模型部署Jetson Xavier NX(eMMC)部署YOLOv5-5.0
Posted 嗜睡的篠龙
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了模型部署Jetson Xavier NX(eMMC)部署YOLOv5-5.0相关的知识,希望对你有一定的参考价值。
文章目录
前言
本文对在Jetson Xavier NX上部署YOLOv5-5.0的过程进行全面梳理和总结。
NX介绍
在此之前,首先要了解一下Jetson Xavier NX(以下简称NX)。NX是NVIDIA2020年发布的一款应用于边缘AI的超级计算机,NANO 般的大小,却可以在 10 W功率下可提供 14 TOPS,而在 15 W功率下可提供 21 TOPS,非常适合在大小和功率方面受限的系统。凭借 384 个 CUDA 核心、48 个 Tensor Core 和 2 个 NVDLA 引擎,它可以并行运行多个现代神经网络,并同时处理来自多个传感器的高分辨率数据。借助 NX,我们可以使用完整的 NVIDIA 软件堆栈,通过加速库来运行现代 AI 网络和框架,从而实现深度学习以及计算机视觉、计算机图形、多媒体等。
那么NX长什么样呢?没错,就长下面这模样:
 图1 Jetson Xavier NX 图1 Jetson Xavier NX
|
 图2 Jetson Xavier NX开发者套件 图2 Jetson Xavier NX开发者套件
|
其中图1是官方原装NX,一块只有sodimm接口的板子,没有风扇,USB、网口等接口,图2为开发者套件,提供各种外设接口。NX具体的硬件模块如下所示:
 图3 NX正面模块解析 图3 NX正面模块解析
|
 图4 NX背面模块解析 图4 NX背面模块解析
|
版本区别(SD | eMMC)
目前NX有两个版本:SD卡槽的版本,和带eMMC存储芯片的版本:
- 带SD卡槽的版本可以使用microSD卡烧录系统后直接插入使用,也支持通过虚拟机SDKManager软件刷入系统使用
- 带eMMC存储芯片的版本,容量为16G,不支持microSD卡烧录系统方式,支持虚拟机SDKManager软件刷入系统使用
两个版本除了储蓄方式不同,其他性能相同,烧录好系统后使用差异不大
规格参数
NX的规格参数如下所示:

关键参数:
- NX是arm64架构的,和x86有根本性不同,导致很多东西不能适配,所以在部署的时候必须根据实际情况来
- 4个USB接口(真香~)
- 摄像头支持CSI-2接口,但也可以用USB摄像头(后续会有实践)
Jetpack4.6.1环境搭建
现在开搞!!准备以下装备:
- 带USB接口的键盘
- 带USB接口的鼠标
- 1条母对母杜邦线
- 用于连接NX上的FC REC和GND引脚,使NX进入恢复模式
- USB-a对USB-b数据线
- 用于连接NX和自己的电脑
- 带HDMI接口的显示器
- 电源线
烧录系统(OS)
以下操作均在自己的电脑上,但必须要有Linux系统,可以是双系统,也可以是虚拟机,以下是本文环境:
- Jetson Xavier NX(developer kit version)
- VMware 16
- Ubuntu18.04
- Jetpack4.6.1
1、SDKmanager安装
直接浏览器搜索:SDKmanager,进入官网,首先进行注册(邮箱+密码即可),之后下载.deb格式文件,会自动下载到Downloads文件夹下:
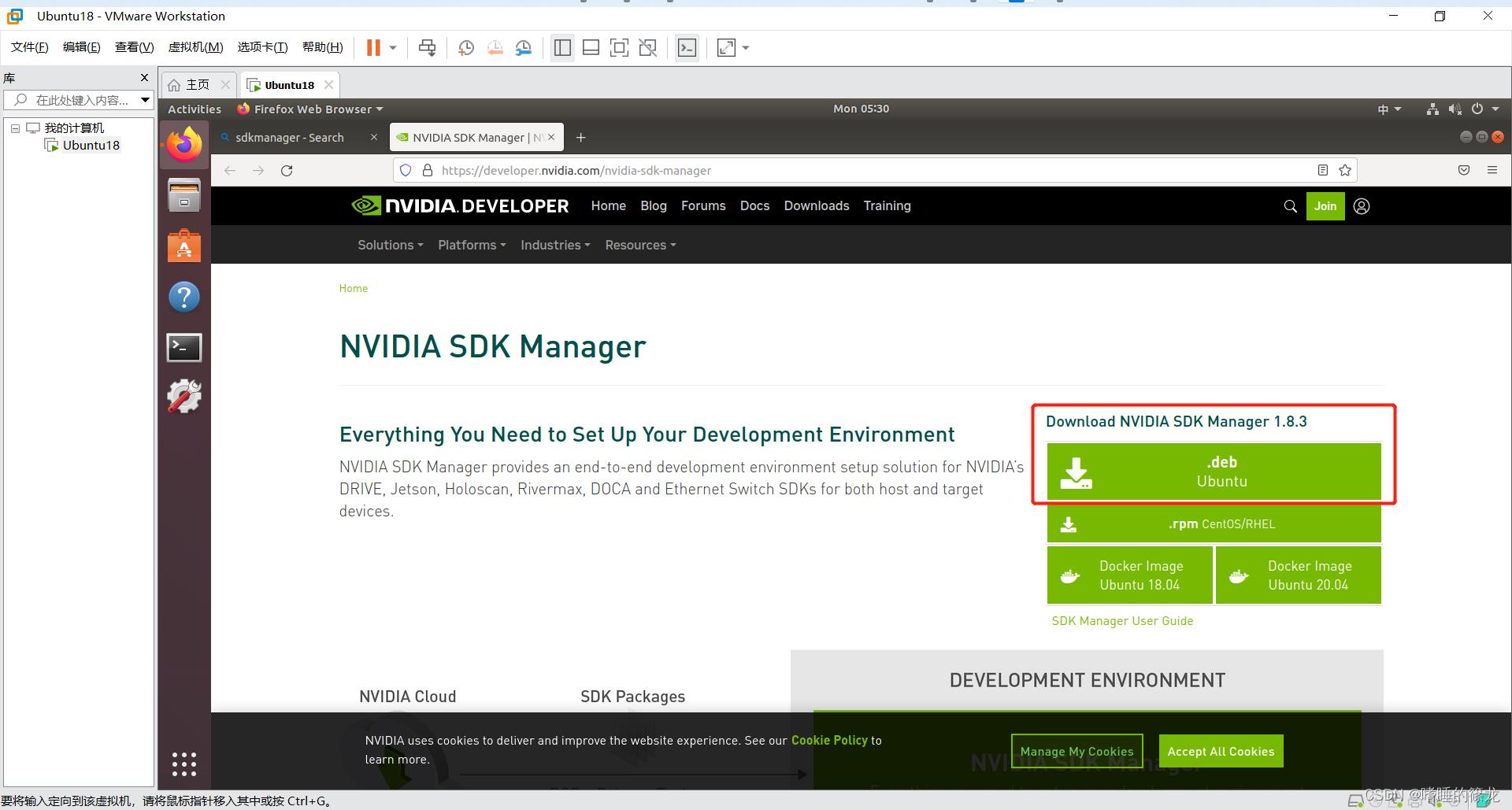
接着打开Terminal,cd到Downloads,ls查看是否已下载,最后sudo apt install ./sdkmanager_1.8.3-10409_amd64.deb进行安装:
xl@ubuntu:~$ cd Downloads/
xl@ubuntu:~/Downloads$ ls
nvidia sdkmanager_1.8.3-10409_amd64.deb
xl@ubuntu:~/Downloads$ sudo apt install ./sdkmanager_1.8.3-10409_amd64.deb
之后在Terminal中输入sdkmanager命令,打开应用窗口(第一次打开会进行login in步骤,就是登录之前注册NVIDIA账号和密码):

2、连接NX和自己电脑
现在开始连接我们的装备,按照下图所示进行连接:

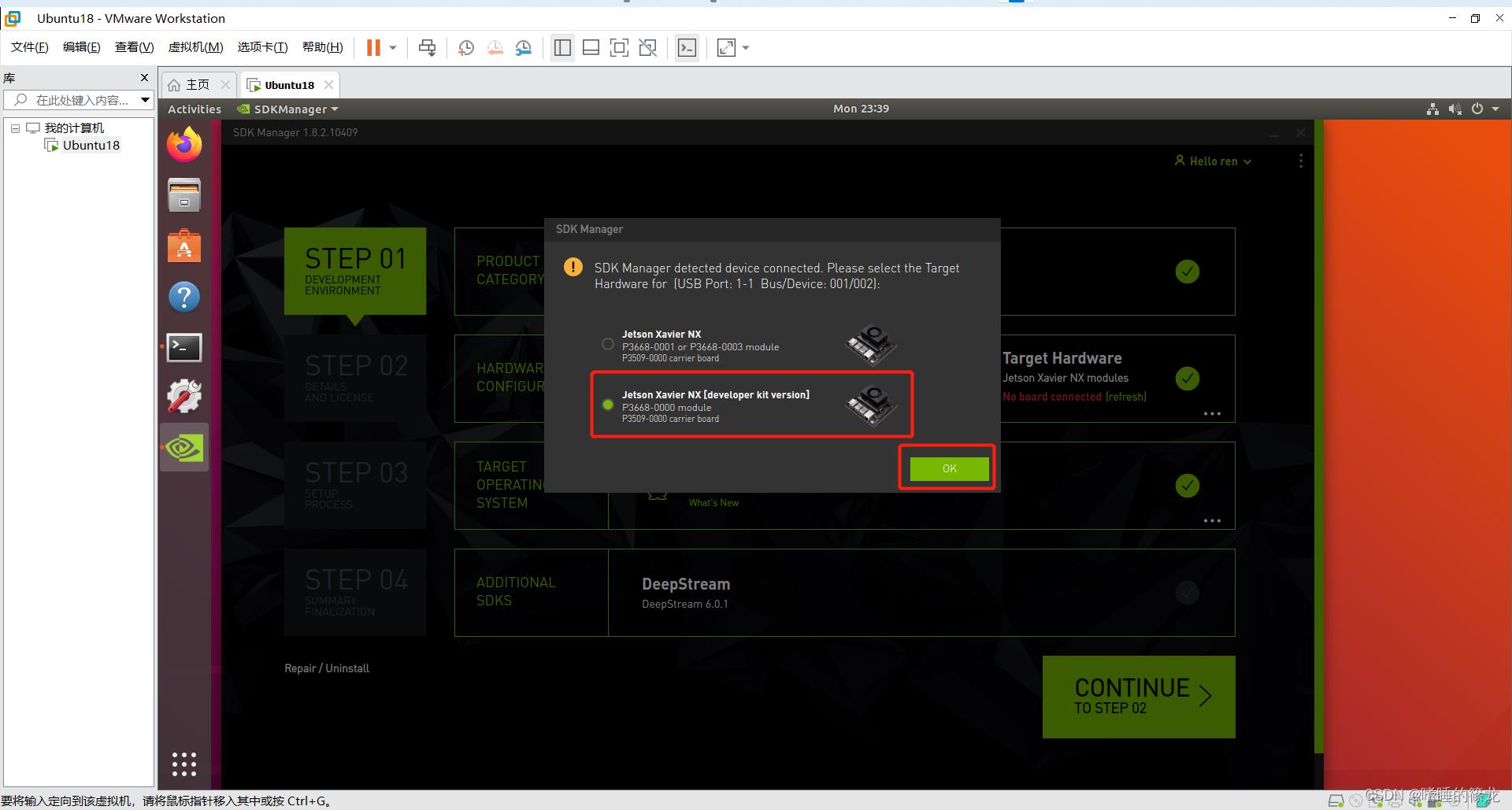
连接顺序没有强制要求,建议最后连接USB-b(即插入电脑),连接好后电脑会自动检查显示以下信息,我们选择连接到虚拟机中的Ubuntu18系统,确定即可

之后虚拟机就会自动显示NX版本信息,我们选择第二个开发套件版本,OK即可
3、STEP01
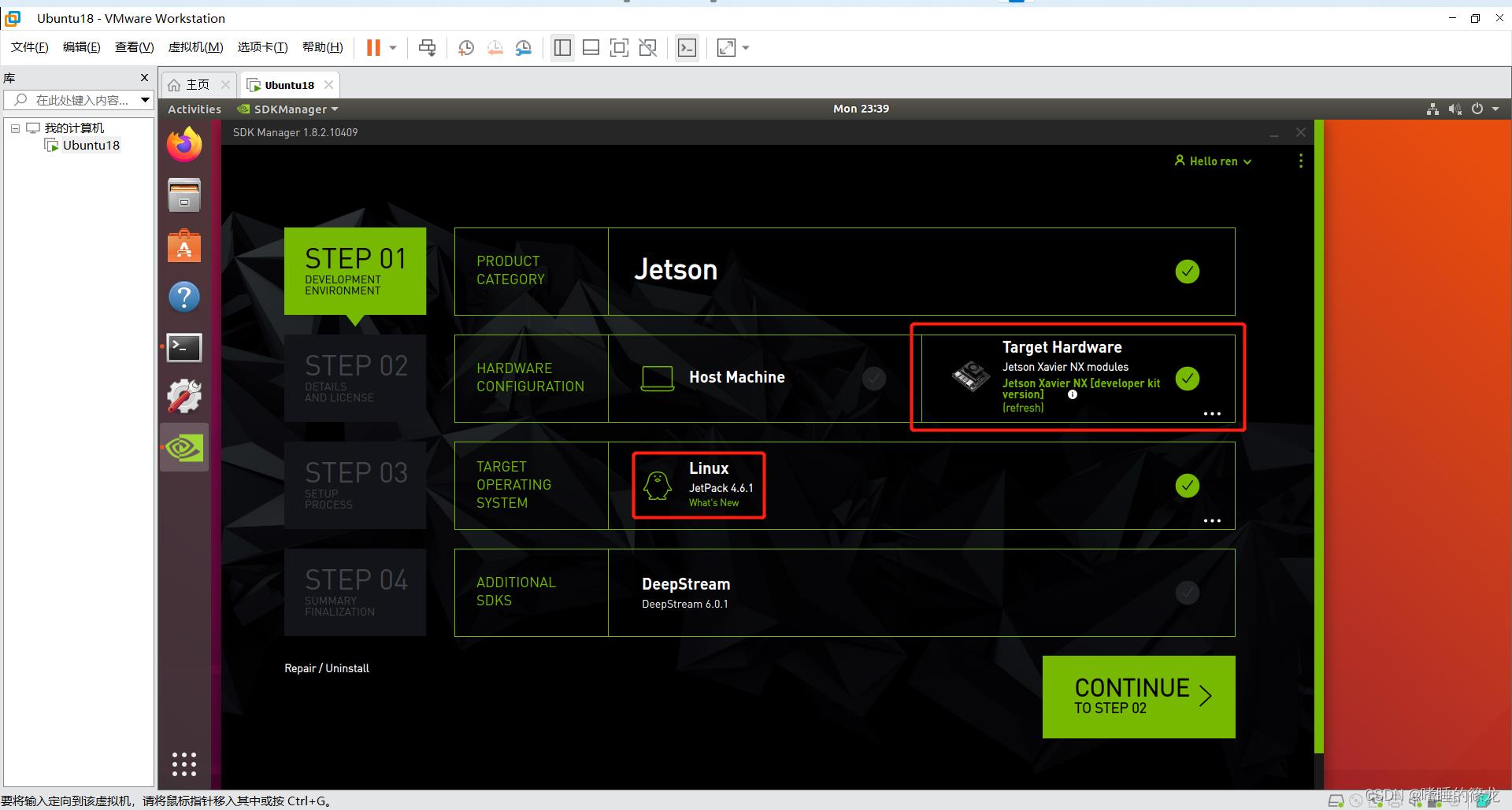
之后就正式开始使用SDKManager烧录系统啦~~!!选择如下:
- 取消选择
Host Machine - 选择
Jetpack 4.6.1 - 取消选择
DeepStream
点击CONTINUE
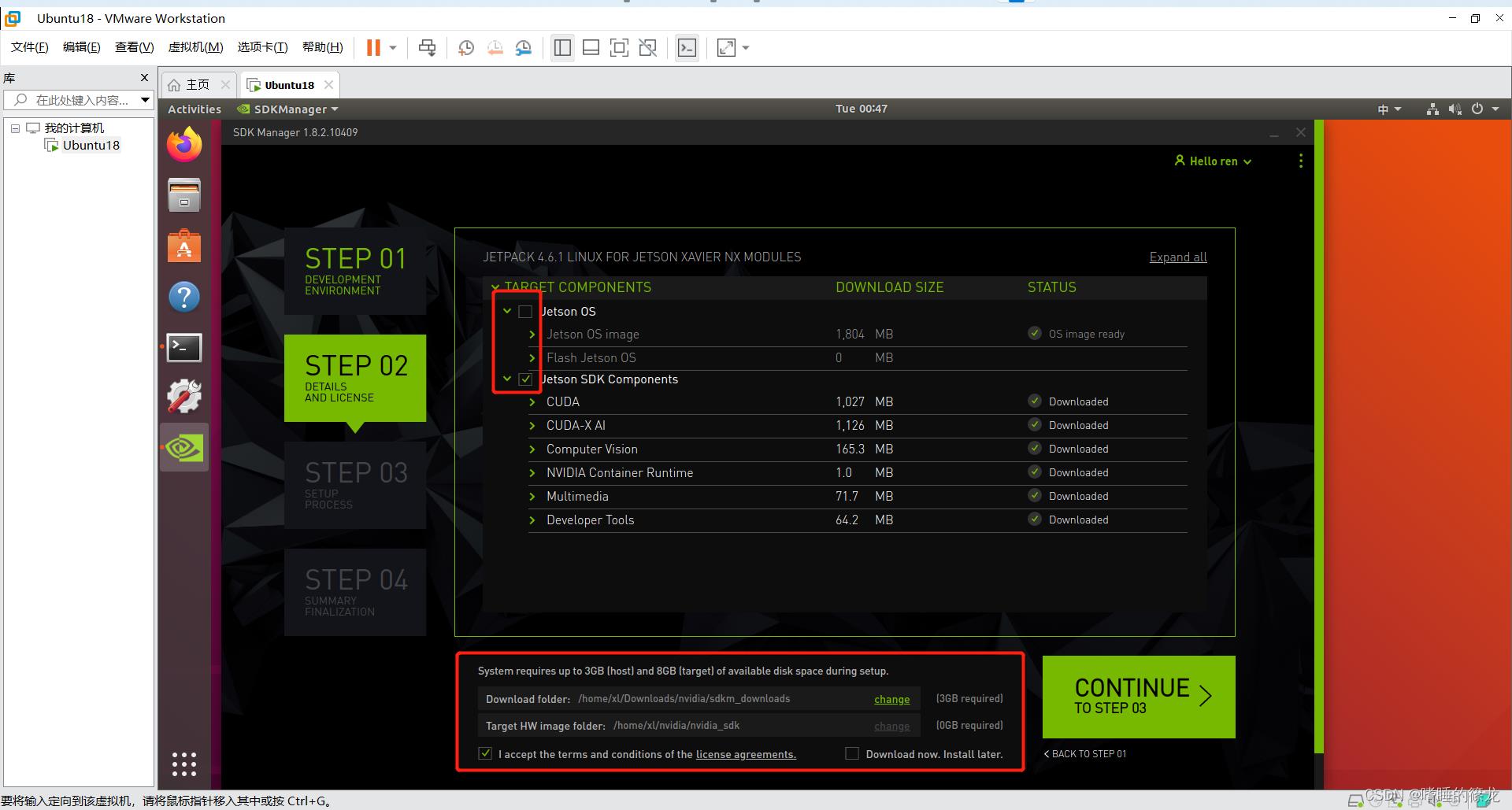
4、STEP02
这里只选择烧录OS系统,取消选择烧录SDK组件(容量只有可怜的16G,等后面装上SSD固态硬盘再装也不迟!!)
左下角是选择下载空间,SDKManager会将相关文件下载到虚拟机中之后,再转移到NX上去。这里就是存下载文件的地方,选择完下载路径之后,点击左下角的我接受,点击CONTINUE

5、STEP03
之后就开始下载和安装啦(下面两个进度条,第一个是下载相关文件到虚拟机的进度,第二个是安装相关文件到NX上的进度),要注意,当Installing进行到50%的时候,会弹窗让我们进行一些设置:
- 如果是第一次烧录,就是用自动模式(Automatic),它会创建一个暂时的局域网连接,地址为192.168.55.1,然后输入新的用户名和密码
- 如果不是第一次,就选择手动模式(Manual),需要自己先去盒子上查询当前的IP地址

最后0.5%会异常缓慢,成功之后,点击FINISH退出即可
6、STEP04
恭喜你!!到这一步就烧录成功啦!!!
SSD启动
烧录完成之后,拔掉杜邦线,USB-ab线,给板子接上鼠标,键盘,显示器,然后开搞!!
NX使用SSD的读取速度是SD卡的7倍,因此从SSD启动不仅会对NX进行扩容,还会大幅度提高NX的性能,何乐而不为呢~~
SSD分区
首先,我们要有一个SSD,然后把它插到NX上:

然后,将NX接通电源,登录账号,搜索disk,打开Disks

可以看到NX已经显示SSD信息了,点击右上角选择Format Disk,进行格式化

点击Format

完事之后可以看到SSD全部变成了Free Space了
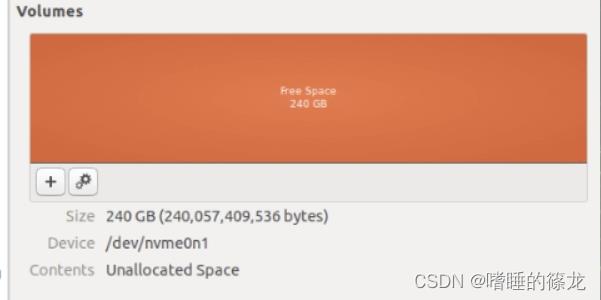
接着点击加号+,进行空间分配,可以给Free Space16G,剩下全给我们的NX,点击Next

给新的卷命名,然后Create

创建成功!!!

设置为启动项
接下来要进行安装,直接运行NX开源的脚本即可:
- 复制rootOnNVMe项目
- 将根源文件复制到自己的SSD
- 启用从 SSD 启动运行
- 重启以使服务生效
git clone https://github.com/jetsonhacks/rootOnNVMe.git
cd rootOnNVMe
./copy-rootfs-ssd.sh
./setup-service.sh
sudo reboot
深度学习环境搭建
至此,我们的NX基本环境搭建和SSD启动已经完成。下面,进行深度学习相关环境安装,以便于我们快乐的使用NX~~hhhh
设置语言/地区等信息
如果直接从SDKManager中烧录cuda,cudnn等组件,会出现以下报错:
Cannot contact to the device via SSH, validate that SSH service is running on the device
解决方式:在NX上设置完地区(上海)、语言、键盘等信息后,重启解决
烧录SDK组件
与烧录OS系统类似,不同的是,这里不用插杜邦线哦!!Jetpack4.6.1配套的组件版本信息如下:
- CUDA:10.2.300
- cuDNN:8.2.1.32
- TensorRT:8.2.1.8
- OpenCV:4.11
连接好接线后,打开SDKManager,在STEP02中,只选择第二项Jetpack SDK Components,点击CONTINUE
之后会让我们输入虚拟机的密码,然后检查安装环境是否正确,之后就正式开始下载和安装了,在这个过程中,会让我们输入NX的账号密码,最后我们点击Install即可

换清华源(可选)
- 重新编辑
source.list文件
sudo vim /etc/apt/sources.list
- 更换清华源
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main universe restricted
- 更新源
sudo apt-get update
YOLOv5-5.0
现在,我们要在NX上安装YOLOv5-5.0算法库,首先安装Anaconda,创建虚拟环境,之后克隆YOLOv5-5.0仓库到NX,安装所需要的包,最后下载yolov5.pt进行推理测试
虚拟环境
在NX的Chromium浏览器中,直接搜索Anaconda,到官网进行下载,注意要下载ARM64版本的,默认下载到Downloads文件夹下

也可以直接使用wget命令,在Terminal中进行下载,执行bash命令进行安装:
wget https://repo.anaconda.com/archive/Anaconda3-2022.05-Linux-aarch64.sh
bash Anaconda3-2022.05-Linux-aarch64.sh
之后一路Enter+yes,直到安装完成
重新打开Terminal,发现命令行最前面有了(base),如果没有的话,执行source activate命令,回车即可
下面创建YOLOv5-5.0的虚拟环境:
(base) nx@ubuntu:~$ conda create -n yolo python=3.6 -y
(base) nx@ubuntu:~$ conda activate yolo
下载v5.0仓库
在YOLOv5官网找到v5.0版本的仓库,直接下载到NX,然后cd到yolov5-5.0仓库

在yolo虚拟环境中,安装对应库:
(base) nx@ubuntu:~$ conda activate yolo
(yolo) nx@ubuntu:~$ cd yolov5-5.0/
(yolo) nx@ubuntu:~/yolov5-5.0$ pip install -r requirements.txt
推理Demo
下载yolov5.pt到yolov5-5.0文件夹中,执行detect.py进行测试:(注意,如果直接执行python detect.py,会自动下载最新版本的yolov5.pt,而不是5.0版本的,因为5.0版本和最新版本网络结构不同,因此会报错)
(yolo) nx@ubuntu:~/yolov5-5.0$ wget https://github.com/ultralytics/yolov5/releases/download/v5.0/yolov5s.pt
(yolo) nx@ubuntu:~/yolov5-5.0$ python detect.py
结果如下:
 bus bus
|
 zidane zidane
|
VScode连接NX
USB摄像头实时检测
首先,准备一个摄像头,可以是USB摄像头,或者官方配置的CSI-2接口摄像头,插到NX上
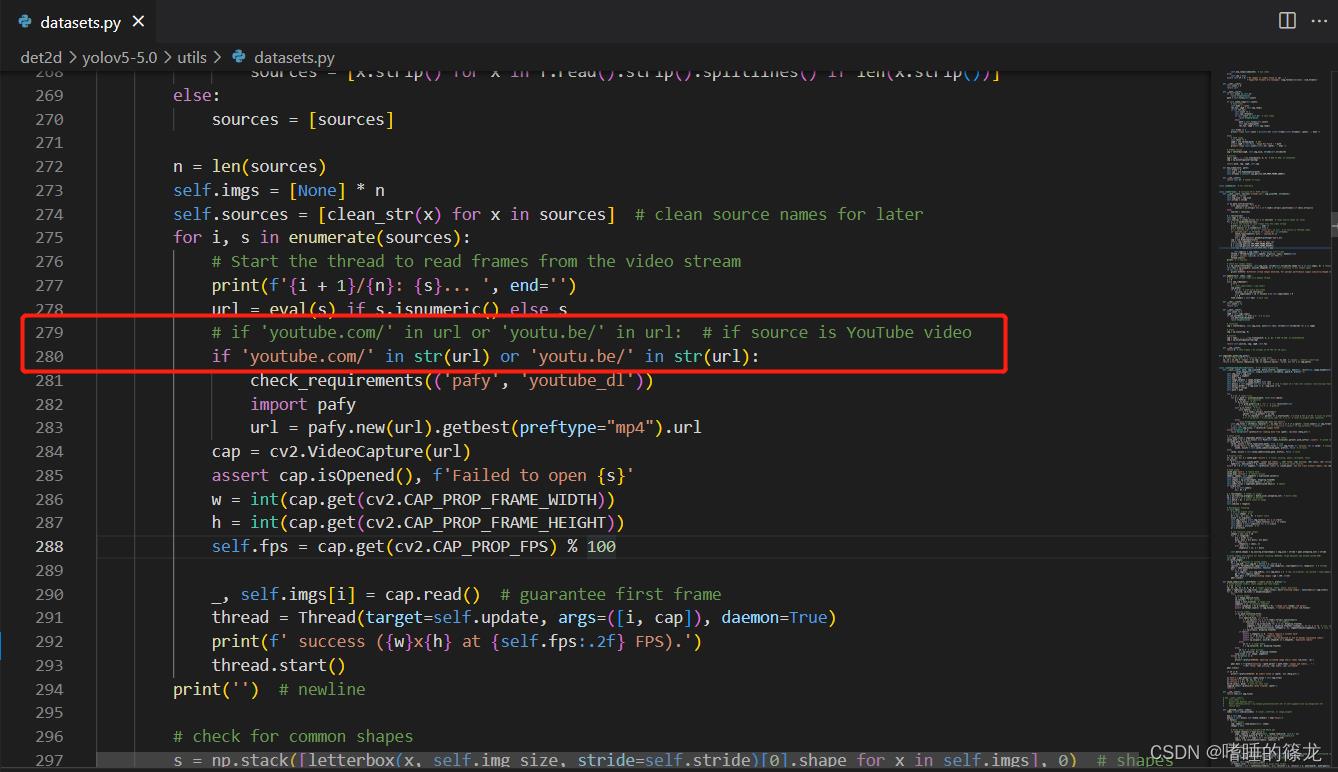
其次,修改datasets.py中的280行代码为:if 'youtube.com/' in str(url) or 'youtu.be/' in str(url):
然后,为了显示实时FPS,需要修改以下两个文件: datasets.py和detect.py
1、datasets.py:在utils/datasets.py文件的LoadStreams类中的__next__函数中,返回self.fps

2、detect.py:使用cv2.putText函数,在当前frame上显示文本,并在vid_cap前加个not,防止报错(原因:我们返回的只是fps值,而不是cap对象),如下图所示:

代码如下:
# Stream results
if view_img:
# 实时显示当前FPS 1000 / t2-t1 * 1000
cv2.putText(im0, "YOLOv5 FPS: 0".format(float('%.3f' % (1 / (t2 - t1)))), (100, 50),
cv2.FONT_HERSHEY_SIMPLEX, 1.5, (30,144,255), 3)
cv2.imshow(str(p), im0)
cv2.waitKey(1) # 1 millisecond
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else: # 'video' or 'stream'
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
if not vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
save_path += '.mp4'
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
vid_writer.write(im0)
最后,在Terminal中执行命令:python detect.py --source 0,结果如下:

(PS:这FPS实在是太感人了/(ㄒoㄒ)/~~,不过检测精度倒还可以(●ˇ∀ˇ●))
tensorrtx模型转换
接下来,是本文的重头戏:使用TensorRT加速部署YOLOv5!!!!基本流程如下:
- 使用tensorrtx/yolov5中的
gen_wts.py文件,在yolov5-5.0中将yolov5.pt转换为yolov5.wts文件 - 在tensorrtx/yolov5中进行编译,生成可执行文件yolov5
- 使用yolov5可执行文件来生成
yolov5.engine文件,即TensorRT模型
pt–>wts(在yolov5-5.0)
首先,下载tensorrtx-yolov5-v5.0,注意要选择yolov5-5.0版本,然后将tensorrtx-yolov5-v5.0/yolov5/gen_wts.py复制到yolov5-5.0/中,然后执行命令就可以在当前目录下,生成yolov5.wts文件
(yolo) nx@ubuntu:~/yolov5-5.0$ python gen_wts.py -w yolov5s.pt
wts–>engine(在tensorrtx-yolov5-v5.0)
之后切换到tensorrtx-yolov5-v5.0/yolov5/目录,新建build文件夹,然后cd到build文件夹中,进行编译:
(yolo) nx@ubuntu:~$ cd tensorrtx-yolov5-v5.0/yolov5/
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5$ mkdir build
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5$ cd build
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5/build$ cmake ..
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5/build$ make
!!此时要注意!! 如果我们要转换自己训练的模型,需要在编译前修改yololayer.h中的参数:
static constexpr int CLASS_NUM = 80; // 数据集的类别数
static constexpr int INPUT_H = 608;
static constexpr int INPUT_W = 608;
将其中的CLASS_NUM修改为自己的类别数量,然后重新执行上述编译流程
此时编译完成,生成了可执行文件yolov5,我们可以用这个可执行文件来生成.engine文件,首先把上一步得到的yolov5s.wts文件复制到build目录下,然后执行如下命令生成yolov5s.engine:
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5/build$ sudo ./yolov5 -s yolov5s.wts yolov5s.engine s
注意,这条指令中最后一个参数s表示模型的规模为s,如果我们使用的模型规模为n,l或x,需要把s改成对应的n,l或x
成功生成yolov5s.engine后就可以执行下述代码来进行一个小测试:
(yolo) nx@ubuntu:~/tensorrtx-yolov5-v5.0/yolov5/build$ ./yolov5 -d yolov5s.engine ../samples
此时在build目录下会得到检测的结果图,可以查看检测的效果:
 bus bus
|
 zidane zidane
|
USB摄像头实时检测
在生成yolov5s.engine之后,修改yolov5.cpp代码,调用USB摄像头实现实时检测,代码参考自:Jetson nano + yolov5 + TensorRT加速+调用usb摄像头,将以下代码直接替代yolov5.cpp原来的代码:
#include <iostream>
#include <chrono>
#include "cuda_utils.h"
#include "logging.h"
#include "common.hpp"
#include "utils.h"
#include "calibrator.h"
#define USE_FP16 // set USE_INT8 or USE_FP16 or USE_FP32
#define DEVICE 0 // GPU id
#define NMS_THRESH 0.4
#define CONF_THRESH 0.5
#define BATCH_SIZE 1
// stuff we know about the network and the input/output blobs
static const int INPUT_H = Yolo::INPUT_H;
static const int INPUT_W = Yolo::INPUT_W;
static const int CLASS_NUM = Yolo::CLASS_NUM;
static const int OUTPUT_SIZE = Yolo::MAX_OUTPUT_BBOX_COUNT * sizeof(Yolo::Detection) / sizeof(float) + 1; // we assume the yololayer outputs no more than MAX_OUTPUT_BBOX_COUNT boxes that conf >= 0.1
const char* INPUT_BLOB_NAME = "data";
const char* OUTPUT_BLOB_NAME = "prob";
static Logger gLogger;
// 数据集所有类别名称
char *my_classes[]= "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard","surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush" ;
static int get_width(int x, float gw, int divisor = 8)
//return math.ceil(x / divisor) * divisor
if (int(x * gw) % divisor == 0)
return int(x * gw);
return (int(x * gw / divisor) + 1) * divisor;
static int get_depth(int x, float gd)
if (x == 1)
return 1;
else
return round(x * gd) > 1 ? round(x * gd) : 1;
ICudaEngine* build_engine(unsigned int maxBatchSize, IBuilder* builder, IBuilderConfig* config, DataType dt, float& gd, float& gw, std::string& wts_name)
INetworkDefinition* network = builder->createNetworkV2(0U);
// Create input tensor of shape 3, INPUT_H, INPUT_W with name INPUT_BLOB_NAME
ITensor* data = network->addInput(INPUT_BLOB_NAME, dt, Dims3 3, INPUT_H, INPUT_W );
assert(data);
std::map<std::string, Weights> weightMap = loadWeights(wts_name);
/* ------ yolov5 backbone------ */
auto focus0 = focus(network, weightMap, *data, 3, get_width(64, gw), 3, "model.0");
auto conv1 = convBlock(network, weightMap, *focus0->getOutput(0), get_width(128, gw), 3, 2, 1, "model.1");
auto bottleneck_CSP2 = C3(network, weightMap, *conv1->getOutput(0), get_width(128, gw), get_width(128, gw), get_depth(3, gd), true, 1, 0.5, "model.2");
auto conv3 = convBlock(network, weightMap, *bottleneck_CSP2->getOutput(0), get_width(256, gw), 3, 2, 1, "model.3");
auto bottleneck_csp4 = C3(network, weightMap, *conv3->getOutput(0), get_width(256, gw), get_width(256, gw), get_depth(9, gd), true, 1, 0.5, "model.4");
auto conv5 = convBlock(network, weightMap, *bottleneck_csp4->getOutput(0), get_width(512, gw), 3, 2, 1, "model.5");
auto bottleneck_csp6 = C3(network, weightMap, *conv5->getOutput(0), get_width(512, gw), get_width(512, gw), get_depth(9, gd), true, 1, 0.5, "model.6");
auto conv7 = convBlock(network, weightMap, *bottleneck_csp6->getOutput(0), get_width(1024, gw), 3, 2, 1, "model.7");
auto spp8 = SPP(network, weightMap, *conv7->getOutput(0), get_width(1024, gw), get_width以上是关于模型部署Jetson Xavier NX(eMMC)部署YOLOv5-5.0的主要内容,如果未能解决你的问题,请参考以下文章