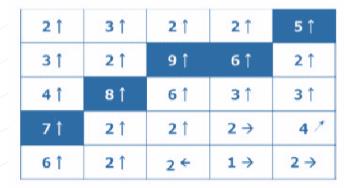
3.非极大值抑制: 在获得了梯度的幅度和方向后,遍历图像中的像素点,去除所有非边缘的点。
目的是边缘细化。如果该点是正/负梯度方向上的局部最大值,则保留该点。如果不是,则抑制该点(归零)。
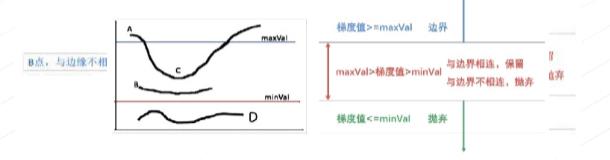
4.双阈值定边缘: 剔除存在边缘图像内的因噪声产生的虚边缘: ①高阈值 maxVal ②低阈值 minVal
与强边缘连接,则将该边缘处理为边缘。
与强边缘无连接,则该边缘为弱边缘,将其抑制。
OpenCV提供了边缘检测的函数
edges=cv2.Canny(image,threshold1,threshold2[,apertureSize[,L2gradient]])#中括号里的可以不要
**edges:**计算得到的边缘图像
image: 8位输入图像
threshold1: 表示处理过程中的第一个阈值。
threshold2: 表示处理过程中的第二个阈值。
apertureSize: 表示Sobel算子的孔径大小。
L2gradient: 为计算图像梯度幅度(gradient magnitude)的标识。其默认值为False。
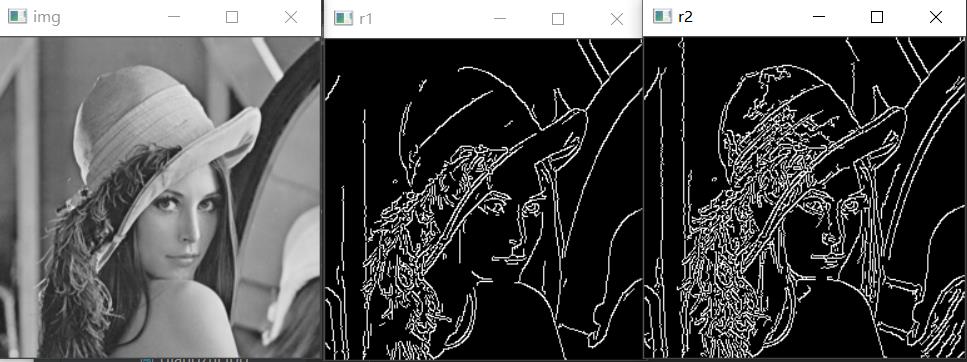
用cv2.Canny(),尝试不同大小的threshold1,threshold2看获取的边缘 有什么不同
import cv2
img=cv2.imread("lena.bmp")
r1=cv2.Canny(img,128,200)
r2=cv2.Canny(img,32,128)
cv2.imshow("img",img)
cv2.imshow("r1",r1)
cv2.imshow("r2",r2)
cv2.waitKey(0)
cv2.destroyAllWindows()
img为原图,r1参数threshold1 128,threshold2 200时的边缘检测结果;r2参数threshold1 32,threshold2 128时的边缘检测结果.
多练多学多坚持,我们下期再见。
以上是关于OpenCV图像处理应用(面向Python)之图像梯度与Canny边缘检测的主要内容,如果未能解决你的问题,请参考以下文章