ROS 信息打印(INFO DEBUG等)
Posted yaked19
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS 信息打印(INFO DEBUG等)相关的知识,希望对你有一定的参考价值。
ROS Log
ROS的Log等级跟平常的一样:Debug、Info、Warn、Error、Fatal;
#include <ros/console.h>
一、类似C语言风格 ( printf )
ROS_INFO("position=(%0.2f,%0.2f) direction=%0.2f", msg.x, msg.y, msg.theta);
二、类似C++语言风格 (类比 std::cout)
ROS_INFO_STREAM
2.1输出多个变量和设置小数点位数
ROS_INFO_STREAM( std::setprecision (2) << std::fixed<< " position=(" << msg.x << " ," << msg.y << ")" << "direction=" << msg.theta );
2.2 打印一次与定时打印
ROS_INFO_STREAM_ONCE 放在回调函数中确认数据有接收到,但是又不想一直刷屏可以用这个
ROS_INFO_STREAM_THROTTLE(0.5, "Message print every 0.5s"); 定时刷屏有时候回调的频率比较高,可以设置慢一点的打印
cout输出16进制 十六
ROS_INFO_STREAM_ONCE(recv head1 : -> << std::hex << static_cast<int>((int)buffer_data[0]));
在ros程序运行时,默认是不显示debug信息的。如果要查看debug消息,需要先运行rosrun rqt_logger_level rqt_logger_level
三、在代码中设置打印的最小等级
在ros程序运行时,默认是不显示debug信息的。如果要查看debug消息,ROS中有三种方式设置打印的最小等级
- 全局配置文件
- 利用rqt工具rosrun
rqt_logger_level rqt_logger_level - 在代码中设置打印等级
3.1 全局配置文件设置打印的最小等级
rosconsole 初始化的时候会从 $ROS_ROOT/config/rosconsole.config 加载默认配置。
echo $ROS_ROOT
/opt/ros/kinetic/share/ros
log4j.logger.ros=DEBUG
log4j.logger.ros.my_package_name=DEBUG如果写在launch文件中,则是这样(ROSCONSOLE_CONFIG_FILE 环境变量来指定配置文件)
<launch>
<env name="ROSCONSOLE_CONFIG_FILE" value="$(find mypackage)/config/custom_rosconsole.conf"/>
<node pkg="mypackage" type="mynode" name="mynode" output="screen"/>
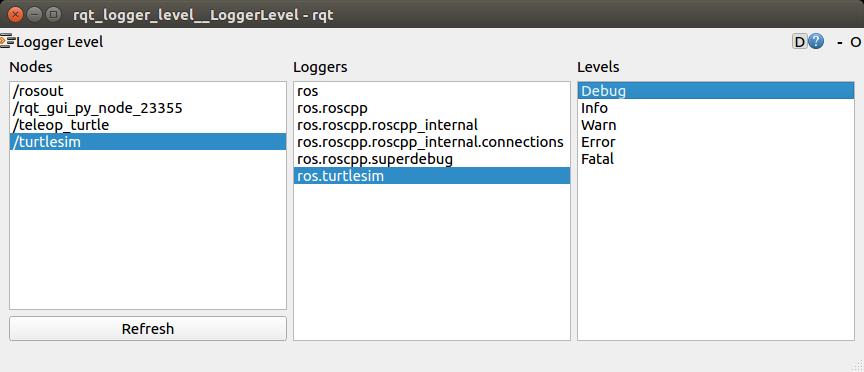
</launch>3.2 利用rqt工具
rosrun rqt_logger_level rqt_logger_level 找到node名,选择loggers,等级调整,默认为Info
rosservice call /node-name/set_logger_level ros.package-name level
这里以turtlesim为例子,roscore然后rosrun turtlesim turtlesim_node

3.3 在代码中设置打印等级
#include <ros/console.h>
if( ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Debug) )
ros::console::notifyLoggerLevelsChanged();
Compile-time Logger Removal
#define ROSCONSOLE_MIN_SEVERITY ROSCONSOLE_SEVERITY_INFO
在CMakeLists.txt中加入
add_definitions(-DROSCONSOLE_MIN_SEVERITY=ROSCONSOLE_SEVERITY_ERROR)再重新编译,Error以下的INFO和DEBUG不会打印
四、改变输出打印格式
Console Output Formatting
export ROSCONSOLE_FORMAT='[$severity] [$node] [$line]: $message'
<launch> <env name="ROSCONSOLE_FORMAT" value="[$severity] [$time] [$node]: $message"/> <node pkg="mypackage" type="mynode" name="mynode" output="screen"/> </launch>
只在ROS noetic 版本中有
export ROSCONSOLE_FORMAT='$time:%Y-%m-%d %H:%M:%S'
如果是查看真实时间,在rosrun rqt_console rqt_console中会打印实际时间
五、关闭输出到rosout
启动roscore的时候,然后rostopic list会看到一个rosout的topic。
ros::init(argc, argv, "my_node_name", ros::init_options::NoRosout);
http://wiki.ros.org/roscpp/Overview/Initialization%20and%20Shutdown#InitOptions
最常用的方式应该是3.2节改变打印的状态,打印多用用ROS_DEBUG和ROS_INFO
参考文献:
《A Gentle Introduction to ROS-examples》
http://wiki.ros.org/roscpp/Overview/Logging
http://wiki.ros.org/rosconsole
https://github.com/ros/rosconsole/blob/melodic-devel/examples/example.cpp
以上是关于ROS 信息打印(INFO DEBUG等)的主要内容,如果未能解决你的问题,请参考以下文章