Unity中的AI算法和实现1-Waypoint
Posted 拂面清风三点水
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Unity中的AI算法和实现1-Waypoint相关的知识,希望对你有一定的参考价值。
本文分享Unity中的AI算法和实现1-Waypoint
在Unity中, 我们有一些有趣且常见的AI算法可以研究和使用, 其中最常见的就是怪物的简单AI, 比如在RPG游戏里, 怪物在某些点定点巡逻, 当玩家进入检测区域时, 怪物会主动追击玩家, 追击到玩家后对玩家进行伤害, 或者在超过最大距离后脱离追击状态, 由恢复到巡逻状态.
我们接下来几篇文章会简单的实现一个基于有限状态机的怪物AI, 这篇文章是最基础的部分, 介绍Waypoint.
Waypoint顾名思义, 是用来描述点的一个抽象概念, 简单点说就是一个一个位置, 我们的怪物向这些预先设定的位置定点巡逻.
这个算法本身非常简单:
- 我们有一个Waypoint列表, 有一个怪物.
- 怪物根据顺序(可以另外定义顺序算法), 向目标点转向, 位移, 到达目标点后, 继续向下一个目标点转向和位移(也可以在这个点等待一会, 观望一番后才向下一个点前进).
- 到达最后一个目标点(数组最后一个元素), 切换到第一个目标点, 继续前进.
下面开始我们的示例.
创建场景
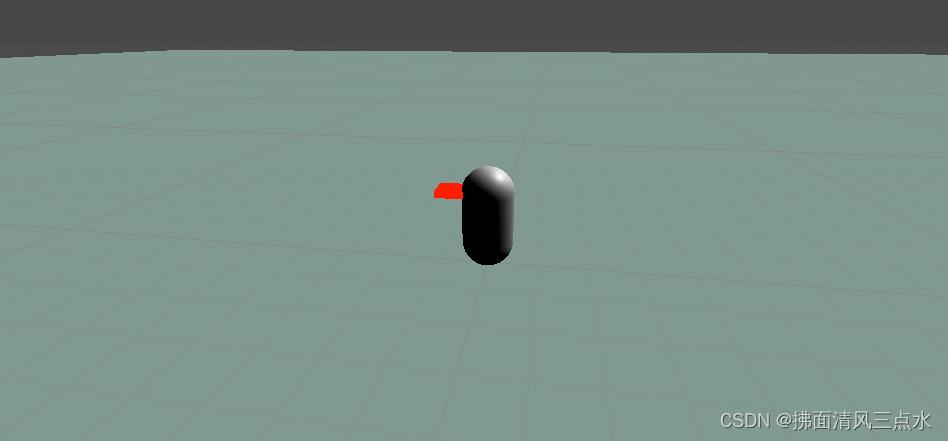
新建工程后, 往场景中拖一个Plane, 充当地面, 再拖一个Capsule充当怪物, 并给怪物创建一个眼睛, 用来表示方向, 最后调整一下整个场景的颜色(可选).
然后创建一个空的GameObject充当Waypoint容器, 然后创建空的子GameObject充当Waypoint, 我们可以给Waypoint节点增加Icon方便观察:

然后多创建几个Waypoint节点并摆好位置:

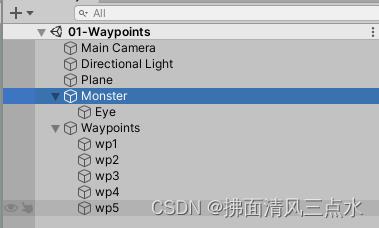
对应的Hierarchy如下:
最后创建控制脚本: MonsterContoller_Wp.cs并挂载到Monster身上.
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Debug = UnityEngine.Debug;
public class MonsterContoller_Wp : MonoBehaviour
[SerializeField] private Transform[] m_Waypoints;
[SerializeField] private float m_MoveSpeed = 10f;
[SerializeField] private float m_RotateSpeed = 10f;
[SerializeField] private float m_MinTargetDistance = 0.5f;
/// <summary>
/// 当前wp索引
/// </summary>
private int m_CurrentWpIndex = 0;
/// <summary>
/// 缓存Transform, 避免每帧使用属性获取
/// </summary>
private Transform m_SelfTrans;
private void Start()
m_SelfTrans = transform;
Application.targetFrameRate = 60;
private void Update()
var target = m_Waypoints[m_CurrentWpIndex];
if (Vector3.Distance(target.position, m_SelfTrans.position) < m_MinTargetDistance)
// 已经靠近, 切换到下一个点
m_CurrentWpIndex++;
m_CurrentWpIndex %= m_Waypoints.Length; // 越界后从头开始
target = m_Waypoints[m_CurrentWpIndex];
var targetDir = (target.position - m_SelfTrans.position).normalized;
// 移动和转向
m_SelfTrans.Translate(targetDir * Time.deltaTime * m_MoveSpeed, Space.World); // 匀速向forward移动Time.deltaTime * m_MoveSpeed长度的距离
m_SelfTrans.rotation = Quaternion.Lerp(m_SelfTrans.rotation, Quaternion.LookRotation(targetDir), Time.deltaTime * m_RotateSpeed);
代码很简单, 也有对应的注释, 这里不再赘述, 下面是效果:

好了, 今天的内容就是这些, 希望对大家有所帮助.
A*算法在Unity中的实现
文章目录
一、A*算法是什么
A星算法是一种搜索策略,是一种启发式图搜索策略。不同于深度优先搜索或广度优先搜索等盲目搜索策略,它能够利用与问题有关的启发信息进行搜索。和迪杰斯特拉算法类似,它们之所以是启发式的,是因为融入了人们既嗤之以鼻又甘之如饴的思想:“贪心”。
为什么说是“贪心”的呢?是因为每次扩展节点的时候都尽可能的选择路径最短的节点,而Dijkstra算法更看重的是已扩展的节点到起点的路径最短,而A星算法兼顾已扩展节点到起点的路径最短和到终点的路径最短,所以说A星算法应该可以说更高级一点。
如何记录已扩展节点到起点的路径和已扩展节点到终点的路径呢?A星算法的每个节点通过G(n)和H(n)分别记录到起点的花销和到终点的最佳路径的估计代价,两者的和F(n)便是这个节点的估价函数——估价函数也就是该节点到终点的最小代价的估计值,是我们评判某一个节点优越与否的唯一参考标准。
A星算法一定就是最好的吗?我们定义H*(n)是某个节点到终点的最优路径的代价,即真实的代价,而非估计值,且有H(n)≤H*(n)恒成立。我觉得某人写的A星算法的程序好与不好,主要看H(n)跟H*(n)是否足够接近,如果H(n)=H*(n)的话,我们就不会扩展任何无关的节点,那么这个算法就绝对是最好的。但我们接下来的算法使用节点到终点的对角距离当作H(n)的,所以是会扩展一些不必要的节点的。但瘦死的骆驼比马大,肯定比宽度优先搜索和深度优先搜索还是要快的。
二、为什么要在Unity中用A*
如果只是用Vector2.MoveTowards,或者只是用transform.position+=方向向量×速度×Time.deltaTime的话,那么这种怪的AI就有点太蠢了,一不会绕开障碍,二只会往主角脸上突。如果一种两种怪的AI是这样那么还可以,如果所有怪的AI都是这种单调乏味的移动方式,那么玩家就会感到疲劳。
这两只怪只能隔着障碍喷我
想象一下,如果有怪物绕开了障碍物跑到你旁边给你来个背刺,是不是游戏难度一下就加大了?各位高级玩家是不是立马就兴奋起来了♂?
当然,A星算法在游戏中的应用远远不止这些,欢迎大家来补充。
三、代码实现
废话说了很多,还是直接上代码吧。我这个程序呢是参考了一个YouTube博主的视频的,大家如果感兴趣的话可以去看那个博主的视频学习。贴一下网址:
https://www.youtube.com/watch?v=alU04hvz6L4
1.创建节点类
public class Node
private Grid<Node> grid;
public int gridX;
public int gridY;
public int gCost;
public int hCost;
public bool isBarrier;
public Node cameFromNode;
public int FCost get return gCost + hCost;
public Node(Grid<Node> _grid,int x,int y)
this.grid = _grid;
this.gridX = x;
this.gridY = y;
isBarrier = false;
public void SetIsBarrier(bool _isBarrier)
this.isBarrier = _isBarrier;
grid.TriggerGridObjectChanged(gridX, gridY);
解释一下:每个节点有我们之前说的估价函数h(n)节点与起点的实际代价g(n),F(n)直接设一个getter返回它俩的和就好了。
gridX和gridY是该节点在网格中的位置,我们节点的位置并不是用的World Position,而是一个非负的整型,就像下图这样,左下角的坐标是[0,0],往右x加一,往上y加一,以此类推。
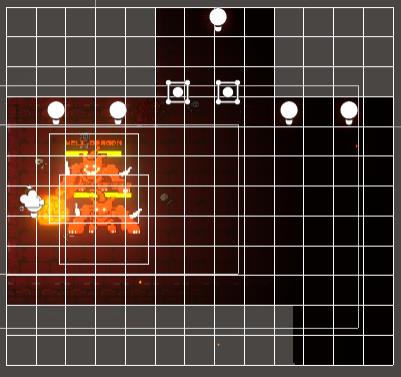
cameFrom节点很重要,也就是它的父节点,通过这个节点一直向上回溯才能找到我们最终要走的路。
isBarrier这个布尔值用来记录该节点是不是有障碍物,有障碍物的话直接放到closed表里就不管它了。不是的话再考虑放到open表里扩展。
2.创建网格类
public class Grid<T>
public event EventHandler<OnGridValueChangedEventArgs> OnGridValueChanged;
public class OnGridValueChangedEventArgs:EventArgs
public int x;
public int y;
private int width;
private int height;
private T[,] gridArray;//创建一个二维数组用来存储网格的每一个节点,大小为网格长度乘以网格宽度
private float cellSize;
private Vector3 originPosition;
public Grid(int _width, int _height,float _cellSize,Vector3 _originPosition,Func<Grid<T>,int,int,T> _createGridObject)
this.width = _width;
this.height = _height;
this.cellSize = _cellSize;
this.originPosition = _originPosition;
gridArray = new T[this.width, this.height];
for (int x = 0; x < width; x++)
for (int y = 0; y < height; y++)
gridArray[x, y] = _createGridObject(this,x,y);
Debug.DrawLine(GetWorldPosition(x, y), GetWorldPosition(x, y + 1));
Debug.DrawLine(GetWorldPosition(x, y), GetWorldPosition(x + 1, y));
Debug.DrawLine(GetWorldPosition(width, 0), GetWorldPosition(width, height));
Debug.DrawLine(GetWorldPosition(0, height), GetWorldPosition(width, height));
public int GetWidth()
return this.width;
public int GetHeight()
return this.height;
public float GetCellSize()
return this.cellSize;
public T[,] GetGridArray()
return this.gridArray;
public Vector3 GetOriginPosition()
return this.originPosition;
private Vector3 GetWorldPosition(int x,int y)
return new Vector3(x, y) * cellSize+originPosition;
public Vector2 GetXY(Vector3 _worldPosition)
return new Vector2(_worldPosition.x - originPosition.x / cellSize,
_worldPosition.y - originPosition.y /cellSize);
public void SetValue(int x, int y, T value)
if(x>=0 && y>=0 && x<width && y<height)
gridArray[x, y] = value;
OnGridValueChanged?.Invoke(this, new OnGridValueChangedEventArgs x = x, y = y );
public void TriggerGridObjectChanged(int x,int y)
OnGridValueChanged?.Invoke(this, new OnGridValueChangedEventArgs x = x, y = y );
public void SetValue(Vector3 _worldPosition, T value)
int x, y;
x = Mathf.FloorToInt(GetXY(_worldPosition).x);
y = Mathf.FloorToInt(GetXY(_worldPosition).y);
SetValue(x, y, value);
public T GetValue(int x,int y)
if (x >= 0 && y >= 0 && x < width && y < height)
return gridArray[x, y];
else
return default;
public T GetValue(Vector3 _worldPosition)
int x, y;
x= Mathf.FloorToInt(GetXY(_worldPosition).x);
y = Mathf.FloorToInt(GetXY(_worldPosition).y);
return GetValue(x, y);
主要就是网格的初始化,World Position和网格坐标的转来转去,以及一些getter和setter。
3.PathFinding核心代码
public class PathFinding
private const int MOVE_STRAIGHT_COST=10;
private const int MOVE_DIAGONAL_COST = 14;//本A*算法使用对角距离
private List<Node> openList;
private List<Node> closedList;
public static PathFinding Instance get; private set;
public Grid<Node> Grid get; set;
public Node GetNode(int x, int y)
return Grid.GetValue(x, y);
public PathFinding(string sceneName)
Instance = this;
Vector3 barrierGridPosition = Vector3.zero;
switch (sceneName)
case "Hell_Mid":
Grid = new Grid<Node>(13, 12, 1, new Vector3(-3, -8, 0), (Grid<Node> g, int x, int y) => new Node(g, x, y));
break;
public List<Vector3> FindPath(Vector3 _startWorldPosition,Vector3 _endWorldPosition)
Vector2 startPosition=Grid.GetXY(_startWorldPosition);
Vector2 endPosition=Grid.GetXY(_endWorldPosition);
List<Node> path = FindPath(Mathf.FloorToInt(startPosition.x), Mathf.FloorToInt(startPosition.y),
Mathf.FloorToInt(endPosition.x), Mathf.FloorToInt(endPosition.y));
if(path==null)
return null;
else
List<Vector3> worldPath=new List<Vector3> ;
foreach(Node node in path)
worldPath.Add(Grid.GetOriginPosition()+new Vector3(node.gridX, node.gridY) * Grid.GetCellSize() + new Vector3(1, 1, 0) * Grid.GetCellSize() * .5f);
return worldPath;
public List<Node> FindPath(int _startX,int _startY,int _endX,int _endY)
Node startNode = Grid.GetValue(_startX, _startY);//定义起始节点,起始节点将作为Open表中的第一个元素
Node endNode = Grid.GetValue(_endX, _endY);
openList = new List<Node> startNode;
closedList = new List<Node>();
#region
//初始化所有节点,让每个节点的gCost设为无穷大,前一节点设为空值
for(int x=0;x<Grid.GetWidth();x++)
for(int y=0;y<Grid.GetHeight();y++)
Node node = Grid.GetValue(x,y);
node.gCost = int.MaxValue;
node.cameFromNode = null;
#endregion
startNode.gCost = 0;
startNode.hCost = CaculateDistanceCost(startNode, endNode);
while(openList.Count>0)
SortList();
Node currentNode = openList[0];
if (currentNode==endNode)
openList.Remove(currentNode);
closedList.Add(currentNode);
return CaculatePath(currentNode);
else
openList.Remove(currentNode);
closedList.Add(currentNode);
foreach (Node neighbourNode in GetNeighbourList(currentNode))
if (closedList.Contains(neighbourNode)) continue;
if(neighbourNode.isBarrier)
closedList.Add(neighbourNode);
continue;
int tentativeGCost = currentNode.gCost + CaculateDistanceCost(currentNode, neighbourNode);
if(tentativeGCost<neighbourNode.gCost)
neighbourNode.cameFromNode = currentNode;
neighbourNode.gCost = tentativeGCost;
neighbourNode.hCost = CaculateDistanceCost(neighbourNode, endNode);
if(!openList.Contains(neighbourNode))
openList.Add(neighbourNode);
return null;
private List<Node> GetNeighbourList(Node _currentNode)
List<Node> neighbourList = new List<Node> ;
if((_currentNode.gridX-1)>=0)
neighbourList.Add(GetNode(_currentNode.gridX - 1, _currentNode.gridY));//左邻居
if((_currentNode.gridY-1)>=0)
neighbourList.Add(GetNode(_currentNode.gridX - 1, _currentNode.gridY - 1));//左下邻居
if((_currentNode.gridY+1)<Grid.GetHeight())
neighbourList.Add(GetNode(_currentNode.gridX - 1, _currentNode.gridY + 1));//左上邻居
if((_currentNode.gridX+1)<Grid.GetWidth())
neighbourList.Add(GetNode(_currentNode.gridX + 1, _currentNode.gridY));//右邻居
if((_currentNode.gridY-1)>=0)
neighbourList.Add(GetNode(_currentNode.gridX + 1, _currentNode.gridY - 1));//右下邻居
if((_currentNode.gridY+1)<Grid.GetHeight())
neighbourList.Add(GetNode(_currentNode.gridX + 1, _currentNode.gridY + 1));//右上邻居
if((_currentNode.gridY-1)>=0)
neighbourList.以上是关于Unity中的AI算法和实现1-Waypoint的主要内容,如果未能解决你的问题,请参考以下文章