基于mediapipe的动作捕捉和Unity的球棍模型同步
Posted maxindemaxinde
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于mediapipe的动作捕捉和Unity的球棍模型同步相关的知识,希望对你有一定的参考价值。
基于mediapipe的动作捕捉和Unity的球棍模型同步
所需环境
这是我所使用的环境
python3.9 安装mediapipe和opencv-python包
python和Unity通信使用socket
Unity2021.3
python端
如何安装那两个包我就不说了,大家有不明白可以去百度
mediapipe和opencv-python
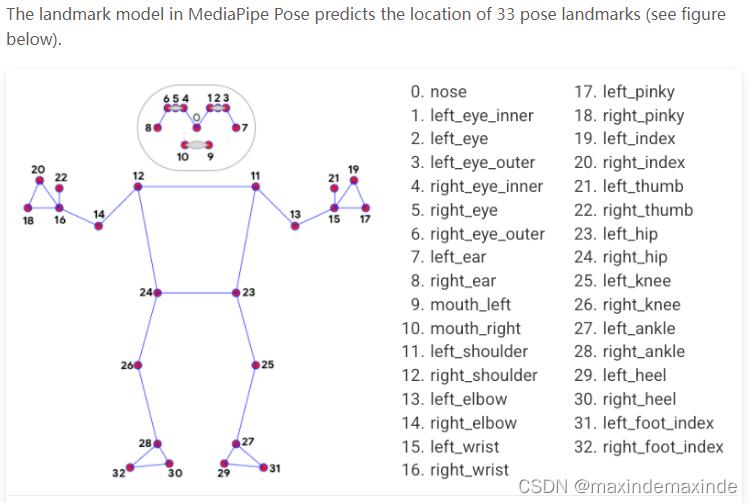
1.把我们要使用的mediapipe的功能封装成一个module
这个module返回一个列表,列表中存放mediapipe识别到的特征点
import cv2
import mediapipe as mp
import time
class poseDetector():
def __init__(self, mode=False, upBody=False, smooth=True, detectionCon=0.5, trackCon=0.5):
self.mode = mode
self.upBody = upBody
self.smooth = smooth
self.detectionCon = detectionCon
self.trackCon = trackCon
self.mpDraw = mp.solutions.drawing_utils
self.mpPose = mp.solutions.pose
self.pose = self.mpPose.Pose(self.mode, self.upBody, self.smooth, False, True, # 这里的False 和True为默认
self.detectionCon, self.trackCon) # pose对象 1、是否检测静态图片,2、姿态模型的复杂度,3、结果看起来平滑(用于video有效),4、是否分割,5、减少抖动,6、检测阈值,7、跟踪阈值
'''
STATIC_IMAGE_MODE:如果设置为 false,该解决方案会将输入图像视为视频流。它将尝试在第一张图像中检测最突出的人,并在成功检测后进一步定位姿势地标。在随后的图像中,它只是简单地跟踪那些地标,而不会调用另一个检测,直到它失去跟踪,以减少计算和延迟。如果设置为 true,则人员检测会运行每个输入图像,非常适合处理一批静态的、可能不相关的图像。默认为false。
MODEL_COMPLEXITY:姿势地标模型的复杂度:0、1 或 2。地标准确度和推理延迟通常随着模型复杂度的增加而增加。默认为 1。
SMOOTH_LANDMARKS:如果设置为true,解决方案过滤不同的输入图像上的姿势地标以减少抖动,但如果static_image_mode也设置为true则忽略。默认为true。
UPPER_BODY_ONLY:是要追踪33个地标的全部姿势地标还是只有25个上半身的姿势地标。
ENABLE_SEGMENTATION:如果设置为 true,除了姿势地标之外,该解决方案还会生成分割掩码。默认为false。
SMOOTH_SEGMENTATION:如果设置为true,解决方案过滤不同的输入图像上的分割掩码以减少抖动,但如果 enable_segmentation设置为false或者static_image_mode设置为true则忽略。默认为true。
MIN_DETECTION_CONFIDENCE:来自人员检测模型的最小置信值 ([0.0, 1.0]),用于将检测视为成功。默认为 0.5。
MIN_TRACKING_CONFIDENCE:来自地标跟踪模型的最小置信值 ([0.0, 1.0]),用于将被视为成功跟踪的姿势地标,否则将在下一个输入图像上自动调用人物检测。将其设置为更高的值可以提高解决方案的稳健性,但代价是更高的延迟。如果 static_image_mode 为 true,则忽略,人员检测在每个图像上运行。默认为 0.5。
'''
def findPose(self, img, draw=True):
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 将BGR格式转换成灰度图片
self.results = self.pose.process(imgRGB) # 处理 RGB 图像并返回检测到的最突出人物的姿势特征点。
if self.results.pose_landmarks:
if draw:
self.mpDraw.draw_landmarks(img, self.results.pose_landmarks, self.mpPose.POSE_CONNECTIONS)
# results.pose_landmarks画点 mpPose.POSE_CONNECTIONS连线
return img
def findPosition(self, img, draw = True):
#print(results.pose_landmarks)
lmList = []
if self.results.pose_landmarks:
for id, lm in enumerate(self.results.pose_landmarks.landmark): # enumerate()函数用于将一个可遍历的数据对象(如列表、元组或字符串)组合为一个索引序列,同时列出数据和数据下标
h, w, c = img.shape # 返回图片的(高,宽,位深)
cx, cy, cz = int(lm.x * w), int(lm.y * h), int(lm.z * w) # lm.x lm.y是比例 乘上总长度就是像素点位置
lmList.append([id, cx, cy, cz])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 0), cv2.FILLED) # 画蓝色圆圈
return lmList
def main():
# cap = cv2.VideoCapture(0) # 调用电脑摄像头
# cap = cv2.VideoCapture('video/2.mp4') # 视频
# cap = cv2.VideoCapture('video/3.png')
cap = cv2.VideoCapture('video/ASOUL.mp4')
pTime = 0
detector = poseDetector()
while True:
success, img = cap.read() # 第一个参数代表有没有读取到图片True/False 第二个参数frame表示截取到一帧的图片 读进来直接是BGR 格式数据格式
img = detector.findPose(img)
lmList = detector.findPosition(img)
if len(lmList) != 0:
print(lmList) # print(lmList[n]) 可以打印第n个
# 计算帧率
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (70, 50), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 0), 3) # 图片上添加文字 参数:图片 要添加的文字 文字添加到图片上的位置 字体的类型 字体大小 字体颜色 字体粗细
cv2.imshow("Image", img) # 显示图片
cv2.waitKey(3) # 等待按键
if __name__ == "__main__":
main()
2.把一帧图像的33个特征点的信息变成一个字符串,以 “,”隔开
通过socket构建一个客户端client,把包含特征点信息的字符串发送到unity的服务端
import cv2
import time
import PoseModule as pm
import socket
pTime = 0
def computeFPS():
global pTime
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (70, 50), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 0), 3) # 图片上添加文字 参数:图片 要添加的文字 文字添加到图片上的位置 字体的类型 字体大小 字体颜色 字体粗细
# cap = cv2.VideoCapture(0) # 调用电脑摄像头
cap = cv2.VideoCapture('video/2.mp4') # 视频
# 构建一个实例,去连接服务端的监听端口。
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
client.connect(('127.0.0.1', 1234))
# msg=client.recv(1024)
# print('New message from server: %s' % msg.decode('utf-8'))
detector = pm.poseDetector()
strdata = "" # 定义字符串变量
while True:
success, img = cap.read() # 第一个参数代表有没有读取到图片True/False 第二个参数frame表示截取到一帧的图片 读进来直接是BGR 格式数据格式
img = detector.findPose(img)
lmList = detector.findPosition(img)
# if len(lmList) != 0:
# print(lmList)
if len(lmList) != 0:
for data in lmList:
print(data) # print(lmList[n]) 可以打印第n个
for i in range(1, 4):
if i == 2:
strdata = strdata + str(img.shape[0] - data[i]) + ','
else:
strdata = strdata + str(data[i]) + ','
print(strdata)
client.send(strdata.encode('utf-8'))
strdata = ""
computeFPS() # 计算帧率
cv2.imshow("Image", img) # 显示图片
cv2.waitKey(10) # 等待按键
unity端
1.在场景中构建出人的球棍模型,不需要在意他们的位置,通过代码给他们赋值,场景中的层级结构如图
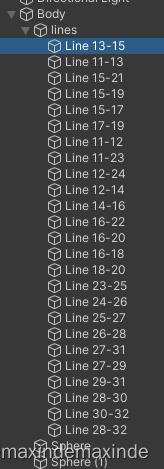
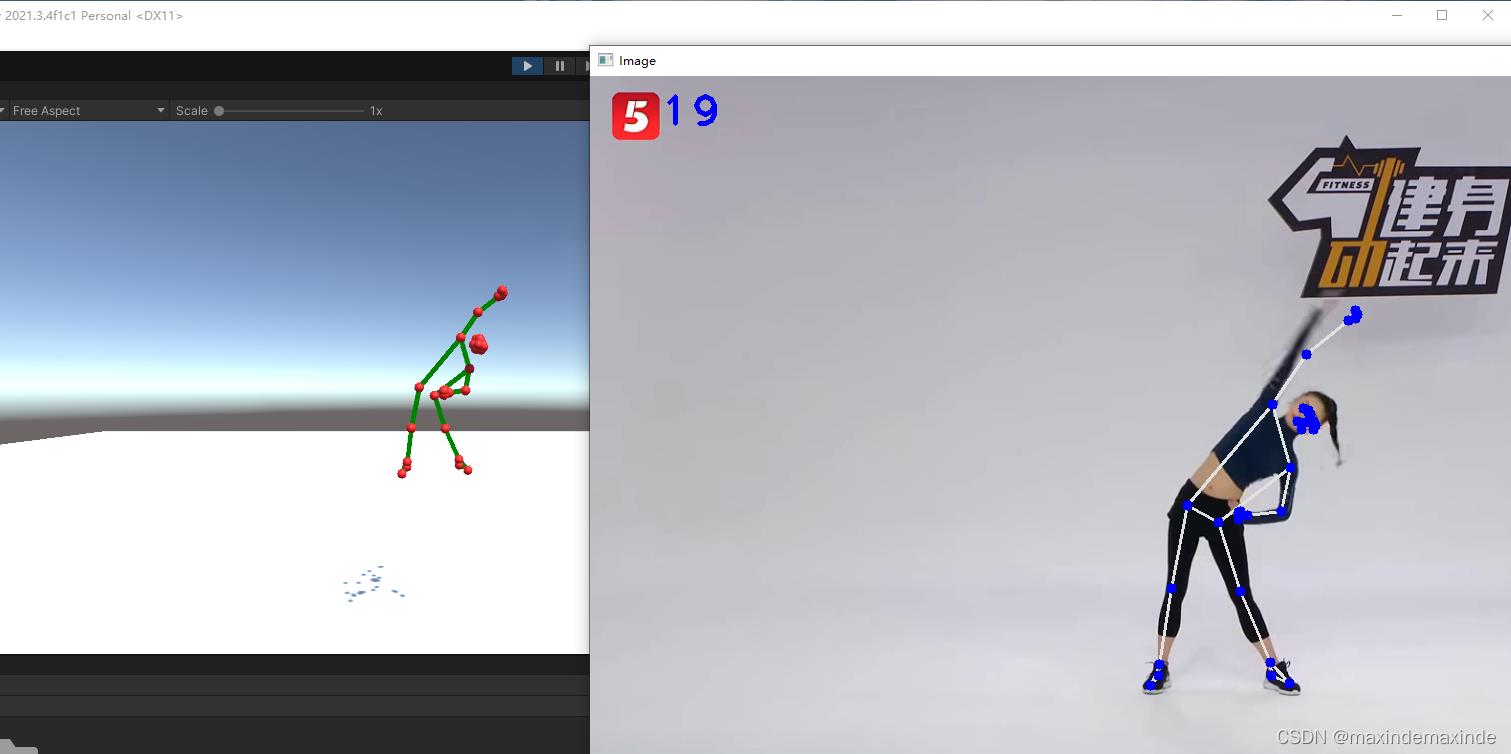
场景中33个红色的球表示特征点,绿色的线表示骨架
具体需要多少骨架可以自己决定,我没有弄头上的
2.通过socket创建一个服务端(server),接收python客户端传来的特征点坐标数据,赋值给unity场景中的特征点
using System;
using System.Collections;
using System.Collections.Generic;
using System.Net;
using System.Net.Sockets;
using System.Text;
using System.Threading;
using UnityEngine;
public class Server : MonoBehaviour
//public GameObject leftshoulder;
public GameObject[] Body;
private static int myProt = 9999; //端口
static Socket serverSocket;
Thread myThread;
string str;
Dictionary<string, Thread> threadDic = new Dictionary<string, Thread>();//存储线程,程序结束后关闭线程
private void Start()
//服务器IP地址 ,127.0.0.1 为本机IP地址
IPAddress ip = IPAddress.Parse("127.0.0.1");
//IPAddress ip = IPAddress.Any; //本机地址
Debug.Log(ip.ToString());
serverSocket = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp);
IPEndPoint iPEndPoint = new IPEndPoint(ip, myProt);
//serverSocket.Bind(new IPEndPoint(ip, myProt)); //绑定IP地址:端口
serverSocket.Bind(iPEndPoint); //绑定IP地址:端口
serverSocket.Listen(10); //最多10个连接请求
//Console.WriteLine("creat service 0 success",
// serverSocket.LocalEndPoint.ToString());
myThread = new Thread(ListenClientConnect);
myThread.Start();
//Console.ReadLine();
Debug.Log("服务器启动...........");
public void Update()
if (str != null)
Debug.Log(str);//接受的数据
string[] points = str.Split(',');
Debug.Log(points.Length);
for (int i = 0; i <= 32; i++)
float x = float.Parse(points[0 + (i * 3)]) / 100;
float y = float.Parse(points[1 + (i * 3)]) / 100;
float z = float.Parse(points[2 + (i * 3)]) / 300;
Body[i].transform.localPosition = new Vector3(x, y, z);
// 监听客户端是否连接
private void ListenClientConnect()
while (true)
Socket clientSocket = serverSocket.Accept(); //1.创建一个Socket 接收客户端发来的请求信息 没有消息时堵塞
clientSocket.Send(Encoding.ASCII.GetBytes("Server Say Hello")); //2.向客户端发送 连接成功 消息
Thread receiveThread = new Thread(ReceiveMessage); //3.为已经连接的客户端创建一个线程 此线程用来处理客户端发送的消息
receiveThread.Start(clientSocket); //4.开启线程
//添加到字典中
string clientIp = ((IPEndPoint)clientSocket.RemoteEndPoint).Address.ToString();
//Debug.Log( clientSocket.LocalEndPoint.ToString()); //获取ip:端口号
if (!threadDic.ContainsKey(clientIp))
threadDic.Add(clientIp, receiveThread);
private byte[] result = new byte[1024]; //1.存入的byte值 最大数量1024
//开启线程接收数据 (将Socket作为值传入)
private void ReceiveMessage(object clientSocket)
Socket myClientSocket = (Socket)clientSocket; //2.转换传入的客户端Socket
while (true)
try
//接收数据
int receiveNumber = myClientSocket.Receive(result); //3.将客户端得到的byte值写入
//Debug.Log(receiveNumber);//子节数量
if (receiveNumber > 0)
str = Encoding.UTF8.GetString(result, 0, receiveNumber);//将接受的数据存到str变量中
// Debug.Log(str);
else
Debug.Log("client: " + ((IPEndPoint)myClientSocket.RemoteEndPoint).Address.ToString() + "断开连接");
threadDic[((IPEndPoint)myClientSocket.RemoteEndPoint).Address.ToString()].Abort(); //清除线程
catch (Exception ex)
//myClientSocket.Shutdown(SocketShutdown.Both); //出现错误 关闭Socket
Debug.Log(" 错误信息" + ex); //打印错误信息
break;
void OnApplicationQuit()
//结束线程必须关闭 否则下次开启会出现错误 (如果出现的话 只能重启unity了)
myThread.Abort();
//关闭开启的线程
foreach (string item in threadDic.Keys)
Debug.Log(item);//de.Key对应于key/value键值对key
//item.Value.GetType()
threadDic[item].Abort();
3.让骨架连接对应的特征点
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class linecode : MonoBehaviour
LineRenderer lineRenderer;
public Transform oringin;
public Transform destination;
// Start is called before the first frame update
void Start()
lineRenderer = GetComponent<LineRenderer>();
lineRenderer.startWidth = 0.1f;
lineRenderer.endWidth = 0.1f;
// Update is called once per frame
void Update()
lineRenderer.SetPosition(0, oringin.position);
lineRenderer.SetPosition(1, destination.position);
具体场景中的脚本挂载情况可以下载工程查看
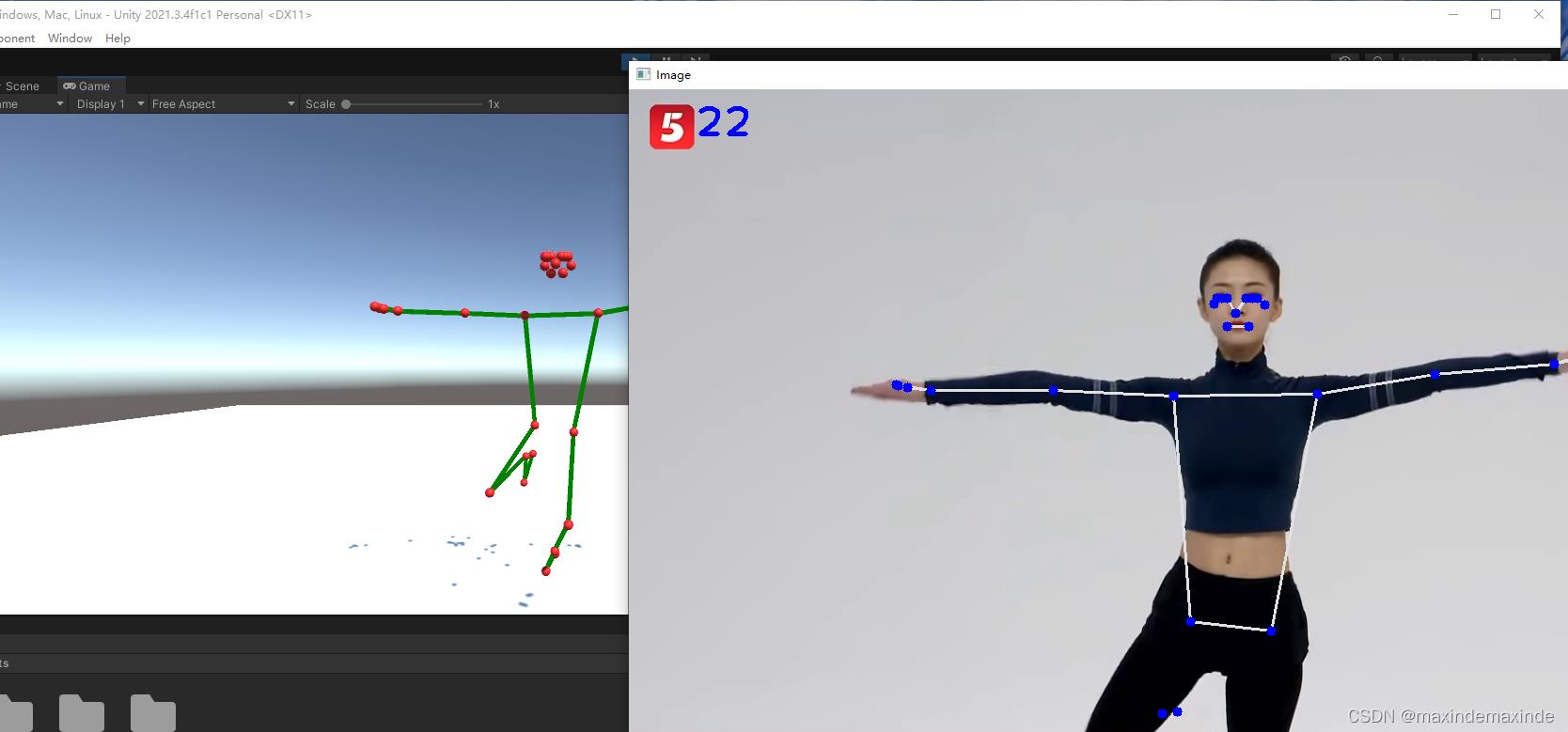
效果
资源下载:
链接:https://pan.baidu.com/s/1XBBWV1wCxyW0FyRTOtorkw?pwd=sbyq
提取码:sbyq
参考:https://www.youtube.com/watch?v=BtMs0ysTdkM
OpenCV+Mediapipe手势动作捕捉与Unity引擎的结合
OpenCV+Mediapipe手势动作捕捉与Unity引擎的结合
前言
本篇文章将介绍如何使用Python利用OpenCV图像捕捉,配合强大的Mediapipe库来实现手势动作检测与识别;将识别结果实时同步至Unity中,实现手势模型在Unity中运动身体结构识别
Demo演示
Demo展示:https://hackathon2022.juejin.cn/#/works/detail?unique=WJoYomLPg0JOYs8GazDVrw
本篇文章所用的技术会整理后开源,后续可以持续关注:
GitHub:https://github.com/BIGBOSS-dedsec
项目下载地址:https://github.com/BIGBOSS-dedsec/OpenCV-Unity-To-Build-3DHands
CSDN: https://blog.csdn.net/weixin_50679163?type=edu
同时本篇文章实现的技术参加了稀土掘金2022编程挑战赛-游戏赛道-优秀奖
作品展示:https://hackathon2022.juejin.cn/#/works/detail?unique=WJoYomLPg0JOYs8GazDVrw

认识Mediapipe
项目的实现,核心是强大的Mediapipe ,它是google的一个开源项目:
| 功能 | 详细 |
|---|---|
| 人脸检测 FaceMesh | 从图像/视频中重建出人脸的3D Mesh |
| 人像分离 | 从图像/视频中把人分离出来 |
| 手势跟踪 | 21个关键点的3D坐标 |
| 人体3D识别 | 33个关键点的3D坐标 |
| 物体颜色识别 | 可以把头发检测出来,并图上颜色 |
Mediapipe Dev

以上是Mediapipe的几个常用功能 ,这几个功能我们会在后续一一讲解实现
Python安装Mediapipe
pip install mediapipe==0.8.9.1
也可以用 setup.py 安装
https://github.com/google/mediapipe
项目环境
Python 3.7
Mediapipe 0.8.9.1
Numpy 1.21.6
OpenCV-Python 4.5.5.64
OpenCV-contrib-Python 4.5.5.64

实测也支持Python3.8-3.9
手势动作捕捉部分
手势特征点图

实时动作捕捉
本项目在Unity中实现实时动作捕捉的核心是通过本地UDP与socket 进行通信
关于数据文件部分,详细可以查看OpenCV+Mediapipe人物动作捕捉与Unity引擎的结合中对数据文件部分的讲解和使用

核心代码
摄像头捕捉部分:
import cv2
cap = cv2.VideoCapture(0) #OpenCV摄像头调用:0=内置摄像头(笔记本) 1=USB摄像头-1 2=USB摄像头-2
while True:
success, img = cap.read()
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) #cv2图像初始化
cv2.imshow("HandsImage", img) #CV2窗体
cv2.waitKey(1) #关闭窗体
视频帧率计算
import time
#帧率时间计算
pTime = 0
cTime = 0
while True
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 255), 3) #FPS的字号,颜色等设置
Socket通信:
定义Localhost和post端口地址
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
serverAddressPort = ("127.0.0.1", 5052) # 定义IP和端口
# 发送数据
sock.sendto(str.encode(str(data)), serverAddressPort)
手势动作捕捉:
if hands:
# Hand 1
hand = hands[0]
lmList = hand["lmList"]
for lm in lmList:
data.extend([lm[0], h - lm[1], lm[2]])
完整代码
Hands.py
from cvzone.HandTrackingModule import HandDetector
import cv2
import socket
cap = cv2.VideoCapture(0)
cap.set(3, 1280)
cap.set(4, 720)
success, img = cap.read()
h, w, _ = img.shape
detector = HandDetector(detectionCon=0.8, maxHands=2)
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
serverAddressPort = ("127.0.0.1", 5052)
while True:
success, img = cap.read()
hands, img = detector.findHands(img)
data = []
if hands:
# Hand 1
hand = hands[0]
lmList = hand["lmList"]
for lm in lmList:
data.extend([lm[0], h - lm[1], lm[2]])
sock.sendto(str.encode(str(data)), serverAddressPort)
cv2.imshow("Image", img)
cv2.waitKey(1)
py代码效果

Unity 部分
建模
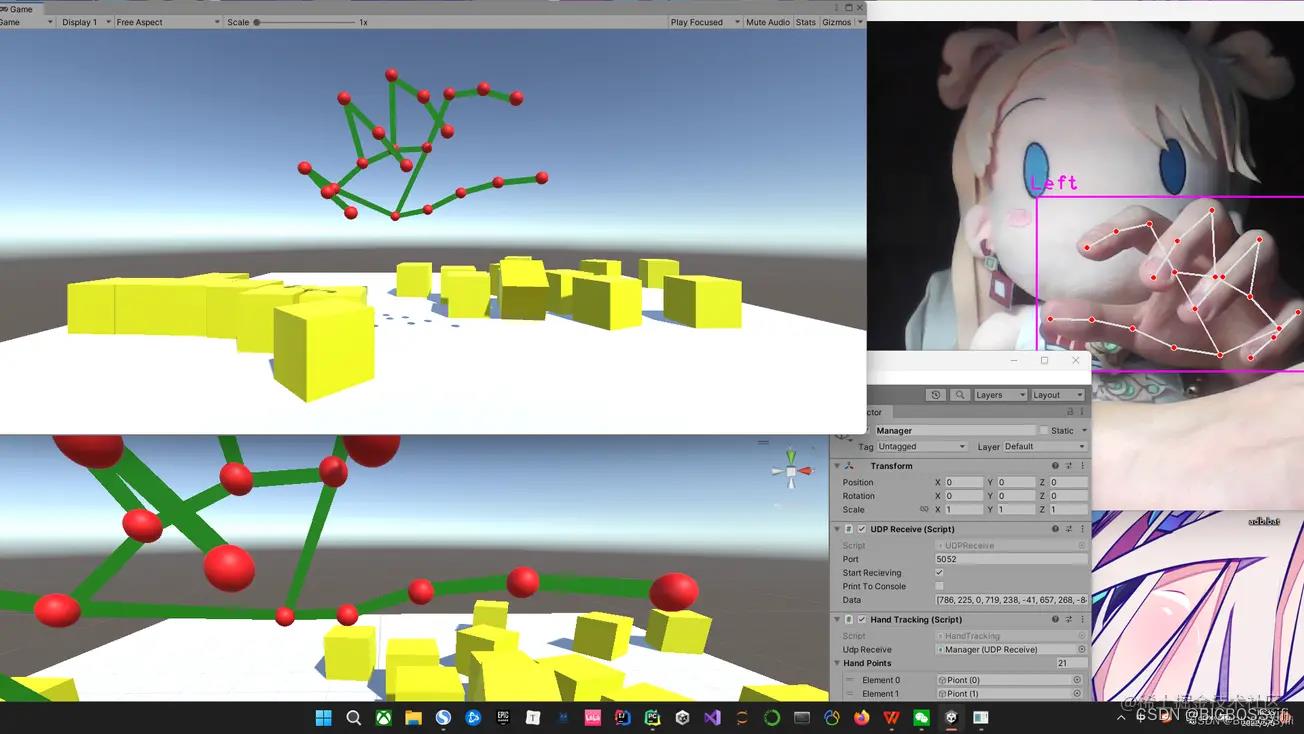
在Unity中,我们需要搭建一个人物的模型,这里需要一个21个Sphere作为手势的特征点和21个Cube作为中间的支架
具体文件目录如下:

Line的编号对应手势模型特征点
Unity代码
UDP.cs
本代码功能将Socket发送的数据进行接收
using UnityEngine;
using System;
using System.Text;
using System.Net;
using System.Net.Sockets;
using System.Threading;
public class UDPReceive : MonoBehaviour
Thread receiveThread;
UdpClient client;
public int port = 5052;
public bool startRecieving = true;
public bool printToConsole = false;
public string data;
public void Start()
receiveThread = new Thread(
new ThreadStart(ReceiveData));
receiveThread.IsBackground = true;
receiveThread.Start();
private void ReceiveData()
client = new UdpClient(port);
while (startRecieving)
try
IPEndPoint anyIP = new IPEndPoint(IPAddress.Any, 0);
byte[] dataByte = client.Receive(ref anyIP);
data = Encoding.UTF8.GetString(dataByte);
if (printToConsole) print(data);
catch (Exception err)
print(err.ToString());
UDP.cs接收效果图
无数据接收下:

数据通信接收下


Line.cs
这里是每个Line对应cs文件,实现功能:使特征点和Line连接在一起
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class LineCode : MonoBehaviour
LineRenderer lineRenderer;
public Transform origin;
public Transform destination;
void Start()
lineRenderer = GetComponent<LineRenderer>();
lineRenderer.startWidth = 0.1f;
lineRenderer.endWidth = 0.1f;
// 连接两个点
void Update()
lineRenderer.SetPosition(0, origin.position);
lineRenderer.SetPosition(1, destination.position);
Hands.cs
这里是读取上文识别并保存的手势动作数据,并将每个子数据循环遍历到每个Sphere点,使特征点随着摄像头的捕捉进行运动
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class HandTracking : MonoBehaviour
public UDPReceive udpReceive;
public GameObject[] handPoints;
void Start()
void Update()
string data = udpReceive.data;
data = data.Remove(0, 1);
data = data.Remove(data.Length - 1, 1);
print(data);
string[] points = data.Split(',');
print(points[0]);
for (int i = 0; i < 21; i++)
float x = 7-float.Parse(points[i * 3]) / 100;
float y = float.Parse(points[i * 3 + 1]) / 100;
float z = float.Parse(points[i * 3 + 2]) / 100;
handPoints[i].transform.localPosition = new Vector3(x, y, z);
最终实现效果

Good Luck,Have Fun and Happy Coding!!!
以上是关于基于mediapipe的动作捕捉和Unity的球棍模型同步的主要内容,如果未能解决你的问题,请参考以下文章