CBAM——即插即用的注意力模块(附代码)
Posted Billie使劲学
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了CBAM——即插即用的注意力模块(附代码)相关的知识,希望对你有一定的参考价值。
论文:CBAM: Convolutional Block Attention Module
代码: code
目录
(1)Channel attention module(CAM)
(2)Spatial attention module(SAM)
(3)Channel attention+spatial attention
前言
CBAM( Convolutional Block Attention Module )是一种轻量级注意力模块的提出于2018年,它可以在空间维度和通道维度上进行Attention操作。论文在Resnet和MobileNet上加入CBAM模块进行对比,并针对两个注意力模块应用的先后进行实验,同时进行CAM可视化,可以看到Attention更关注目标物体。
1.什么是CBAM?
CBAM(Convolutional Block Attention Module)是轻量级的卷积注意力模块,它结合了通道和空间的注意力机制模块。

上图可以看到,CBAM包含CAM(Channel Attention Module)和SAM(Spartial Attention Module)两个子模块,分别进行通道和空间上的Attention。这样不只能够节约参数和计算力,并且保证了其能够做为即插即用的模块集成到现有的网络架构中去。
由上图所示,有输入、通道注意力模块、空间注意力模块和输出组成。输入特征 ,然后是通道注意力模块一维卷积
,然后是通道注意力模块一维卷积 ,将卷积结果乘原图,将CAM输出结果作为输入,进行空间注意力模块的二维卷积
,将卷积结果乘原图,将CAM输出结果作为输入,进行空间注意力模块的二维卷积 ,再将输出结果与原图相乘。
,再将输出结果与原图相乘。
(1)Channel attention module(CAM)

通道注意力模块:通道维度不变,压缩空间维度。该模块关注输入图片中有意义的信息(分类任务就关注因为什么分成了不同类别)。
图解:将输入的feature map经过两个并行的MaxPool层和AvgPool层,将特征图从C*H*W变为C*1*1的大小,然后经过Share MLP模块,在该模块中,它先将通道数压缩为原来的1/r(Reduction,减少率)倍,再扩张到原通道数,经过ReLU激活函数得到两个激活后的结果。将这两个输出结果进行逐元素相加,再通过一个sigmoid激活函数得到Channel Attention的输出结果,再将这个输出结果乘原图,变回C*H*W的大小。
通道注意力公式:

CAM与SEnet的不同之处是加了一个并行的最大池化层,提取到的高层特征更全面,更丰富。论文中也对为什么如此改动做出了解释。
AvgPool & MaxPool对比实验

在channel attention中,表1对于pooling的使用进行了实验对比,发现avg & max的并行池化的效果要更好。这里也有可能是池化丢失的信息太多,avg&max的并行连接方式比单一的池化丢失的信息更少,所以效果会更好一点。
(2)Spatial attention module(SAM)

空间注意力模块:空间维度不变,压缩通道维度。该模块关注的是目标的位置信息。
图解:将Channel Attention的输出结果通过最大池化和平均池化得到两个1*H*W的特征图,然后经过Concat操作对两个特征图进行拼接,通过7*7卷积变为1通道的特征图(实验证明7*7效果比3*3好),再经过一个sigmoid得到Spatial Attention的特征图,最后将输出结果乘原图变回C*H*W大小。
空间注意力公式:

(3)CAM和SAM组合形式
通道注意力和空间注意力这两个模块能够以并行或者串行顺序的方式组合在一块儿,关于通道和空间上的串行顺序和并行作者进行了实验对比,发现先通道再空间的结果会稍微好一点。具体实验结果如下:
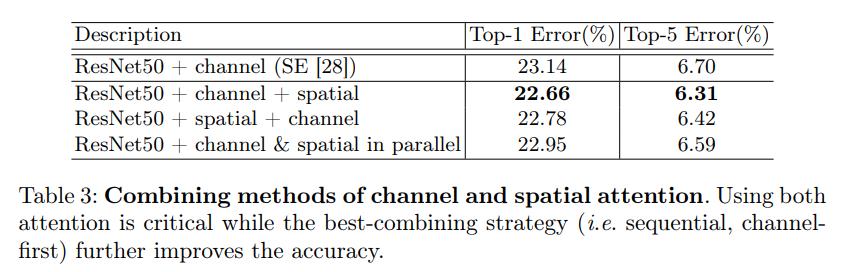
由表三可以看出,基于ResNet网络,两个Attention模块按Channel Attention + Spatial Attention的顺序效果会更好一些。
2.消融实验
(1)Channel attention
首先是不同的通道注意力结果比较,平均池化、最大池化和两种联合使用并使用共享MLP来进行推断保存参数,结果如下:
首先,参数量和内存损耗差距不大,而错误率的提高,显然两者联合的方法更优。

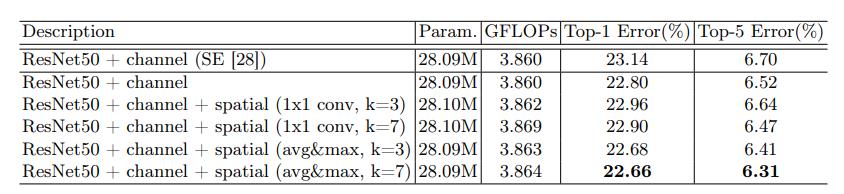
(2)Spatial attention
对比7*7卷积核和3*3卷积核的效果,结果7*7卷积核效果更好
(3)Channel attention+spatial attention
对比SEnet、CAM和SAM并行、SAM+CAM和CAM+SAM的效果,最终CAM+SAM效果最好 。

3.图像分类
再数据集ImageNet-1K上使用ResNet网络进行对比实验

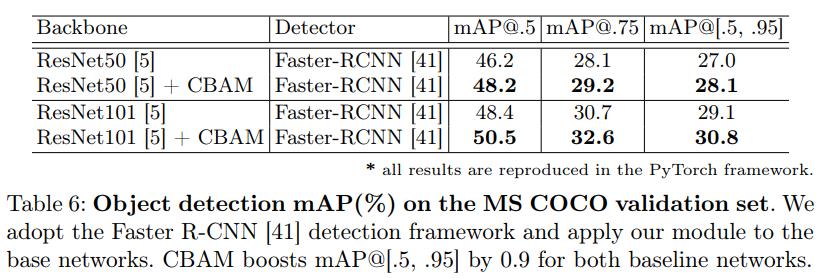
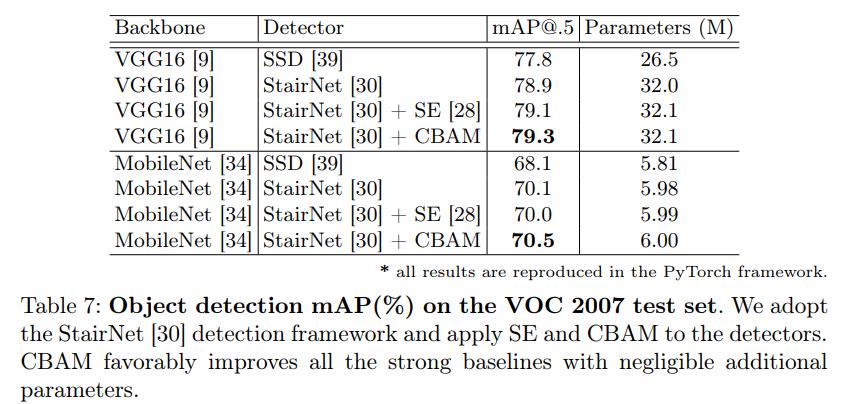
4.目标检测
数据集:MS COCO和VOC 2007
如下表所示:
MS COCO上,CBAM在识别任务上泛化性能较基线网络有了显著提高。。
如下表:
VOC 2007中,采用阶梯检测框架,并将SE和CBAM应用于检测器。CBAM极大的改善了所有强大的基线与微不足道的额外参数。
5.CBAM可视化
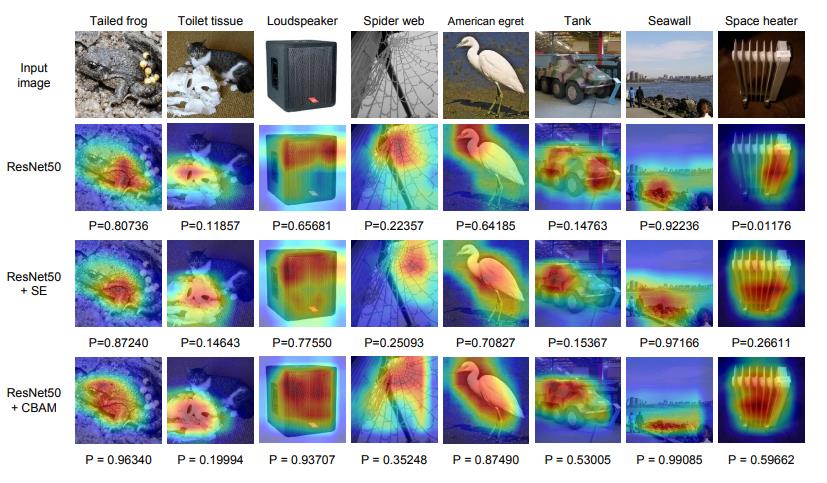
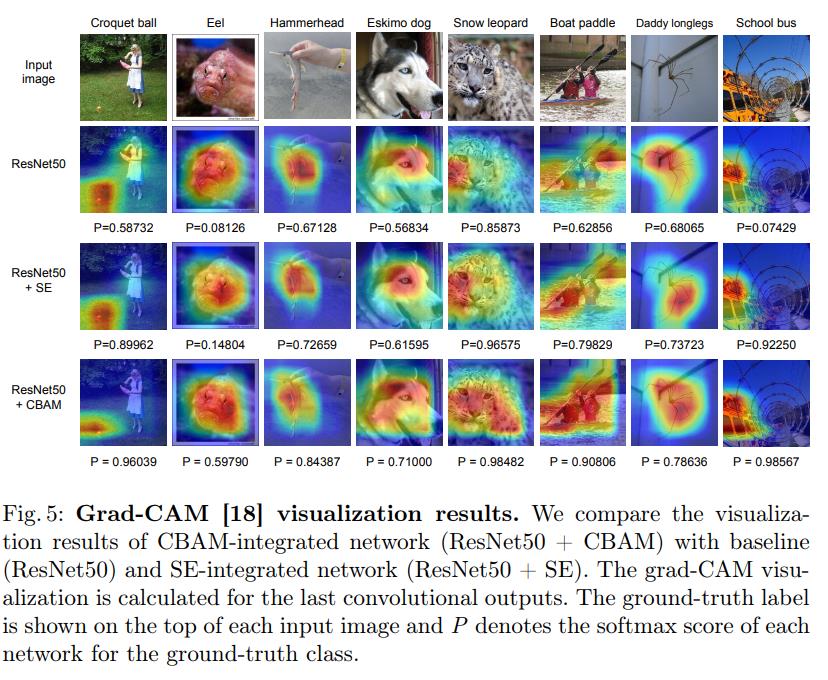
本文利用Grad CAM对不一样的网络进行可视化后,能够发现,引入 CBAM 后,特征覆盖到了待识别物体的更多部位,而且最终判别物体的几率也更高,这表示注意力机制的确让网络学会了关注重点信息。
6.Pytorch 代码实现
代码实现:
import torch
import torch.nn as nn
class CBAMLayer(nn.Module):
def __init__(self, channel, reduction=16, spatial_kernel=7):
super(CBAMLayer, self).__init__()
# channel attention 压缩H,W为1
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.avg_pool = nn.AdaptiveAvgPool2d(1)
# shared MLP
self.mlp = nn.Sequential(
# Conv2d比Linear方便操作
# nn.Linear(channel, channel // reduction, bias=False)
nn.Conv2d(channel, channel // reduction, 1, bias=False),
# inplace=True直接替换,节省内存
nn.ReLU(inplace=True),
# nn.Linear(channel // reduction, channel,bias=False)
nn.Conv2d(channel // reduction, channel, 1, bias=False)
)
# spatial attention
self.conv = nn.Conv2d(2, 1, kernel_size=spatial_kernel,
padding=spatial_kernel // 2, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
max_out = self.mlp(self.max_pool(x))
avg_out = self.mlp(self.avg_pool(x))
channel_out = self.sigmoid(max_out + avg_out)
x = channel_out * x
max_out, _ = torch.max(x, dim=1, keepdim=True)
avg_out = torch.mean(x, dim=1, keepdim=True)
spatial_out = self.sigmoid(self.conv(torch.cat([max_out, avg_out], dim=1)))
x = spatial_out * x
return x
x = torch.randn(1,1024,32,32)
net = CBAMLayer(1024)
y = net.forward(x)
print(y.shape)
总结
- CBAM中作者对两个注意力机制使用的先后顺序做了实验,发现通道注意力在空间注意力之前效果最好。
- 作者在实验中应用了grad-CAM来可视化feature map,是个非常有用的可视化手段,在图像分类任务中可以观察feature map的特征,解释了为什么模型将原图分类到某一类的结果。
- 加入CBAM模块不一定会给网络带来性能上的提升,受自身网络还有数据等其他因素影响,甚至会下降。如果网络模型的泛化能力已经很强,而你的数据集不是benchmarks而是自己采集的数据集的话,不建议加入CBAM模块。CBAM性能虽然改进的比SE高了不少,但绝不是无脑加入到网络里就能有提升的。也要根据自己的数据、网络等因素综合考量。
第一个不支持即插即用的NT式HelloWorld 驱动
1.安装好驱动包
2.编写源代码 Sources文件和makefile文件
##源代码
/********************************
*文件名称:Driver.h
*作者:左飞
*完成日期:2016-9-4
*********************************/
#pragma once //保证头文件只被编译一次
#ifdef __cplusplus
extern "C" //兼容C代码
{
#endif
#include <NTDDK.h>
#ifdef __cplusplus
}
#endif
#define PAGEDCODE code_seg("PAGE")
#define LOCKEDCODE code_seg()
#define INITCODE code_seg("INIT")
#define PAGEDDATA data_seg("PAGE")
#define LOCKEDDATA data_seg()
#define INITDATA data_seg("INIT")
#define arraysize(p) (sizeof(p)/sizeof((p)[0]))
typedef struct _DEVICE_EXTENSION {
PDEVICE_OBJECT pDevice;
UNICODE_STRING ustrDeviceName; //设备名称
UNICODE_STRING ustrSymLinkName; //符号链接名
} DEVICE_EXTENSION, *PDEVICE_EXTENSION;
//函数声明
NTSTATUS CreateDevice(IN PDRIVER_OBJECT pDriverObject);
VOID HelloDDKUnload(IN PDRIVER_OBJECT pDriverObject);
NTSTATUS HelloDDKDispatchRoutine(IN PDEVICE_OBJECT pDevObj,IN PIRP pIrp);
/*******************************
*文件名称:Driver.cpp
*作者:左飞
*完成日期:2016-9-5
********************************/
#include "Driver.h"
#pragma INITCODE //将driverEntry设在分页内存中,当驱动加载成功,此函数在内存中移除
extern "C" NTSTATUS DriverEntry(IN PDRIVER_OBJECT pDriverObject,
IN PUNICODE_STRING pRegistryPath)
{
NTSTATUS status;
KdPrint(("Enter DriverEntry\n"));
//注册其他驱动调用函数入口
pDriverObject->DriverUnload = HelloDDKUnload;
pDriverObject->MajorFunction[IRP_MJ_CREATE] = HelloDDKDispatchRoutine;
pDriverObject->MajorFunction[IRP_MJ_CLOSE] = HelloDDKDispatchRoutine;
pDriverObject->MajorFunction[IRP_MJ_WRITE] = HelloDDKDispatchRoutine;
pDriverObject->MajorFunction[IRP_MJ_READ] = HelloDDKDispatchRoutine;
//创建驱动设备对象
status = CreateDevice(pDriverObject);
KdPrint(("DriverEntry end"));
return status;
}
#pragma INITCODE
NTSTATUS CreateDevice(IN PDRIVER_OBJECT pDriverObject)
{
NTSTATUS status;
PDEVICE_OBJECT pDevObj;
PDEVICE_EXTENSION pDevExt;
//创建设备名称
UNICODE_STRING devName;
RtlInitUnicodeString(&devName,L"\\Device\\MyDDKDevice");
//创建设备
status = IoCreateDevice(pDriverObject,sizeof(DEVICE_EXTENSION),&(UNICODE_STRING)devName,FILE_DEVICE_UNKNOWN,0,TRUE,&pDevObj); //FILE_DEVICE_UNKNOWN此设备只能被一个应用程序所使用
if(!NT_SUCCESS(status))
return status;
pDevObj->Flags |= DO_BUFFERED_IO;
pDevExt = (PDEVICE_EXTENSION)pDevObj->DeviceExtension;
pDevExt->pDevice = pDevObj;
pDevExt->ustrDeviceName = devName;
//创建符号链接
UNICODE_STRING symLinkName;
RtlInitUnicodeString(&symLinkName,L"\\??\\HelloDDK");
pDevExt->ustrSymLinkName = symLinkName;
status = IoCreateSymbolicLink(&symLinkName,&devName);
if(!NT_SUCCESS(status))
{
IoDeleteDevice(pDevObj);
return status;
}
return STATUS_SUCCESS;
}
#pragma PAGEDCODE
VOID HelloDDKUnload(IN PDRIVER_OBJECT pDriverObject)
{
PDEVICE_OBJECT pNextObj;
KdPrint(("Enter DriverUnload\n"));
pNextObj = pDriverObject->DeviceObject;
while(pNextObj != NULL)
{
PDEVICE_EXTENSION pDevExt = (PDEVICE_EXTENSION)pNextObj->DeviceExtension;
//删除符号链接
UNICODE_STRING pLinkName = pDevExt->ustrSymLinkName;
IoDeleteSymbolicLink(&pLinkName);
pNextObj = pNextObj->NextDevice;
IoDeleteDevice(pDevExt->pDevice);
}
}
#pragma PAGEDCODE
NTSTATUS HelloDDKDispatchRoutine(IN PDEVICE_OBJECT pDevObj,IN PIRP pIrp)
{
KdPrint(("Enter HelloDDKDispatchRoutine\n"));
NTSTATUS status = STATUS_SUCCESS;
//完成IRP
pIrp->IoStatus.Status = status;
pIrp->IoStatus.Information = 0;
IoCompleteRequest(pIrp,IO_NO_INCREMENT);
KdPrint(("Leave HelloDDKDispatchRoutine\n"));
return status;
}
##sources文件
TARGETNAME=HelloDDK
TARGETTYPE=DRIVER
TARGETPATH=OBJ
INCLUDES=$(BASEDIR)\inc;\
&(BASEDIR)\inc\ddk;\
SOURCES=Driver.cpp\
##makefile文件
#
# DO NOT EDIT THIS FILE!!! Edit .\sources. if you want to add a new source
# file to this component. This file merely indirects to the real make file
# that is shared by all the driver components of the Windows NT DDK
#
!INCLUDE $(NTMAKEENV)\makefile.def
3.进入驱动编译环境
4.进入源码目录输入build命令
5.生成驱动程序
以上是关于CBAM——即插即用的注意力模块(附代码)的主要内容,如果未能解决你的问题,请参考以下文章