opencv1
Posted 月屯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv1相关的知识,希望对你有一定的参考价值。
环境
装opencv
pip install opencv-python==3.4.1.15
pip install opencv-contrib-python==3.4.1.15 -i https://pypi.douban.com/simple/
图像基本操作
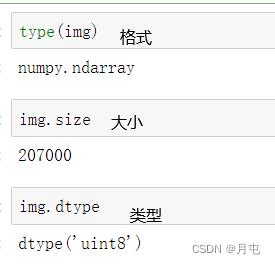
数据读取-图像
cv2.IMREAD_COLOR:彩色图像
cv2.IMREAD_GRAYSCALE:灰度图像
import cv2 #opencv读取的格式是BGR
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
img=cv2.imread('cat.jpg')
#图像的显示,也可以创建多个窗口
cv2.imshow('image',img)
# 等待时间,毫秒级,0表示任意键终止
cv2.waitKey(0)
cv2.destroyAllWindows()
# 数值类型
print(img.shape)
灰色读取与图像保存
import cv2 #opencv读取的格式是BGR
import matplotlib.pyplot as plt
import numpy as np
img=cv2.imread('../image/2009.png',cv2.IMREAD_GRAYSCALE)
#图像的显示,也可以创建多个窗口
cv2.imshow('image',img)
# 等待时间,毫秒级,0表示任意键终止
cv2.waitKey(0)
cv2.destroyAllWindows()
print(img.shape)
#保存
cv2.imwrite('mycat.png',img)

局部截取
import cv2 #opencv读取的格式是BGR
import matplotlib.pyplot as plt
import numpy as np
img=cv2.imread('../image/2009.png')
cat=img[0:50,0:200]
cv2.imshow('cat',cat)
# 等待时间,毫秒级,0表示任意键终止
cv2.waitKey(0)
cv2.destroyAllWindows()
print(img.shape)
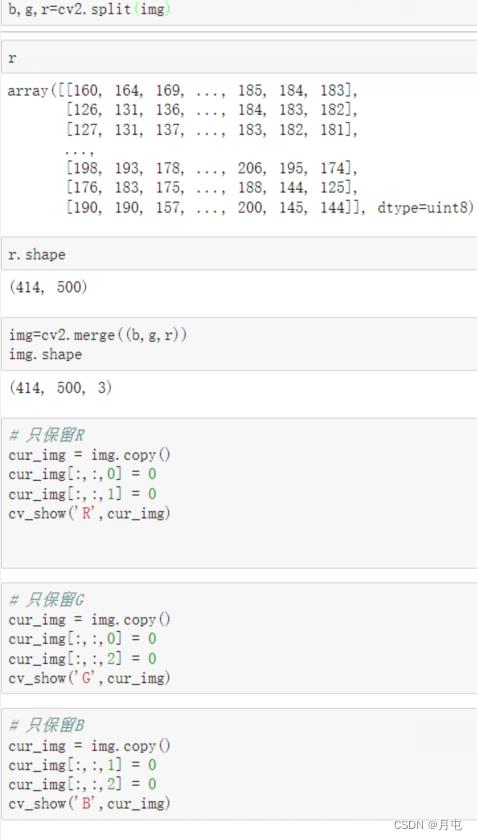
颜色通道提取
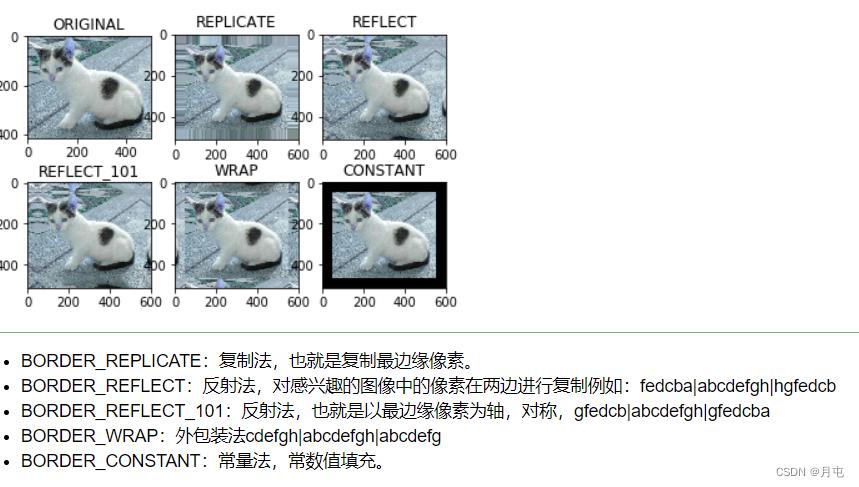
边界填充
top_size,bottom_size,left_size,right_size = (50,50,50,50)
replicate = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, borderType=cv2.BORDER_REPLICATE)
reflect = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size,cv2.BORDER_REFLECT)
reflect101 = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT_101)
wrap = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_WRAP)
constant = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size,cv2.BORDER_CONSTANT, value=0)
import matplotlib.pyplot as plt
plt.subplot(231), plt.imshow(img, 'gray'), plt.title('ORIGINAL')
plt.subplot(232), plt.imshow(replicate, 'gray'), plt.title('REPLICATE')
plt.subplot(233), plt.imshow(reflect, 'gray'), plt.title('REFLECT')
plt.subplot(234), plt.imshow(reflect101, 'gray'), plt.title('REFLECT_101')
plt.subplot(235), plt.imshow(wrap, 'gray'), plt.title('WRAP')
plt.subplot(236), plt.imshow(constant, 'gray'), plt.title('CONSTANT')
plt.show()
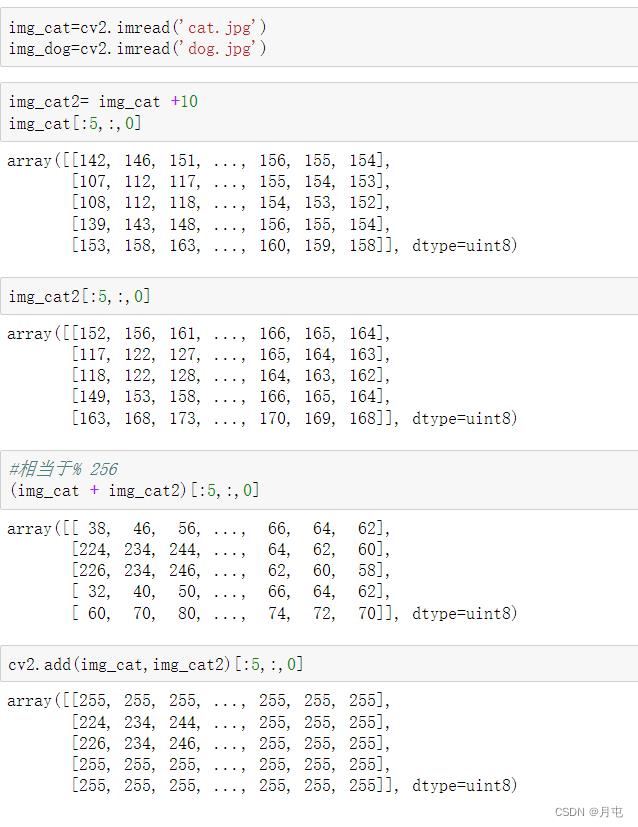
数值计算
图像融合
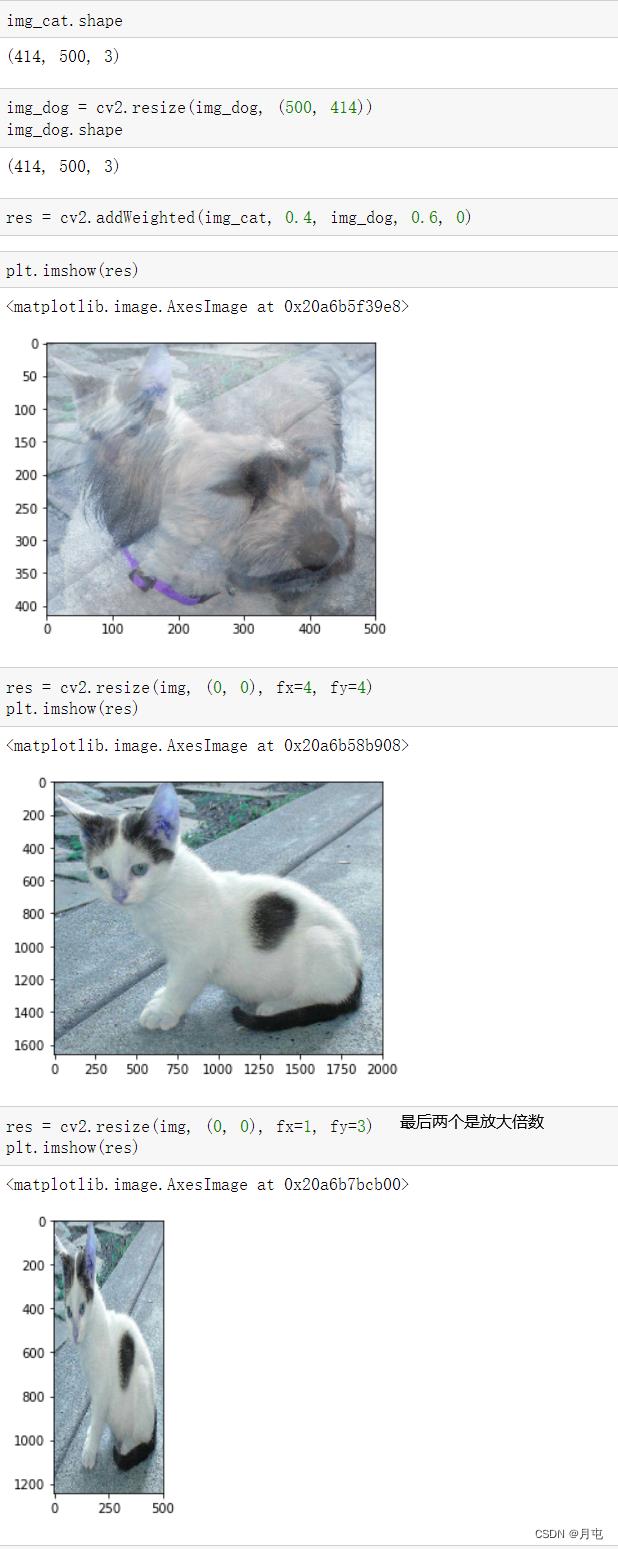
数据读取-视频
cv2.VideoCapture可以捕获摄像头,用数字来控制不同的设备,例如0,1。如果是视频文件,直接指定好路径即可
import cv2 #opencv读取的格式是BGR
import matplotlib.pyplot as plt
import numpy as np
vc = cv2.VideoCapture('../image/test.mp4')
# 检查是否打开正确
if vc.isOpened():
# open是否可读,frame帧
open, frame = vc.read()
else:
open = False
while open:
ret, frame = vc.read()
if frame is None:
break
if ret == True:
# 灰色读取
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
cv2.imshow('result', gray)
# oxff esc退出键
if cv2.waitKey(100) & 0xFF == 27:
break
vc.release()
cv2.destroyAllWindows()
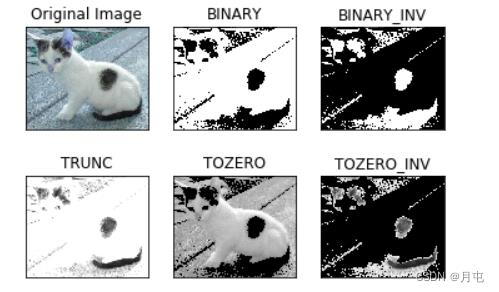
阈值(突出)
# 前面阈值后面图像
ret, dst = cv2.threshold(src, thresh, maxval, type)
src: 输入图,只能输入单通道图像,通常来说为灰度图
dst: 输出图
thresh: 阈值
maxval: 当像素值超过了阈值(或者小于阈值,根据type来决定),所赋予的值
type:二值化操作的类型,包含以下5种类型: cv2.THRESH_BINARY; cv2.THRESH_BINARY_INV; cv2.THRESH_TRUNC; cv2.THRESH_TOZERO;cv2.THRESH_TOZERO_INV
cv2.THRESH_BINARY 超过阈值部分取maxval(最大值),否则取0
cv2.THRESH_BINARY_INV THRESH_BINARY的反转
cv2.THRESH_TRUNC 大于阈值部分设为阈值,否则不变
cv2.THRESH_TOZERO 大于阈值部分不改变,否则设为0
cv2.THRESH_TOZERO_INV THRESH_TOZERO的反转
ret, thresh1 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY)
ret, thresh2 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_BINARY_INV)
ret, thresh3 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TRUNC)
ret, thresh4 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO)
ret, thresh5 = cv2.threshold(img_gray, 127, 255, cv2.THRESH_TOZERO_INV)
titles = ['Original Image', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV']
images = [img, thresh1, thresh2, thresh3, thresh4, thresh5]
for i in range(6):
plt.subplot(2, 3, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()
图像平滑处理(与后面两者功能去噪点)
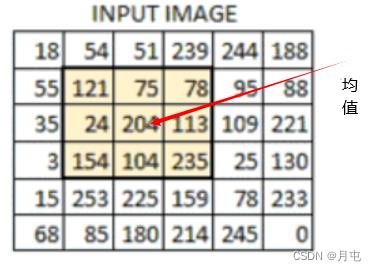
# 均值滤波
# 简单的平均卷积操作
blur = cv2.blur(img, (3, 3))
cv2.imshow('blur', blur)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 方框滤波
# 基本和均值一样,可以选择归一化,normalize false最后结果是3*3的总值
box = cv2.boxFilter(img,-1,(3,3), normalize=True)
cv2.imshow('box', box)
cv2.waitKey(0)
cv2.destroyAllWindows()
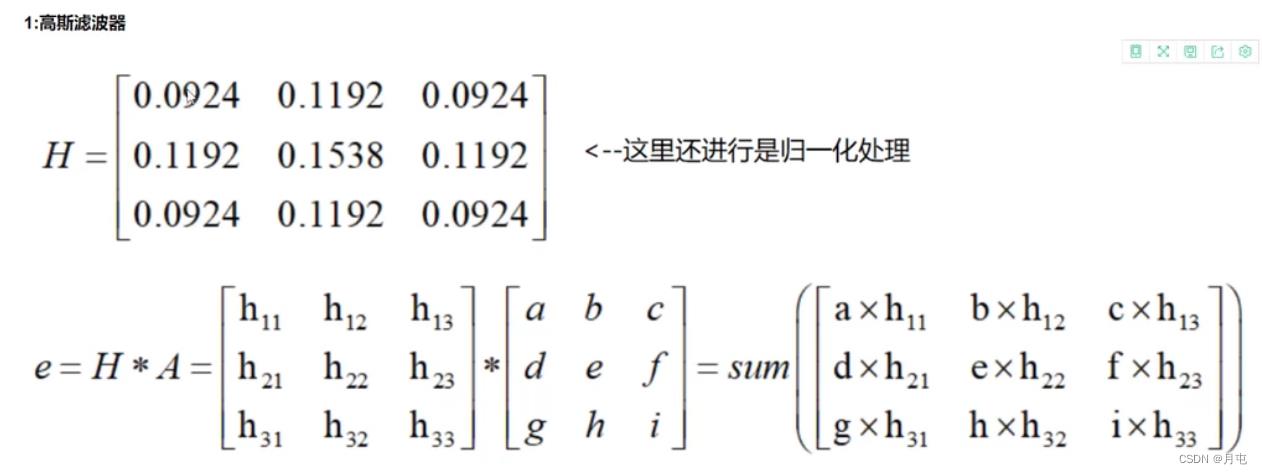
高斯滤波
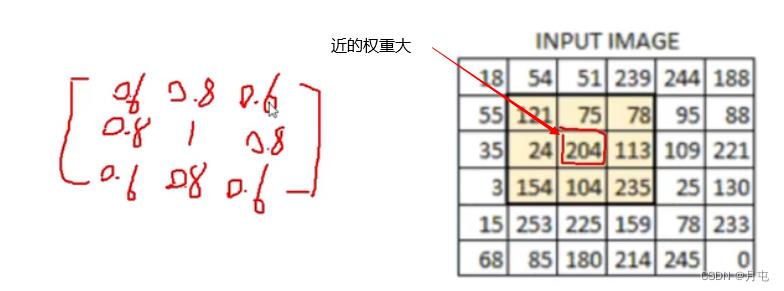
# 高斯滤波
# 高斯模糊的卷积核里的数值是满足高斯分布,相当于更重视中间的
aussian = cv2.GaussianBlur(img, (5, 5), 1)
cv2.imshow('aussian', aussian)
cv2.waitKey(0)
cv2.destroyAllWindows()
中值滤波
# 中值滤波
# 相当于用中值代替
median = cv2.medianBlur(img, 5) # 中值滤波
cv2.imshow('median', median)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果小结
import numpy as np
# 展示所有的
res = np.hstack((blur,aussian,median))
#print (res)
cv2.imshow('median vs average', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
腐蚀操作、 膨胀操作
kernel = np.ones((3,3),np.uint8)
# kernel每次腐蚀的框大小,iterations迭代次数
erosion = cv2.erode(img,kernel,iterations = 1)
cv2.imshow('erosion', erosion)
cv2.waitKey(0)
cv2.destroyAllWindows()
kernel = np.ones((3,3),np.uint8)
dige_erosion = cv2.erode(img,kernel,iterations = 1)
cv2.imshow('erosion', erosion)
cv2.waitKey(0)
cv2.destroyAllWindows()
开运算与闭运算
# 开:先腐蚀,再膨胀
img = cv2.imread('dige.png')
kernel = np.ones((5,5),np.uint8)
opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)
cv2.imshow('opening', opening)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 闭:先膨胀,再腐蚀
img = cv2.imread('dige.png')
kernel = np.ones((5,5),np.uint8)
closing = cv2.morphologyEx(img, cv2.MORPH_CLOSE, kernel)
cv2.imshow('closing', closing)
cv2.waitKey(0)
cv2.destroyAllWindows()
梯度运算
# 梯度=膨胀-腐蚀
pie = cv2.imread('pie.png')
kernel = np.ones((7,7),np.uint8)
dilate = cv2.dilate(pie,kernel,iterations = 5)
erosion = cv2.erode(pie,kernel,iterations = 5)
res = np.hstack((dilate,erosion))
cv2.imshow('res', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
gradient = cv2.morphologyEx(pie, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('gradient', gradient)
cv2.waitKey(0)
cv2.destroyAllWindows()
礼帽与黑帽
礼帽 = 原始输入-开运算结果(刺头)
黑帽 = 闭运算-原始输入(轮廓)
kernel = np.ones((5,5),np.uint8)
#礼帽
img = cv2.imread('dige.png')
tophat = cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
cv2.imshow('tophat', tophat)
cv2.waitKey(0)
cv2.destroyAllWindows()
#黑帽
img = cv2.imread('dige.png')
blackhat = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT, kernel)
cv2.imshow('blackhat ', blackhat )
cv2.waitKey(0)
cv2.destroyAllWindows()
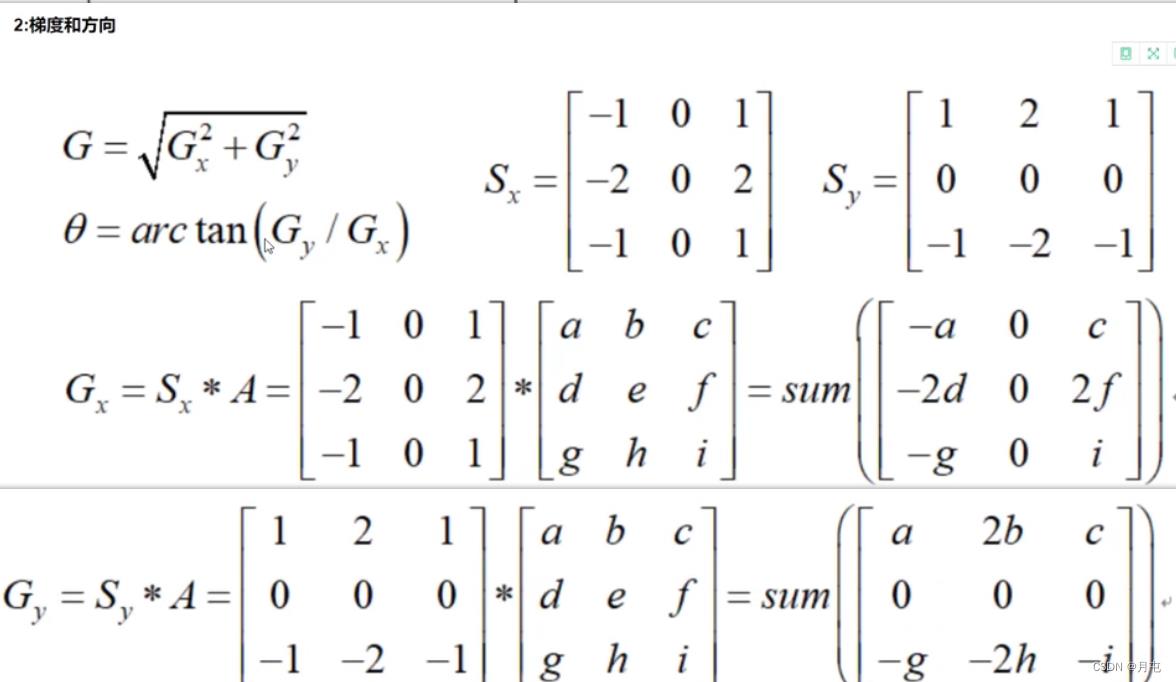
图像梯度-Sobel算子(轮廓)
dst = cv2.Sobel(src, ddepth, dx, dy, ksize)
ddepth:图像的深度,一般买默认-1
dx和dy分别表示水平和竖直方向
ksize是Sobel算子的大小

x方向
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
# (参数2)统一负数操作
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
cv_show(sobelx,'sobelx')
# 白到黑是正数,黑到白就是负数了,所有的负数会被截断成0,所以要取绝对值
sobelx = cv2.convertScaleAbs(sobelx)
cv_show(sobelx,'sobelx')
y方向
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobely = cv2.convertScaleAbs(sobely)
cv_show(sobely,'sobely')
分别计算x和y,再求和
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
cv_show(sobelxy,'sobelxy')

不建议直接计算
sobelxy=cv2.Sobel(img,cv2.CV_64F,1,1,ksize=3)
sobelxy = cv2.convertScaleAbs(sobelxy)
cv_show(sobelxy,'sobelxy')
图像梯度-Scharr算子、图像梯度-laplacian算子(噪音点明显)

def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
import numpy as np
#不同算子的差异
img = cv2.imread('lena.jpg',cv2.IMREAD_GRAYSCALE)
sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=3)
sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=3)
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
sobelxy = cv2.addWeighted(sobelx,0.5,sobely,0.5,0)
scharrx = cv2.Scharr(img,cv2.CV_64F,1,0)
scharry = cv2.Scharr(img,cv2.CV_64F,0,1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx,0.5,scharry,0.5,0)
laplacian = cv2.Laplacian(img,cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)
res = np.hstack((sobelxy,scharrxy,laplacian))
cv_show(res,'res')

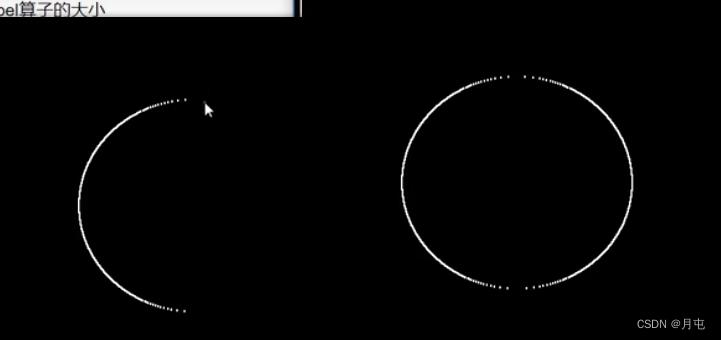
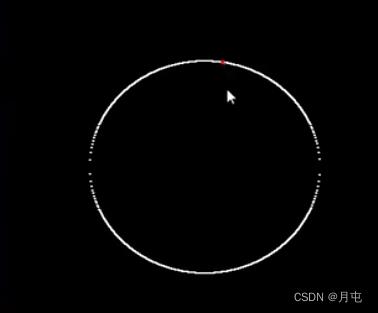
Canny边缘检测
- 使用高斯滤波器,以平滑图像,滤除噪声。
- 计算图像中每个像素点的梯度强度和方向。
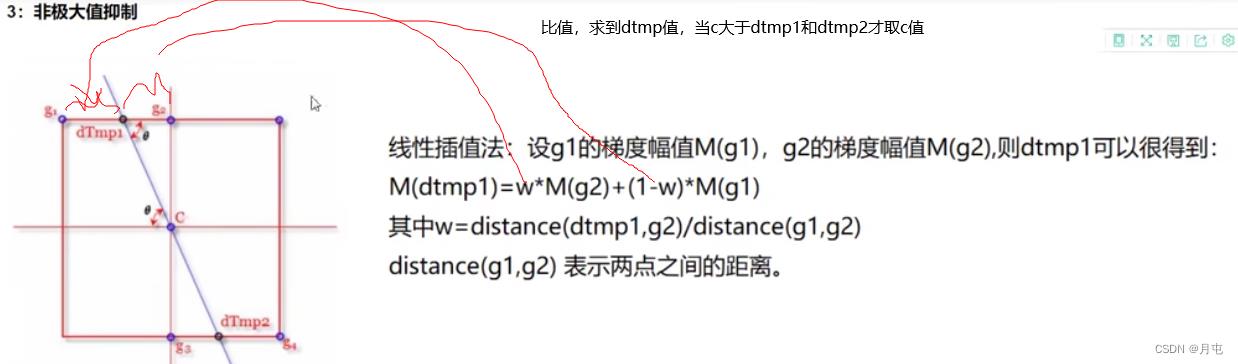
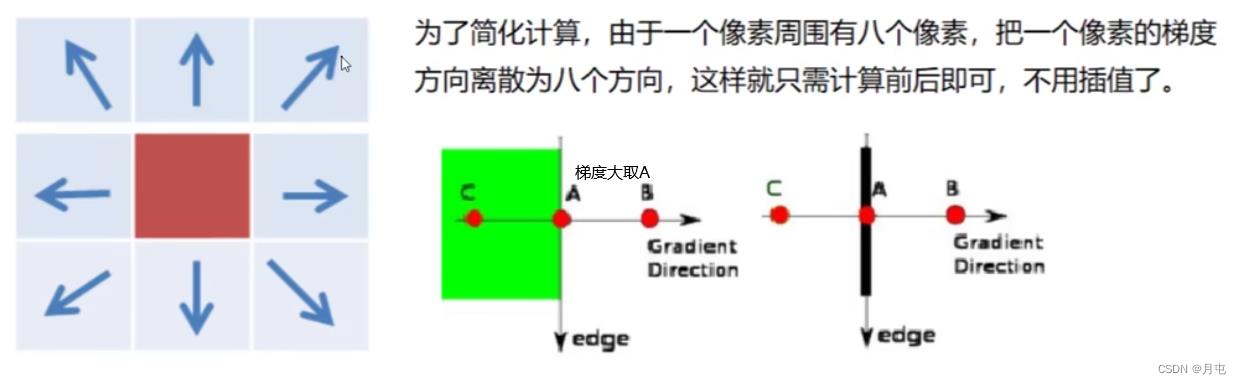
- 应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。(非极大值去除)
- 应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
- 通过抑制孤立的弱边缘最终完成边缘检测。

img=cv2.imread("lena.jpg",cv2.IMREAD_GRAYSCALE)
# 双阈值最大最小
v1=cv2.Canny(img,80,150)
v2=cv2.Canny(img,50,100)
res = np.hstack((v1,v2))
cv_show(res,'res')

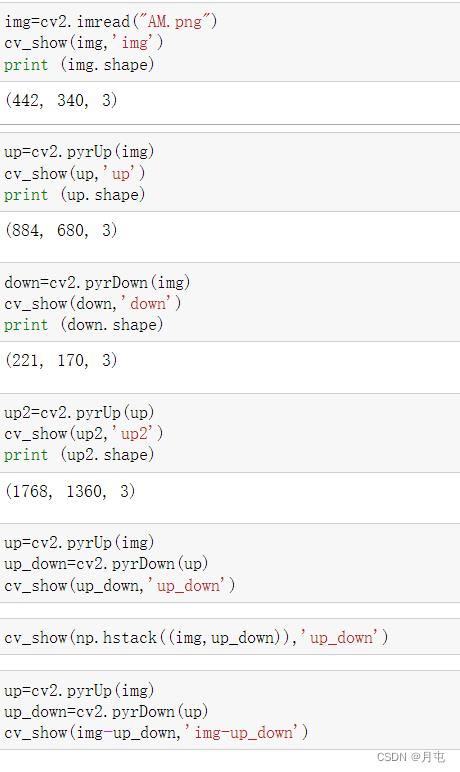
图像金字塔
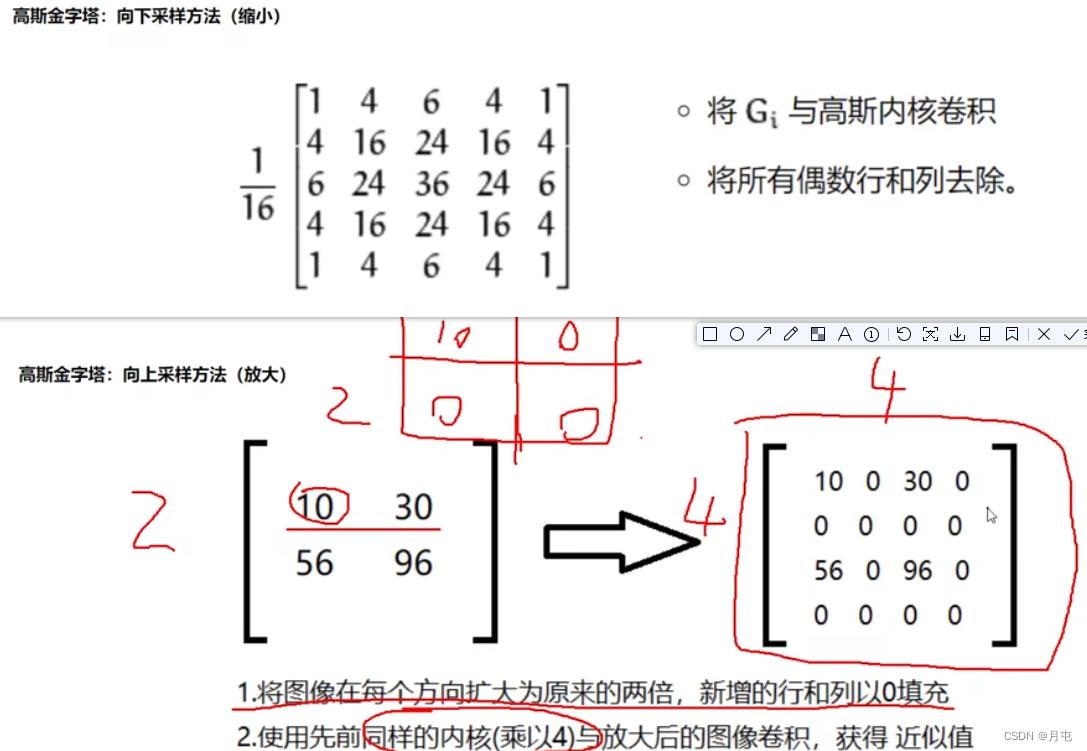
高斯金字塔
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey()
cv2.destroyAllWindows()
拉普拉斯金字塔
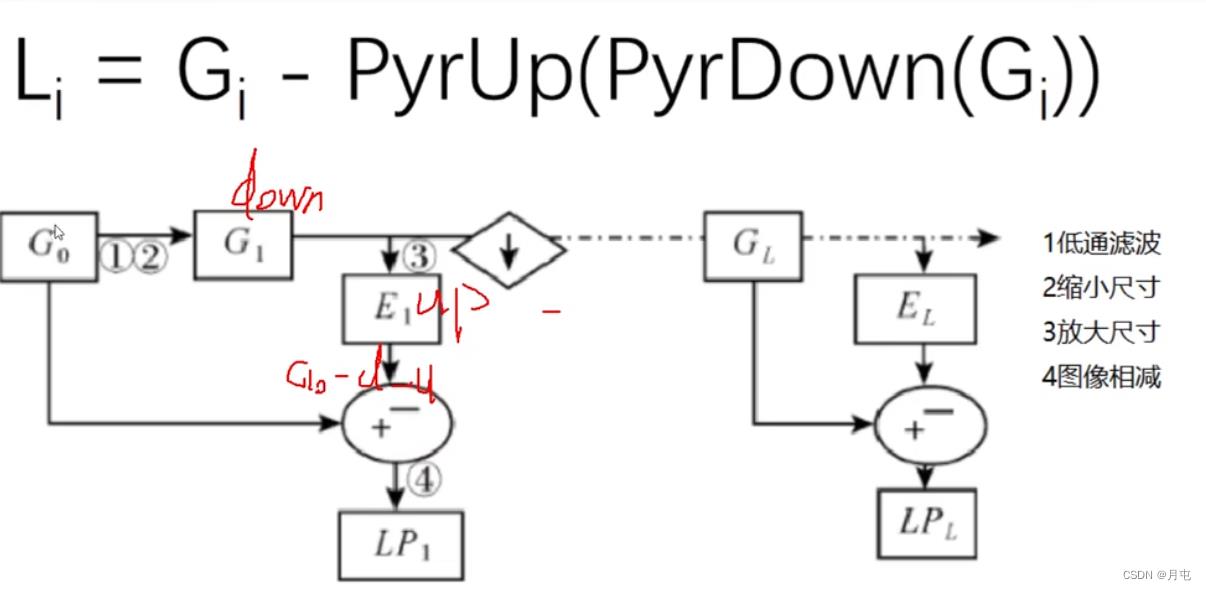
down=cv2.pyrDown(img)
down_up=cv2.pyrUp(down)
l_1=img-down_up
cv_show(l_1,'l_1')

图像轮廓
cv2.findContours(img,mode,method)
mode:轮廓检索模式
RETR_EXTERNAL :只检索最外面的轮廓;
RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;(常用)
method:轮廓逼近方法
CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。(精简)
为了更高的准确率,使用二值图像。
img = cv2.imread('contours.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 二值处理
ret, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
cv_show(thresh,'thresh')

# binary二值处理 contours轮廓点 hierarchy结果信息
binary, contours, hierarchy = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE)
#传入绘制图像,轮廓,轮廓索引,颜色模式,线条厚度
# 注意需要copy,要不原图会变。。。
draw_img = img.copy()
# -1第几个轮廓,-1全部;(0, 0, 255)轮廓线条颜色; 2线条宽度
res = cv2.drawContours(draw_img, contours, -1, (0, 0, 255), 2)
cv_show以上是关于opencv1的主要内容,如果未能解决你的问题,请参考以下文章