pytorch从零开始用语义分割网络(deeplab3+)训练自己的数据集
Posted 大黑山修道
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了pytorch从零开始用语义分割网络(deeplab3+)训练自己的数据集相关的知识,希望对你有一定的参考价值。
参考文档:
https://blog.csdn.net/qq_43631789/article/details/102700231
https://blog.csdn.net/qq_39056987/article/details/106455828
https://blog.csdn.net/qq_36766560/article/details/110009622
https://blog.csdn.net/gsgs1234/article/details/115267777
1. 制作自己数据集(labelme)
使用labelme对自己采集的图像进行标注。
安装和使用过程略。
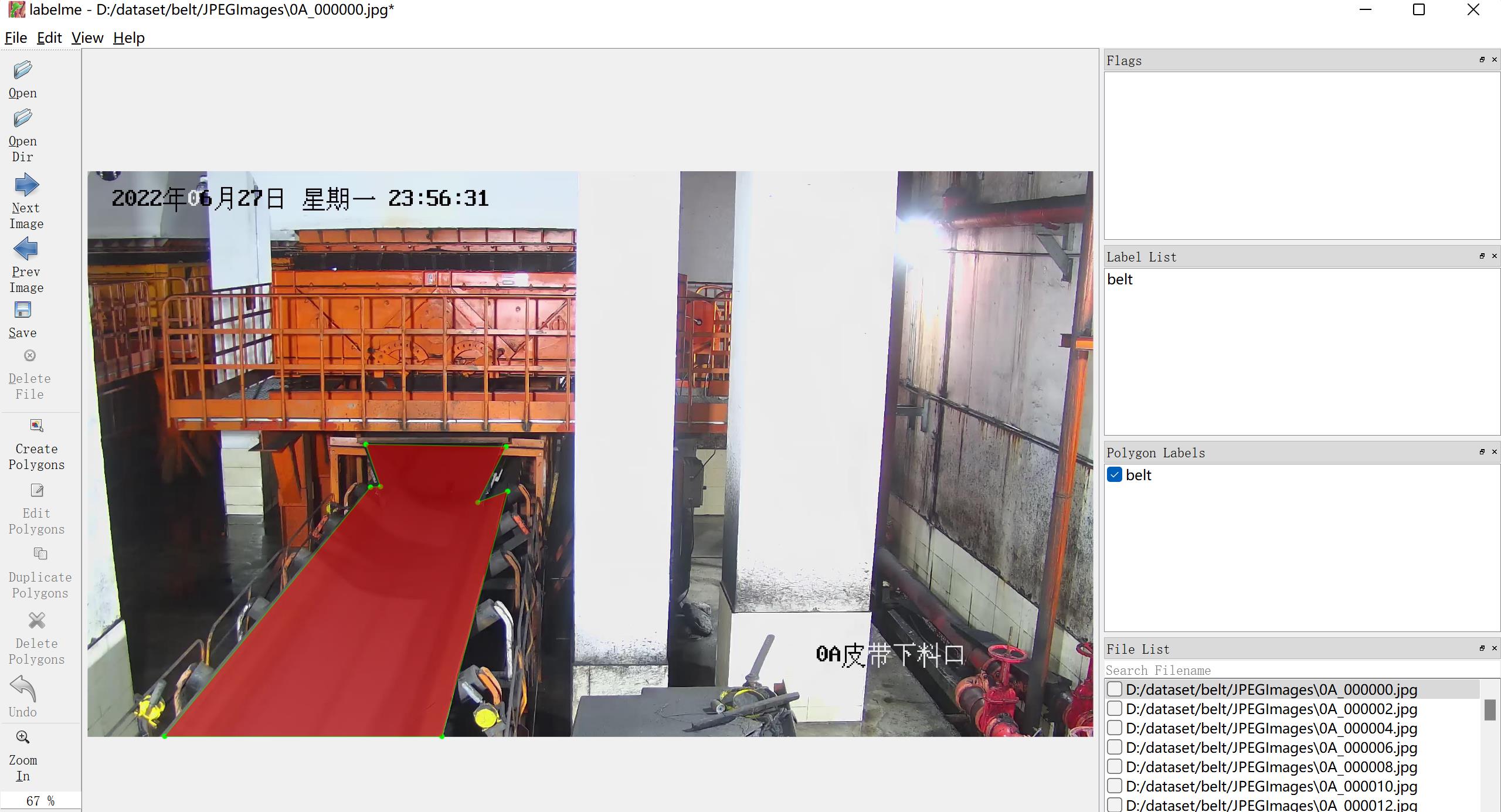
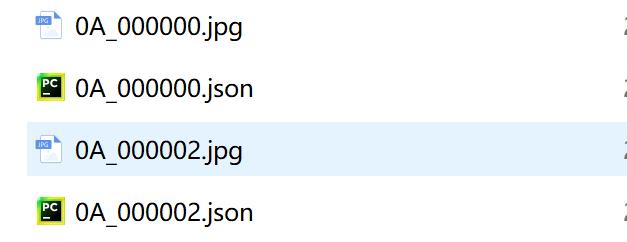
然后标注的json文件默认保存在图像所在的目录内。标注完成之后一般是这样的:
2. 下载deeplab3+源码包(pytorch)
github地址:
https://github.com/jfzhang95/pytorch-deeplab-xception
下载代码包至自己的指定位置:

3. 将数据集转换为VOC格式
3.1 数据结构介绍
我们首先新建一些列文件夹,文件结构如下:
- ImageSets
- Segmentation
- train.txt
-train.txt
- val.txt
- JPEGImages
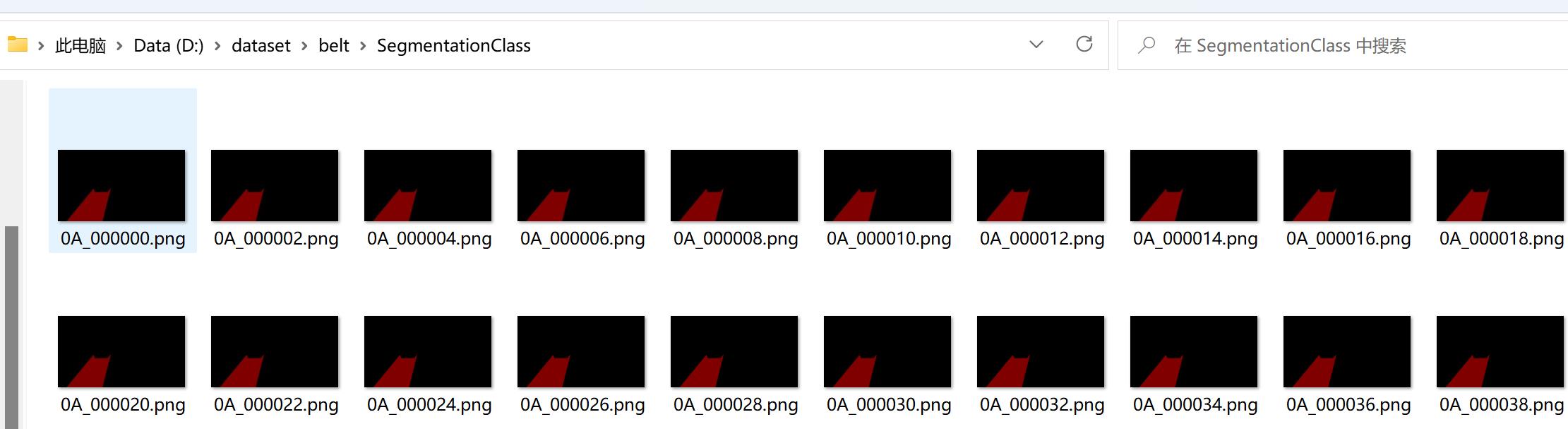
- SegmentationClass
ImageSets目录内单放一个Segmentation文件夹,然后Segmentation目录下需要制作3个txt文件:train.txt,train.txt,val.txt 用来表示训练集,验证集,测试集的划分信息。制作方式后面介绍。
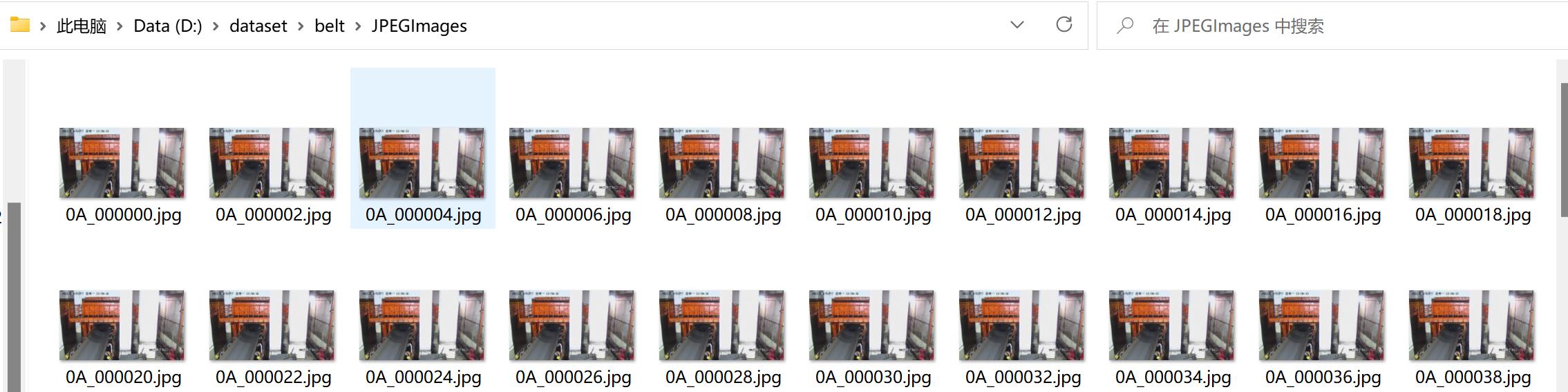
JPEGImages 目录内用于存放图像数据集的原图。
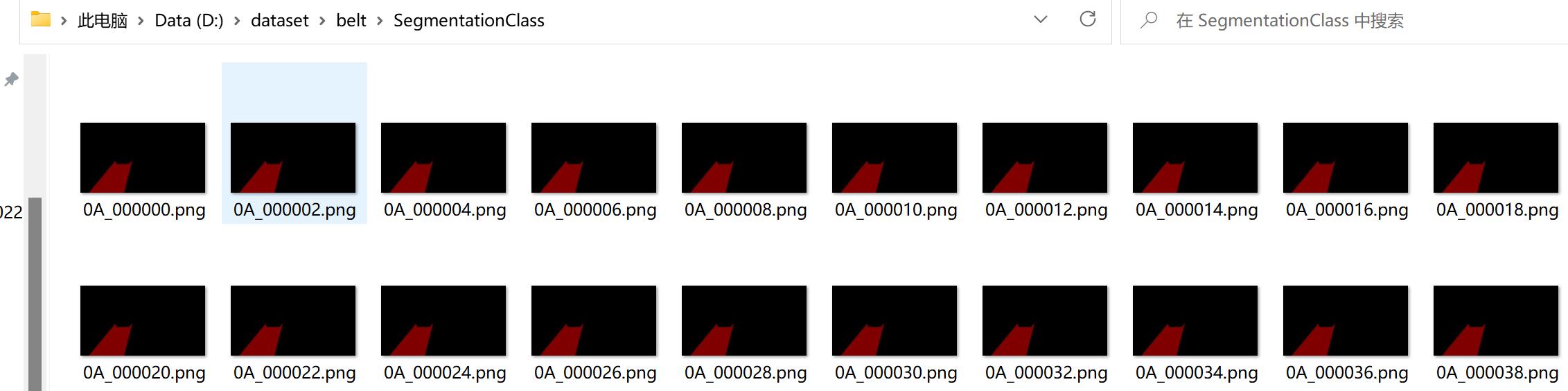
SegmentationClass 目录放置的mask图像,mask是原图根据标注信息json文件生成的,生成方式后面介绍,注意mask的图像与原图的名称一一对应。
3.2 生成3个txt文件
txt的格式是每一行一个图像文件名,无后缀,不需要地址。
train,trainval,val自己按照一定比例划分
代码如下:
import os
import numpy as np
root = r"D:\\dataset\\belt\\JPEGImages"
output = r"D:\\dataset\\belt\\ImageSets\\Segmentation"
filename = []
#从存放原图的目录中遍历所有图像文件
# dirs = os.listdir(root)
for root, dir, files in os.walk(root):
for file in files:
print(file)
filename.append(file[:-4]) # 去除后缀,存储
#打乱文件名列表
np.random.shuffle(filename)
#划分训练集、测试集,默认比例6:2:2
train = filename[:int(len(filename)*0.6)]
trainval = filename[int(len(filename)*0.6):int(len(filename)*0.8)]
val = filename[int(len(filename)*0.8):]
#分别写入train.txt, test.txt
with open(os.path.join(output,'train.txt'), 'w') as f1, open(os.path.join(output,'trainval.txt'), 'w') as f2,open(os.path.join(output,'val.txt'), 'w') as f3:
for i in train:
f1.write(i + '\\n')
for i in trainval:
f2.write(i + '\\n')
for i in val:
f3.write(i + '\\n')
print('成功!')
3.3 根据json,制作对应的mask图像
我们首先将所有的json文件存放到单独的文件夹,实例中表示为: "D:\\\\dataset\\\\json"
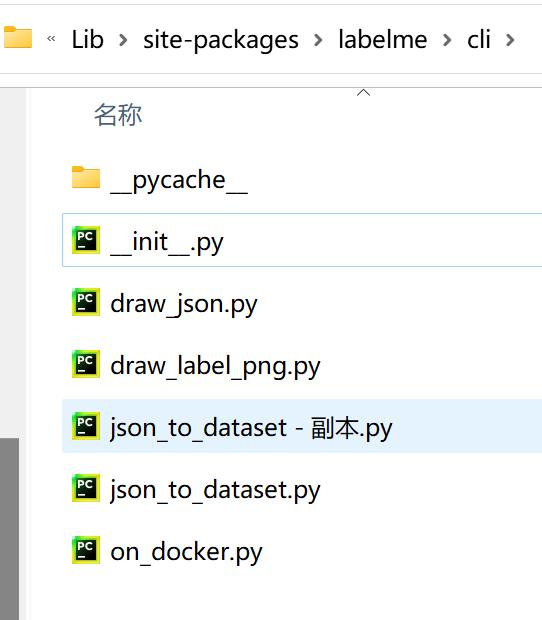
制作mask的图像需要用到labelme的源码。
我们首先找到labelme源码的安装位置:
用anaconda安装的话,windows一般是Users\\用户名\\.conda\\envs\\环境名\\Lib\\site-packages\\labelme。
然后找到labelme\\cli的位置,先备份一下原来的json_to_dataset.py文件,然后用下面的代码覆盖掉原来的json_to_dataset.py。
import argparse
import base64
import json
import os
import os.path as osp
import PIL.Image
import yaml
from labelme.logger import logger
from labelme import utils
path = "D:\\\\dataset\\\\json"
dirs = os.listdir(path)
def label(json_file, out_dir, label_name_to_value):
# print("json.load(open(json_file))=", json_file)
# json_file = os.path.join(path, json_file)
# print("json.load(open(json_file))=", json_file)
data = json.load(open(json_file))
if data['imageData']:
imageData = data['imageData']
else:
imagePath = os.path.join(os.path.dirname(json_file), data['imagePath'])
with open(imagePath, 'rb') as f:
imageData = f.read()
imageData = base64.b64encode(imageData).decode('utf-8')
img = utils.img_b64_to_arr(imageData)
for shape in sorted(data['shapes'], key=lambda x: x['label']):
label_name = shape['label']
if label_name in label_name_to_value:
label_value = label_name_to_value[label_name]
else:
label_value = len(label_name_to_value)
label_name_to_value[label_name] = label_value
lbl = utils.shapes_to_label(img.shape, data['shapes'], label_name_to_value)
label_names = [None] * (max(label_name_to_value.values()) + 1)
for name, value in label_name_to_value.items():
label_names[value] = name
lbl_viz = utils.draw_label(lbl, img, label_names)
PIL.Image.fromarray(img).save(osp.join(out_dir, 'img.png'))
utils.lblsave(osp.join(out_dir, 'label.png'), lbl)
PIL.Image.fromarray(lbl_viz).save(osp.join(out_dir, 'label_viz.png'))
with open(osp.join(out_dir, 'label_names.txt'), 'w') as f:
for lbl_name in label_names:
f.write(lbl_name + '\\n')
logger.warning('info.yaml is being replaced by label_names.txt')
info = dict(label_names=label_names)
with open(osp.join(out_dir, 'info.yaml'), 'w') as f:
yaml.safe_dump(info, f, default_flow_style=False)
logger.info('Saved to: '.format(out_dir))
def main():
logger.warning('This script is aimed to demonstrate how to convert the'
'JSON file to a single image dataset, and not to handle'
'multiple JSON files to generate a real-use dataset.')
parser = argparse.ArgumentParser()
parser.add_argument('json_file_dir')
parser.add_argument('-o', '--out', default=None)
args = parser.parse_args()
label_name_to_value = '_background_': 0
for json_file in dirs:
# print("json_file=", json_file)
if args.out is None:
json_file = os.path.join(path, json_file)
out_dir = osp.basename(json_file).replace('.', '_')
out_dir = osp.join(osp.dirname(json_file), out_dir)
else:
# out_dir = args.out
json_file = os.path.join(path, json_file)
out_dir = osp.basename(json_file).replace('.', '_')
out_dir = osp.join(osp.dirname(args.out), out_dir)
# print('out_dir=',out_dir)
if not osp.exists(out_dir):
os.mkdir(out_dir)
label(json_file, out_dir, label_name_to_value)
if __name__ == '__main__':
main()
然后在cli目录输入命令行:
python .\\json_to_dataset.py json_file_dir -o D:\\dataset\\output_mask\\
json_file_dir :必须带的参数
-o :输出目录
然后输出目录就会增加非常多的文件夹:
每个文件夹下有5个文件,而我们需要将所有的label.png文件放入到VOC格式数据集中的SegmentationClass目录,并且需要改成与原图对应的名称。
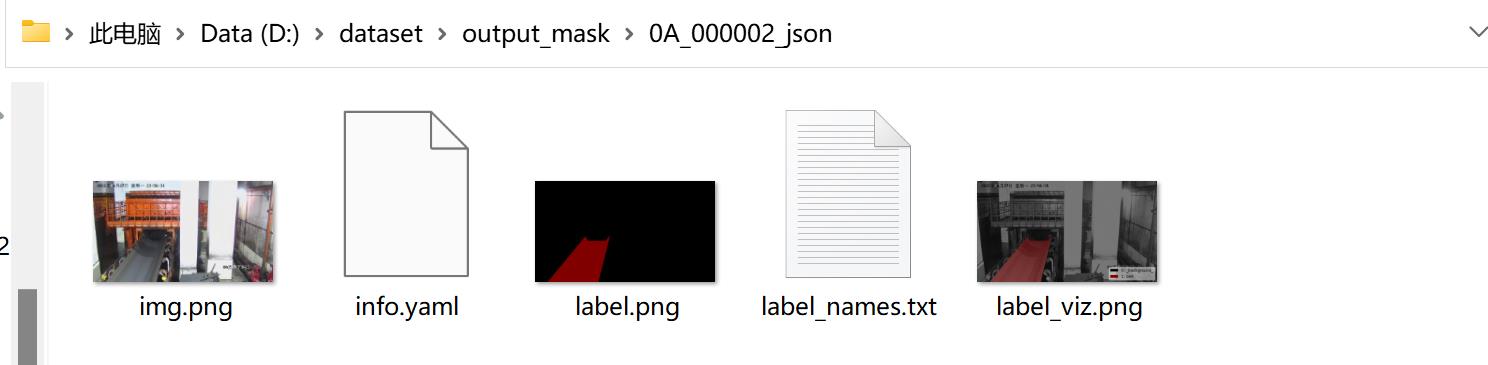
类别放在label_names.txt里,默认会有一个_background_。所以我们正常的语义分割至少要有两类。
抽离label.png的脚本:
import os
import shutil
inputdir = 'D:\\\\dataset\\\\output_mask'
outputdir = 'D:\\\\dataset\\\\belt\\\\SegmentationClass'
for dir in os.listdir(inputdir):
# 设置旧文件名(就是路径+文件名)
oldname = inputdir + os.sep + dir + os.sep + 'label.png' # os.sep添加系统分隔符
print("oldname=",oldname)
png_id = ''
print("dir=",oldname)
# 之前的mask命名都是以xxx_json的目录明明,现在需要把最后的_json部分去除,还原原图的名称
for i in range(len(dir.split('_'))) :
if i == len(dir.split('_'))-1:
continue
else:
# 原图的名称中可有可能包含一个或多个_,除了最后一个_,其余都保留。
if png_id != '':
png_id += '_'
png_id += dir.split('_')[i]
# 设置新文件名
newname = outputdir + os.sep + png_id + '.png'
shutil.copyfile(oldname, newname) # 用os模块中的rename方法对文件改名
print(oldname, '======>', newname)
执行结束后就可以发现SegmentationClass目录内放入了mask图像。
4. 修改deeplab+源码,增加自己的数据集
4.1 mypath.py 中加入自己数据集的路径
实例中增加的数据集名称为belt
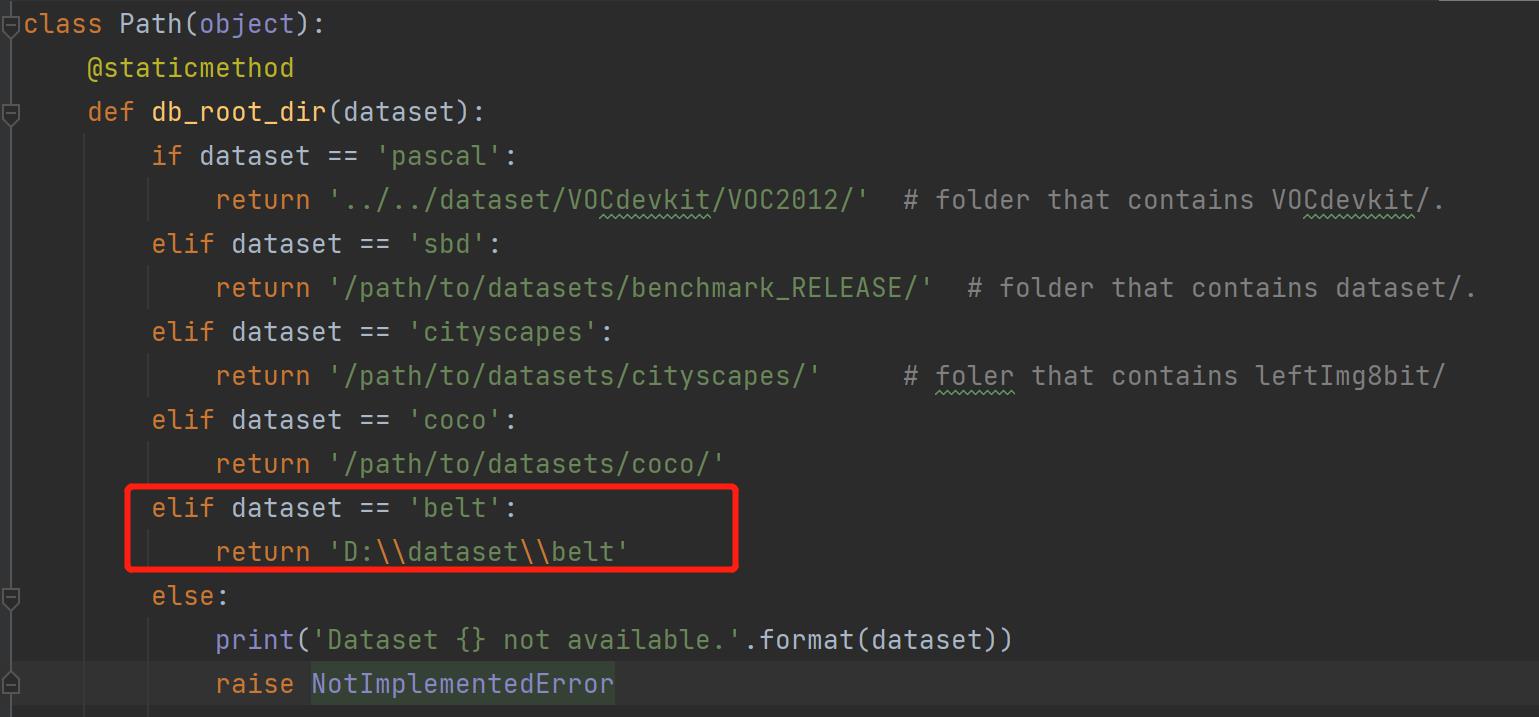
belt下的文件结构就是之前提到的VOC结构:
-belt
- ImageSets
- Segmentation
- train.txt
-train.txt
- val.txt
- JPEGImages
- SegmentationClass
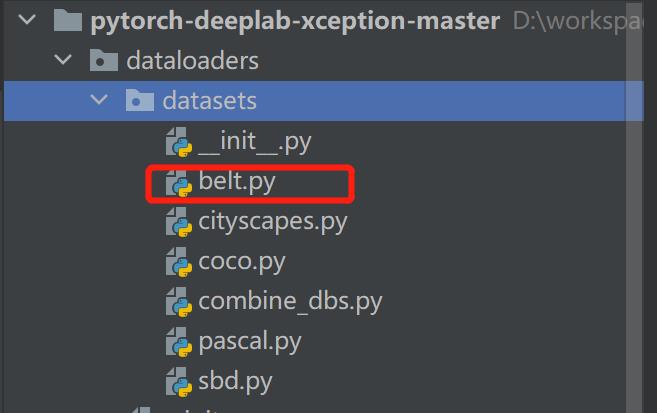
4.2 在dataloaders/datasets目录下添加文件
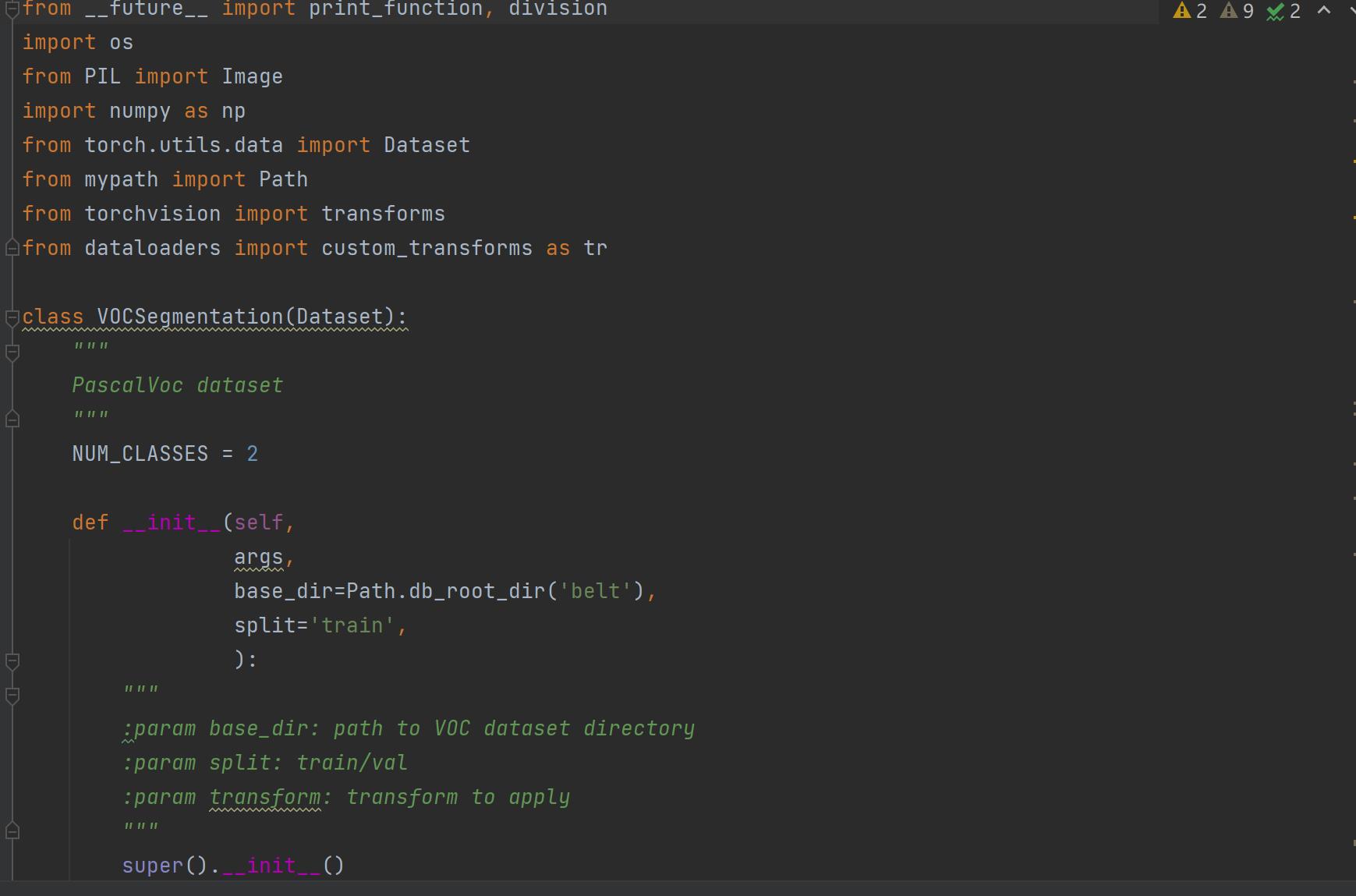
复制一份pascal.py文件,并重命名为自己的数据集名称
然后打开自己的数据集py文件,修改文件内的类别数和数据集名称:
4.3 修改dateloaders目录下utils.py
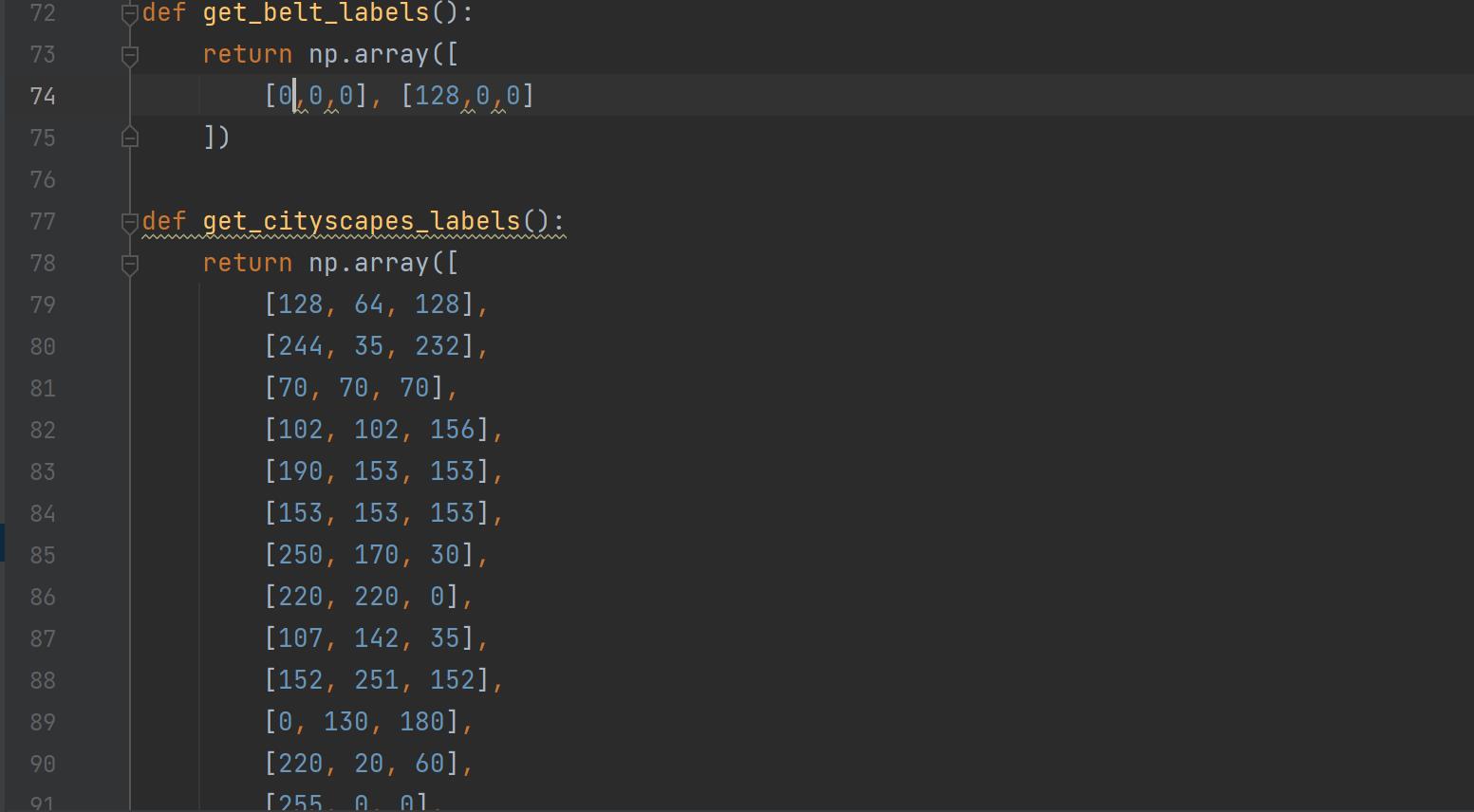
搜素def get_cityscapes_labels()函数,然后在上方添加自己数据集的函数,例如get_belt_labels().
这个函数的主要意思就是给自己每个类设置一个掩膜颜色,有多少个类,就设置多少种颜色。
然后在decode_segmap函数内添加代码,其中n_classes是你要分割的类别数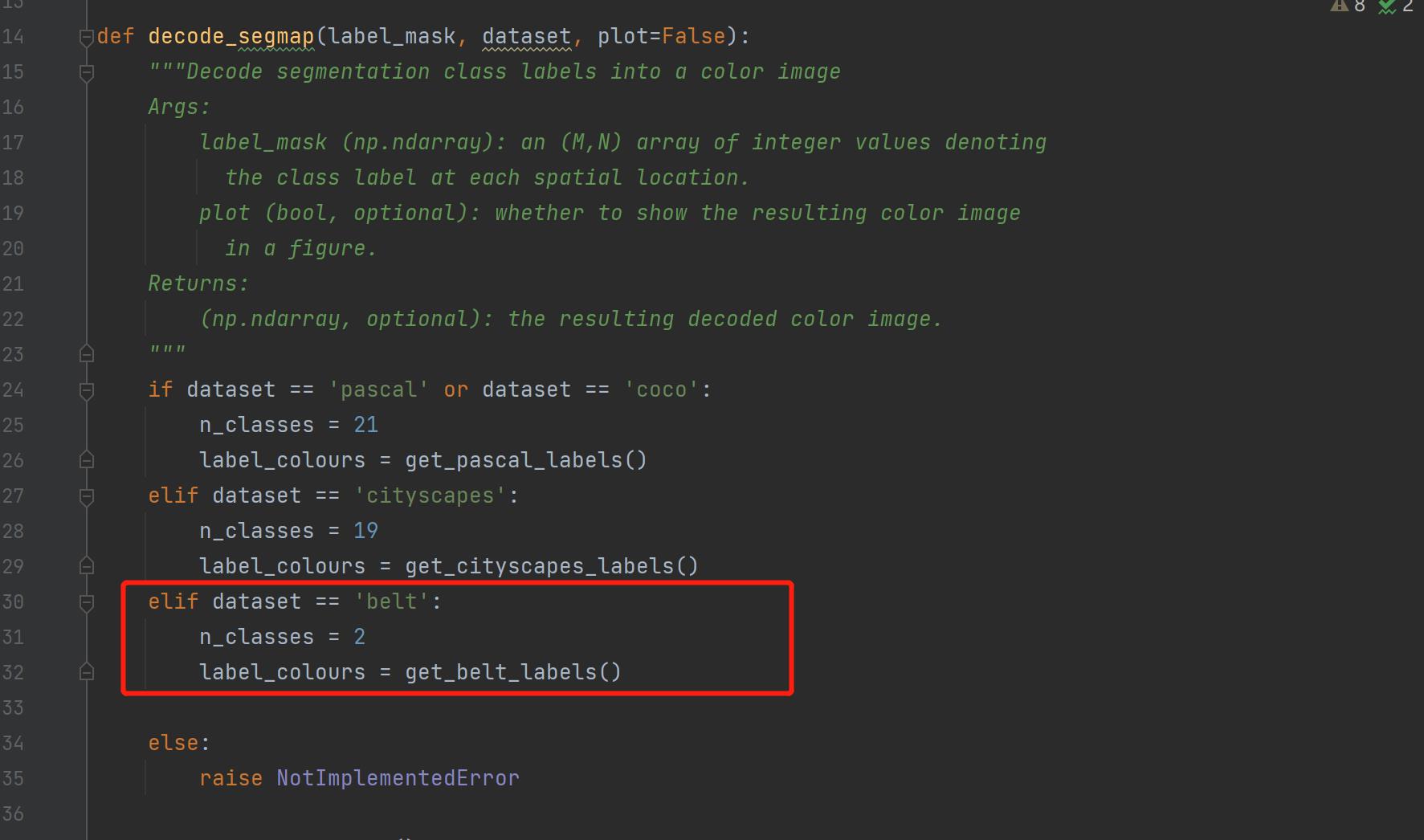
4.4 在dataloaders目录下修改__init__.py
在第一行添加数据集名称,复制’pascal’数据集描述,把名称修改为自己数据集的名字
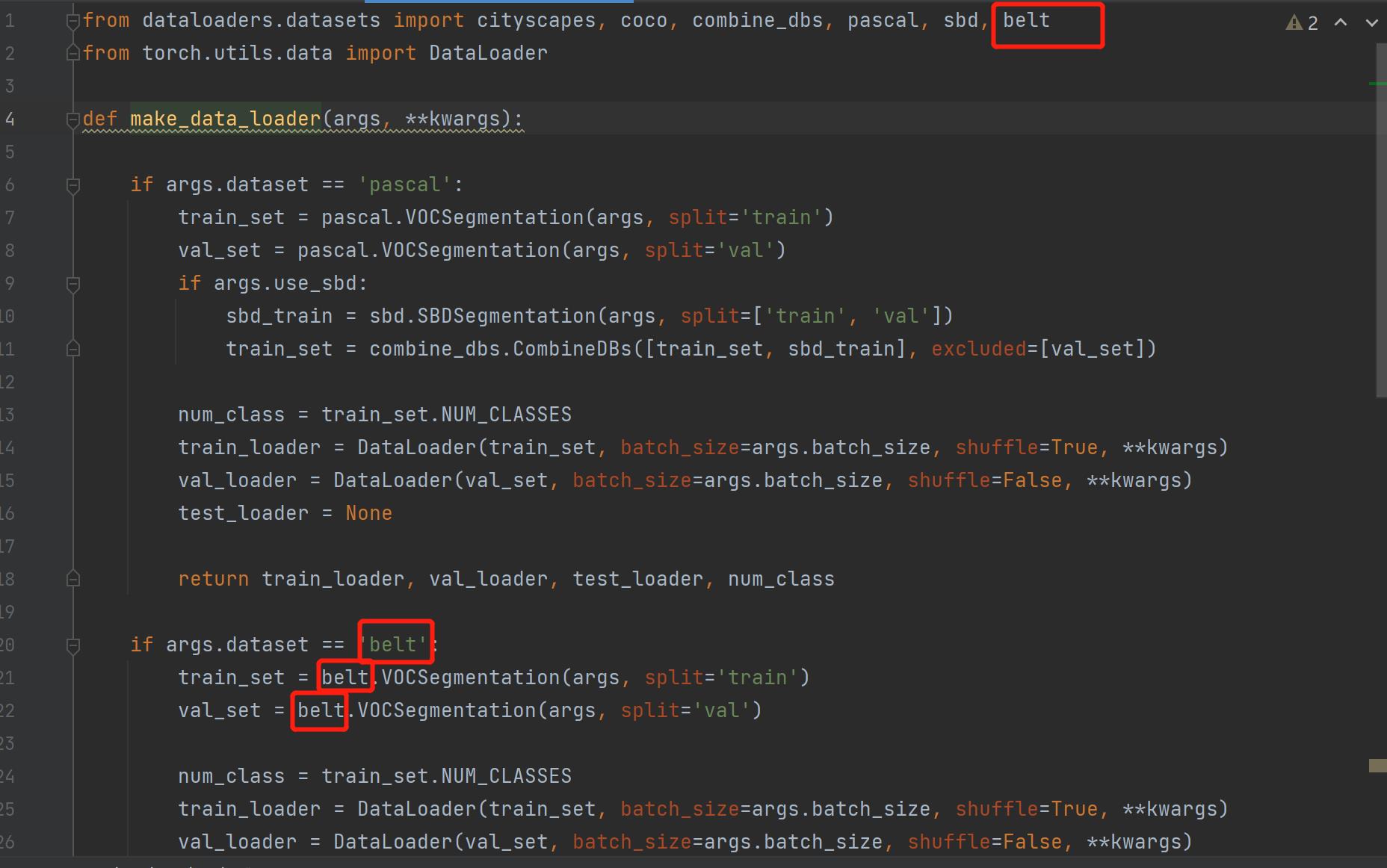
if args.dataset == 'belt':
train_set = belt.VOCSegmentation(args, split='train')
val_set = belt.VOCSegmentation(args, split='val')
num_class = train_set.NUM_CLASSES
train_loader = DataLoader(train_set, batch_size=args.batch_size, shuffle=True, **kwargs)
val_loader = DataLoader(val_set, batch_size=args.batch_size, shuffle=False, **kwargs)
test_loader = None
return train_loader, val_loader, test_loader, num_class
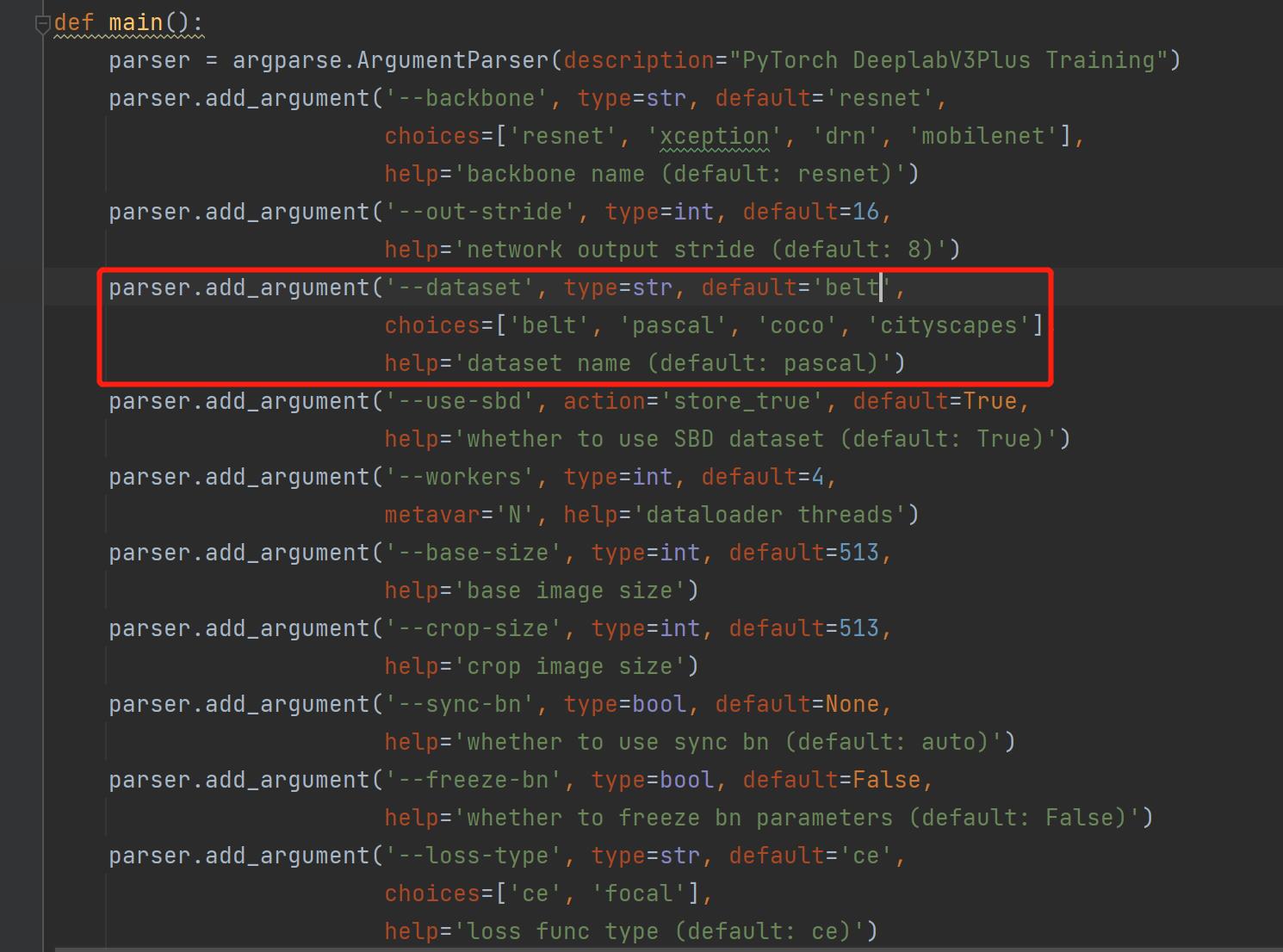
4.5 在同级目录中修改train.py约185行添加自己数据集的名称(可以设置为默认)
5. 开始训练数据
输入指令:
python train.py --backbone mobilenet --lr 0.007 --workers 1 --epochs 50 --batch-size 8 --gpu-ids 0 --checkname deeplab-mobilenet
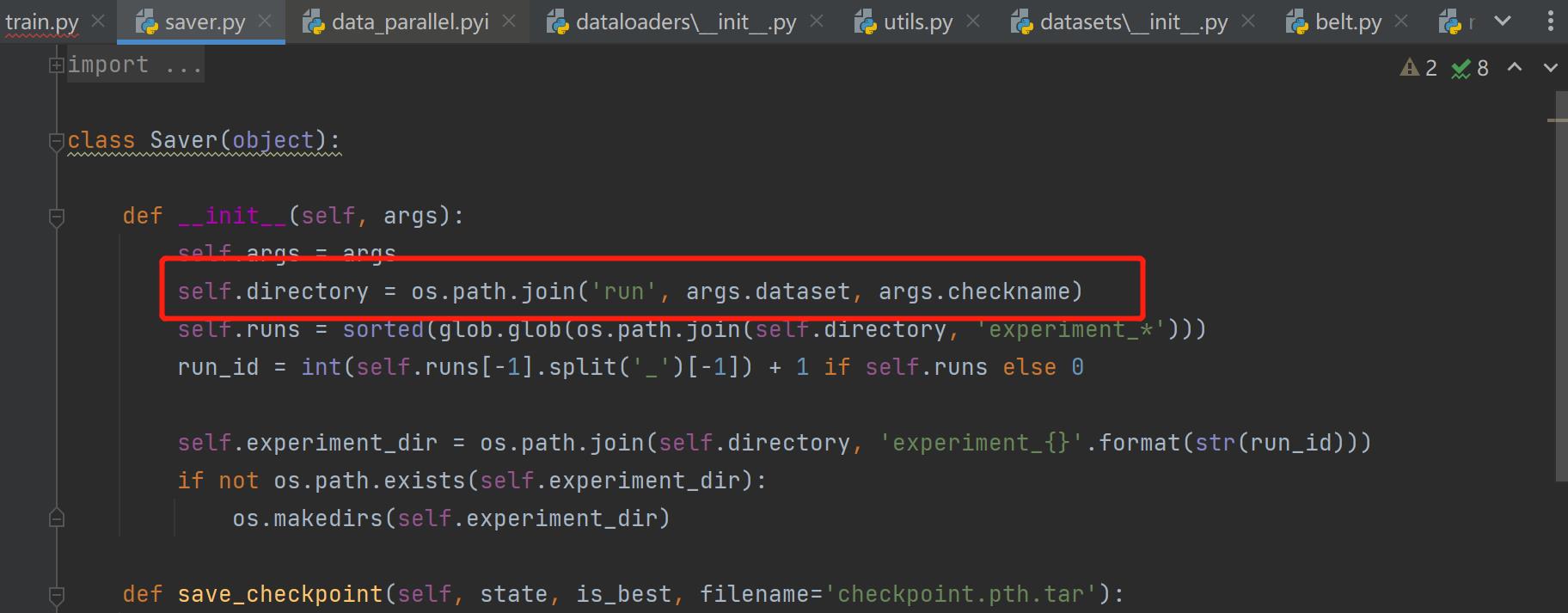
模型保存的路径是在代码内是设置的,在saver.py可以看到保存的路径:run/[datasetname]/[checkname],在示例中的路径就是:run/belt/deeplab-mobilenet
保存的目录中可能会存在很多experiment_*的目录,这是每一此训练都会保存在一个experiment_的目录内,最新的训练结果保存在最后id的目录上。此外,最优的模型还会保存到run/[datasetname]/[checkname]中的model_best.pth.tar中。

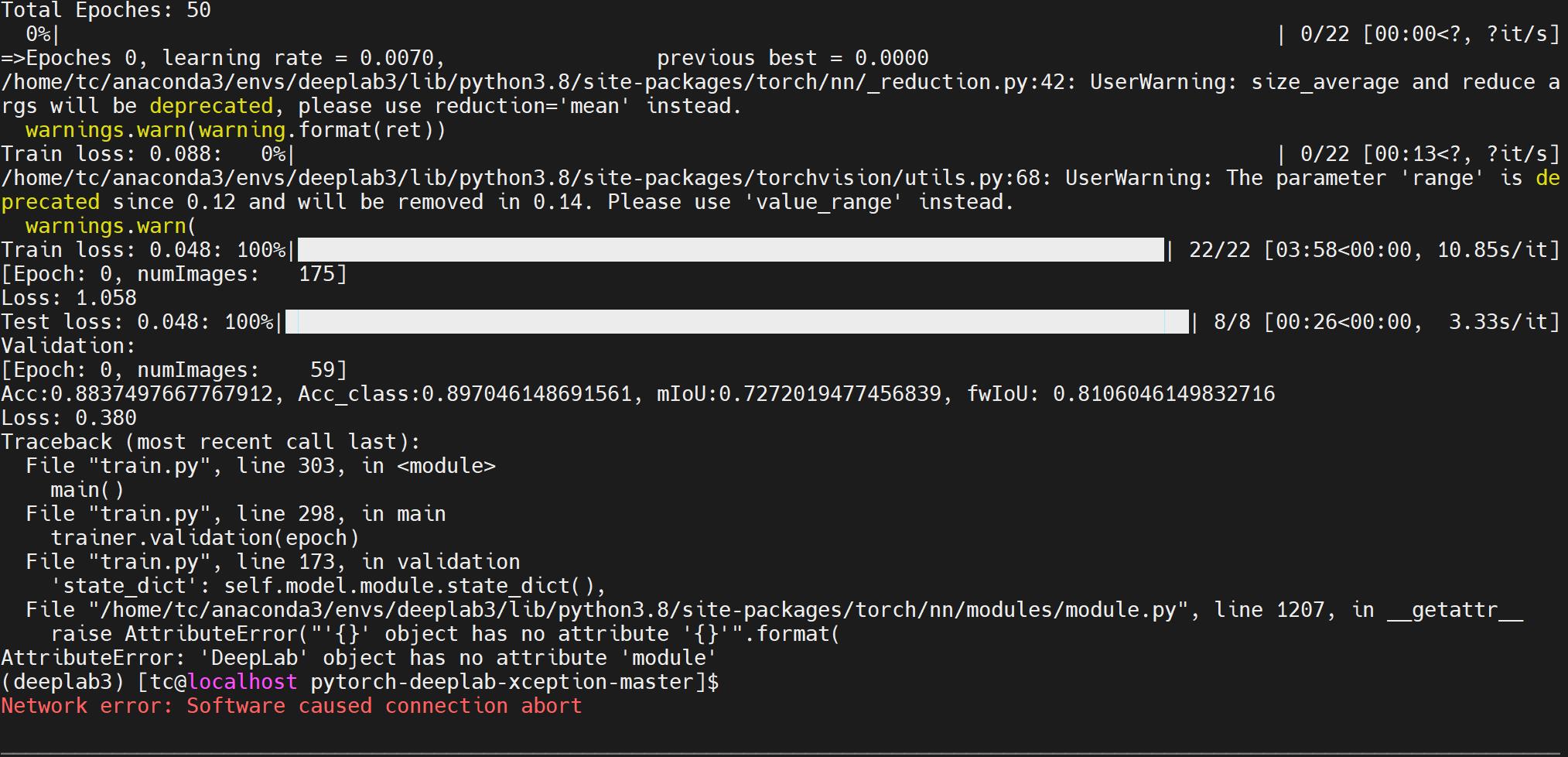
若是出现报错:
AttributeError: ‘DeepLab’ object has no attribute ‘module’
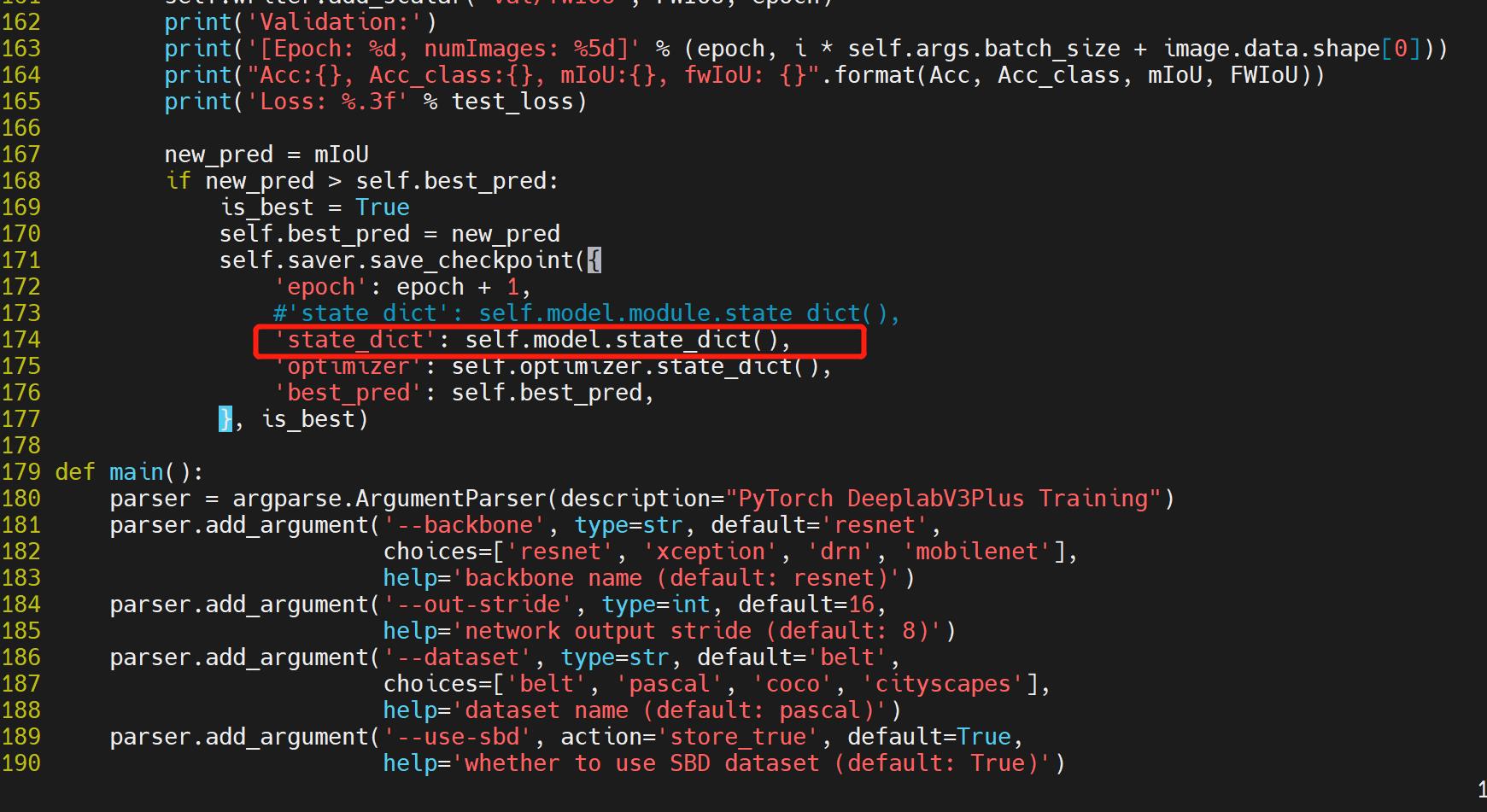
解决方式:
打开train.py,找到报错的地方 'state_dict': self.model.module.state_dict(),修改为
`'state_dict': self.model.state_dict()
6. 测试
源码中没有测试代码,需要自己放入一个测试py文件。
修改–in-path为数据集的测试图片,最后的结果保存在–in-path中
#
# demo.py
#
import argparse
import os
import numpy as np
import time
from modeling.deeplab import *
from dataloaders import custom_transforms as tr
from PIL import Image
from torchvision import transforms
from dataloaders.utils import *
from torchvision.utils import make_grid, save_image
def main():
parser = argparse.ArgumentParser(description="PyTorch DeeplabV3Plus Training")
parser.add_argument('--in-path', type=str, default='/root/home/zyx/Seg552_VOC/test',
help='image to test')
# parser.add_argument('--out-path', type=str, required=True, help='mask image to save')
parser.add_argument('--backbone', type=str, default='resnet',
choices=['resnet', 'xception', 'drn', 'mobilenet'],
help='backbone name (default: resnet)')
parser.add_argument('--ckpt', type=str, default='deeplab-resnet.pth',
help='saved model')
parser.add_argument('--out-stride', type=int, default=16,
help='network output stride (default: 8)')
parser.add_argument('--no-cuda', action='store_true', default=False,
help='disables CUDA training')
parser.add_argument('--gpu-ids', type=str, default='0',
help='use which gpu to train, must be a \\
comma-separated list of integers only (default=0)')
parser.add_argument('--dataset', type=str, default='belt',
choices=['pascal', 'coco', 'cityscapes','belt'],
help='dataset name (default: pascal)')
parser.add_argument('--crop-size', type=int, default=513,
help='crop image size')
parser.add_argument('--num_classes', type=int, default=2,
help='crop image size')
parser.add_argument('--sync-bn', type=bool, default=None,
help='whether to use sync bn (default: auto)')
parser.add_argument('--freeze-bn', type=bool, default=False,
help='whether to freeze bn parameters (default: False)')
args = parser.parse_args()
args.cuda = not args.no_cuda and torch.cuda.is_available()
if args.cuda:
try:
args.gpu_ids = [int(s) for s in args.gpu_ids.split(',')]
except ValueError:
raise ValueError('Argument --gpu_ids must be a comma-separated list of integers only')
if args.sync_bn is None:
if args.cuda and len(args.gpu_ids) > 1:
args.sync_bn = True
else:
args.sync_bn = False
model_s_time = time.time()
model = DeepLab(num_classes=args.num_classes,
backbone=args.backbone,
output_stride=args.out_stride,
sync_bn=args.sync_bn,
freeze_bn=args.freeze_bn)
model = nn.DataParallel(model)
ckpt = torch.load(args.ckpt, map_location='cpu')
model.load_state_dict(ckpt['state_dict'])
model = model.cuda()
model_u_time = time.time()
model_load_time = model_u_time-model_s_time
print("model load time is ".format(model_load_time))
composed_transforms = transforms.Compose([
tr.Normalize(mean=(0.485, 0.456, 0.406), std=(0.229, 0.224, 0.225)),
tr.ToTensor()])
for name in os.listdir(args.in_path):
s_time = time.time()
image = Image.open(args.in_path+"/"+name).convert('RGB')
# image = Image.open(args.in_path).convert('RGB')
target = Image.open(args.in_path+"/"+name).convert('L')
sample = 'image': image, 'label': target
tensor_in = composed_transforms(sample)['image'].unsqueeze(0)
model.eval()
if args.cuda:
tensor_in = tensor_in.cuda()
with torch.no_grad():
output = model(tensor_in)
grid_image = make_grid(decode_seg_map_sequence(torch.max(output[:3], 1)[1].detach().cpu().numpy()),
3, normalize=False, range=(0, 255))
save_image(grid_image,args.in_path+"/"+"_mask.png".format(name[0:-4]))
u_time = time.time()
img_time = u_time-s_time
print("image: time: ".format(name,img_time))
# save_image(grid_image, args.out_path)
# print("type(grid) is: ", type(grid_image))
# print("grid_image.shape is: ", grid_image.shape)
print("image save in in_path.")
if __name__ == "__main__":
main()
# python demo.py --in-path your_file --out-path your_dst_file
注意点:
参数--dataset代码中加入自己的类:
parser.add_argument('--dataset', type=str, default='belt',
choices=['pascal', 'coco', 'cityscapes','belt'],
help='dataset name (default: pascal)')
输入测试指令:
python testdemo.py --dataset belt --num_classes 2 --ckpt run/Seg552/deeplab-mobilenet/checkpoint.pth.tar --backbone mobilenet
常见报错:
1. state_dict错误
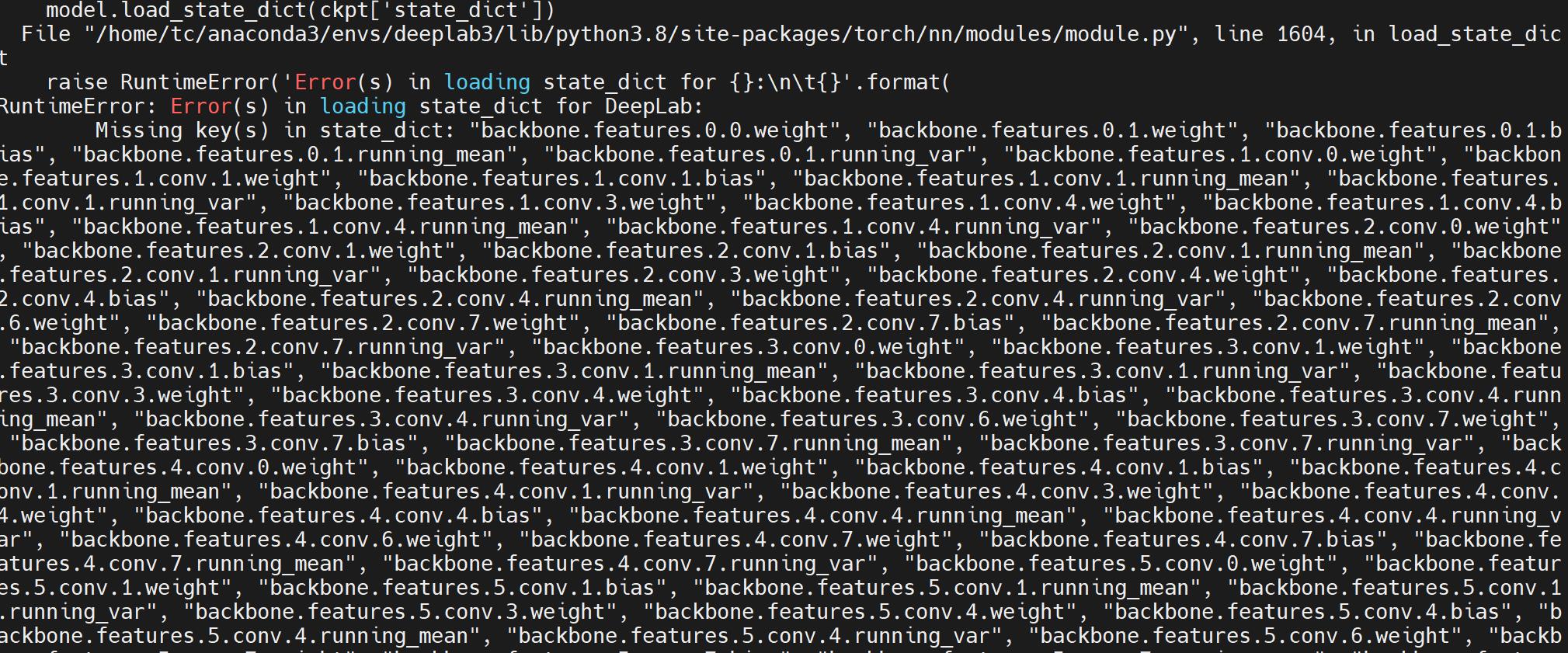
RuntimeError: Error(s) in loading state_dict for DeepLab: Missing key(s) in state_dict: "
在原版中会出现,在ckpt = torch.load(args.ckpt, map_location='cpu')之前加入 model = nn.DataParallel(model) 即可。
2. CUDA报错
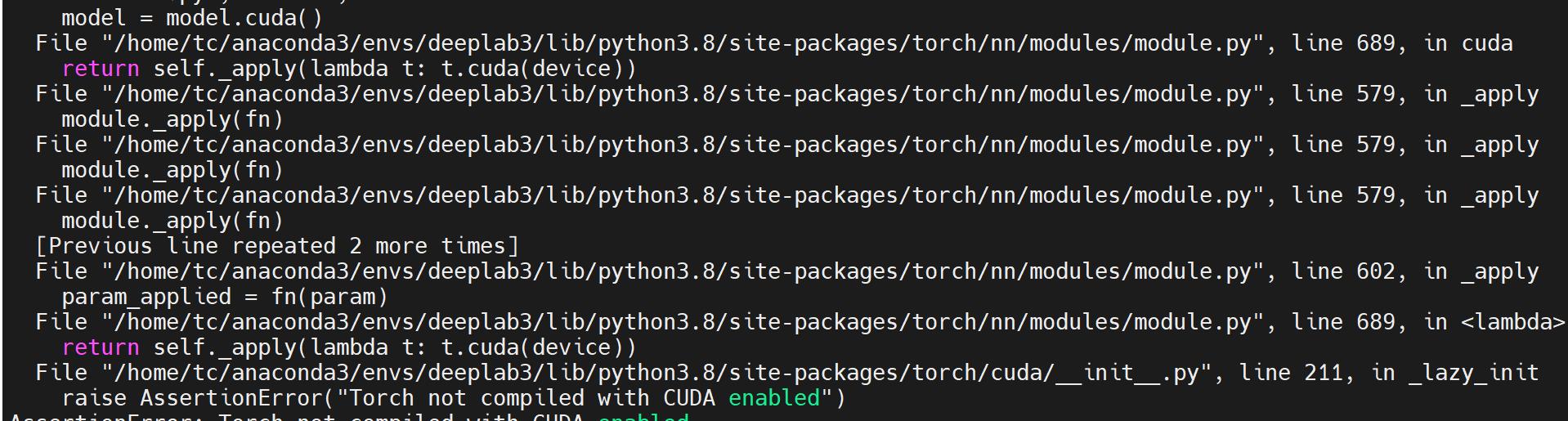
报错如下:raise AssertionError("Torch not compiled with CUDA enabled") AssertionError: Torch not compiled with CUDA enabled
解决方式:
- 可能是在gpu上训练,用了torch-cpu,检查torch版本。
- 如果版本没问题,注释掉:
model = model.cuda()
干货|使用PyTorch从零开始构建Elman循环神经网络
!
摘要: 循环神经网络是如何工作的?如何构建一个Elman循环神经网络?在这里,教你手把手创建一个Elman循环神经网络进行简单的序列预测。
本文以最简单的RNNs模型为例:Elman循环神经网络,讲述循环神经网络的工作原理,即便是你没有太多循环神经网络(RNNs)的基础知识,也可以很容易的理解。为了让你更好的理解RNNs,我们使用Pytorch张量包和autograd库从头开始构建Elman循环神经网络。该文中完整代码在Github上是可实现的。
在这里,假设你对前馈神经网络略有了解。Pytorch和autograd库更为详细的内容请查看我的其他教程。
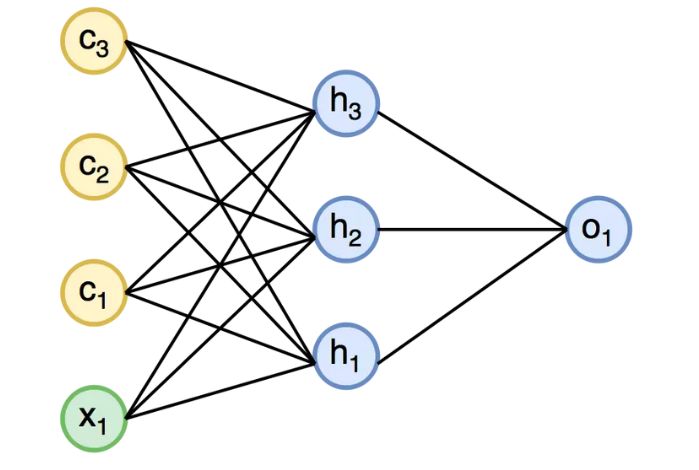
Elman循环神经网络
Jeff Elman首次提出了Elman循环神经网络,并发表在论文《Finding structure in time》中:它只是一个三层前馈神经网络,输入层由一个输入神经元x1和一组上下文神经元单元{c1 ... cn}组成。隐藏层前一时间步的神经元作为上下文神经元的输入,在隐藏层中每个神经元都有一个上下文神经元。由于前一时间步的状态作为输入的一部分,因此我们可以说,Elman循环神经网络拥有一定的内存——上下文神经元代表一个内存。
预测正弦波
现在,我们来训练RNNs学习正弦函数。在训练过程中,一次只为模型提供一个数据,这就是为什么我们只需要一个输入神经元x1,并且我们希望在下一时间步预测该值。输入序列x由20个数据组成,并且目标序列与输入序列相同。
模型实现
首先导入包。

接下来,设置模型的超参数。设置输入层的大小为7(6个上下文神经元和1个输入神经元),seq_length用来定义输入和目标序列的长度。

生成训练数据:x是输入序列,y是目标序列。

创建两个权重矩阵。大小为(input_size,hidden_size)的矩阵w1用于隐藏连接的输入,大小为(hidden_size,output_size)的矩阵w2用于隐藏连接的输出。 用零均值的正态分布对权重矩阵进行初始化。

定义forward方法,其参数为input向量、context_state向量和两个权重矩阵,连接input和context_state创建xh向量。对xh向量和权重矩阵w1执行点积运算,然后用tanh函数作为非线性函数,在RNNs中tanh比sigmoid效果要好。 然后对新的context_state和权重矩阵w2再次执行点积运算。 我们想要预测连续值,因此这个阶段不使用任何非线性。
请注意,context_state向量将在下一时间步填充上下文神经元。 这就是为什么我们要返回context_state向量和out。

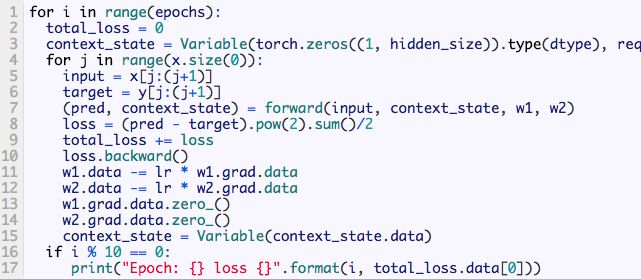
训练
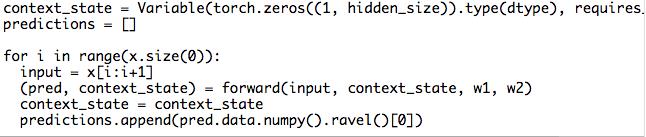
训练循环的结构如下:
1.外循环遍历每个epoch。epoch被定义为所有的训练数据全部通过训练网络一次。在每个epoch开始时,将context_state向量初始化为0。
2.内部循环遍历序列中的每个元素。执行forward方法进行正向传递,该方法返回pred和context_state,将用于下一个时间步。然后计算均方误差(MSE)用于预测连续值。执行backward()方法计算梯度,然后更新权重w1和w2。每次迭代中调用zero_()方法清除梯度,否则梯度将会累计起来。最后将context_state向量包装放到新变量中,以将其与历史值分离开来。
训练期间产生的输出显示了每个epoch的损失是如何减少的,这是一个好的衡量方式。损失的逐渐减少则意味着我们的模型正在学习。

预测
一旦模型训练完毕,我们就可以进行预测。在序列的每一步我们只为模型提供一个数据,并要求模型在下一个步预测一个值。
预测结果如下图所示:黄色圆点表示预测值,蓝色圆点表示实际值,二者基本吻合,因此模型的预测效果非常好。
结论
在这里,我们使用了Pytorch从零开始构建一个基本的RNNs模型,并且学习了如何将RNNs应用于简单的序列预测问题。
原文:https://www.cpuheater.com/deep-learning/introduction-to-recurrent-neural-networks-in-pytorch/?spm=a2c4e.11153959.blogcont573311.12.75d2668ccjJf5x
-马上学习AI挑战百万年薪-
点击“阅读原文”,查看详情
以上是关于pytorch从零开始用语义分割网络(deeplab3+)训练自己的数据集的主要内容,如果未能解决你的问题,请参考以下文章