远场距离除了10λ和2D^2/λ还有别的吗?
Posted 无线认证x英利检测
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了远场距离除了10λ和2D^2/λ还有别的吗?相关的知识,希望对你有一定的参考价值。
远场距离始终是OTA测试中让大家头疼的一个因素。上一篇我们讨论了关于TRP的测试,为什么可以不用远场距离而使用更小的测试距离。但对于EIRP或其他方向性的测试项,却只能使用远场距离来进行。关于远场距离,我们曾经发过一篇文章,远场距离是10λ还是2D^2/λ,最近又有了一些新的发现,与大家分享。
01
—
远场距离还可以有哪些
先来回顾一下之前的主要内容:远场距离被认为是10倍波长的距离,这一考虑是从“源天线和测试天线之间相互耦合的影响”角度出发考虑的。当间距大于约10个波长时,这种影响可以忽略不计。根据对距离天线10个波长的极短偶极子天线进行的计算,电感场(inductive field)的电平(也就是反应场中会耦合的部分)将比辐射场的电平低36dB。一般对于较小的天线(电气尺寸在一个波长以下),远场距离R可以用10λ来近似表示。
而2D^2/λ的远场距离,是从“相位变化随测试天线口径的影响”角度去考虑的。发射天线辐射的电磁波的波前是一个球面,如果 AUT 与发射天线的距离不够远,AUT的相位分布容易产生较大的误差,根据IEEE规定的天线测量误差标准, 要求最大相位误差不大于 π/8,也就是22.5度。由此而推算出2D^2 /λ可以近似为相位误差符合要求的远场距离标准。
那是不是远场距离就一定是10λ,或者是2D^2/λ了呢?看起来并不是,远场距离的确定可以有不同的规则。我们在CTIA终端OTA测试标准《Test Plan for Wireless Device Over-the-Air Performance》中看到了不同频段的最小测试距离的规定如下表所示:
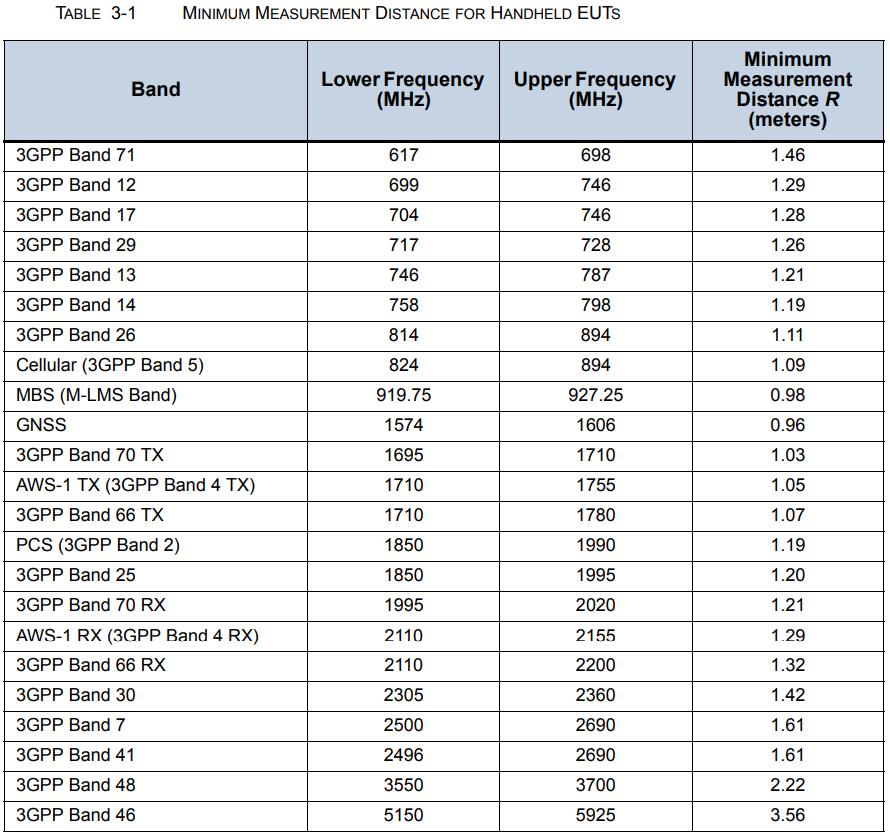
这个Minimum Measurement Distance R(最小测试距离)是如何得出的?
它有三种远场距离的计算规则,并选择了每个频段中最严格的距离做为最终远场测试距离。
- 规则一:需大于2D^2/λ(相位不确定性限值);
- 规则二:需大于3D(振幅不确定性限值);
- 规则三:需大于3λ(反应性近场限值);
其中D是EUT的尺寸,λ是所在频段的自由空间波长。对于自由空间测试,D只是EUT的最大尺寸,但对于头/手模型测试,头/手模型必须包括在D中。在CTIA标准中,D被选为头/手模型的那部分尺寸,它在确定EUT的TRP或TIS时起着重要作用,并定义D=300毫米。
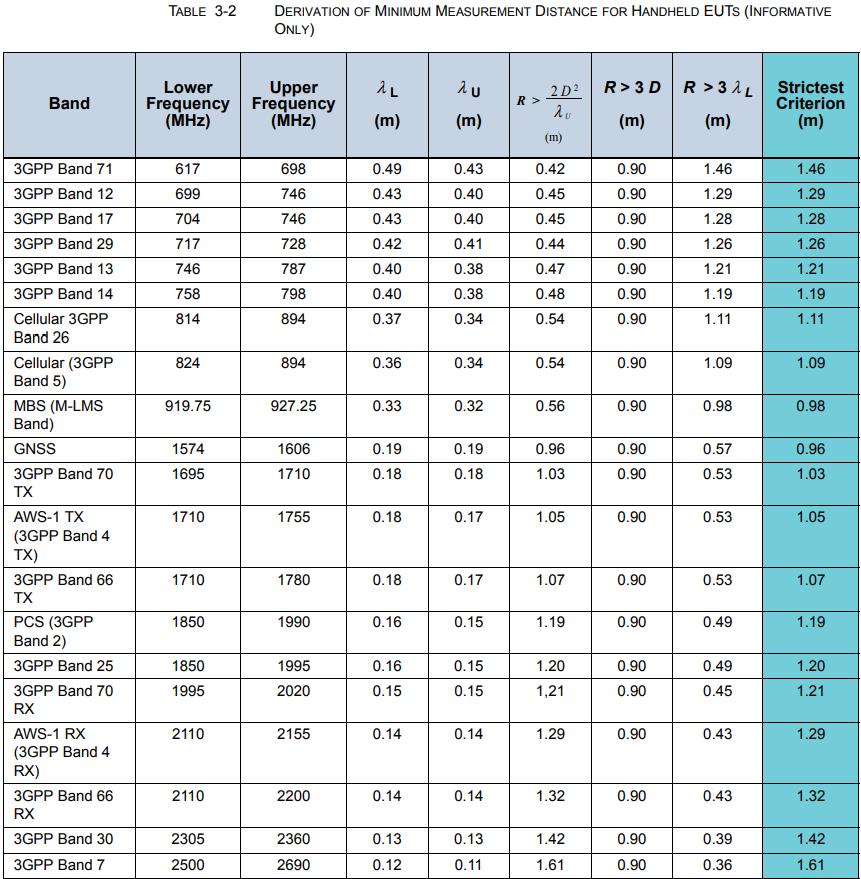
if D=300 mm;
Freq < 1GHz, 反应性近场限值3λ为最大远场距离;
Freq > 1.5GHz, 相位不确定性限值2D^2/λ为最大远场距离;
1GHz < Freq < 1.5GHz, 振幅不确定性限值3D为最大远场距离;所以算来算去,得到下表:

频率f的升高和D的增大,都会让2D^2/λ越来越大,因为:
2D^2/λ = 2D^2 × f/c = 2D^2 × f(Hz)/(3×10^8);02
—
远场距离规则选择
看来远场距离,是可以根据所需的测试而进行选择的,CTIA之所以可以选择最严格的规则作为远场距离,一是想对终端OTA测试环境的执行准则进行严格统一管理,二是因为针对目前的蜂窝网络,频率还不是太高,被测终端的尺寸还不是太大,最严格的远场距离在成本与尺寸方面也基本可行。
但如果是汽车的OTA测试,例如在5.9GHz频段,如果按照整个汽车的尺寸,比如D=6米计算,使用规则一,即2D^2/λ,远场距离大概是1416米,这实在是无法想象。即使不按照整车,只按照天线尺寸,比如D=1米计算,也需要大概40米的远场距离。
如果测试并不关心相位的不确定性(相位变化的影响是零陷点的幅度以及旁瓣的幅度值发生变化),大可不必非得使用2D^2/λ来计算远场距离。根据上述经验,3λ-10λ,或者3D等,都可以成为远场测试的距离。
以上信息由英利检测(Teslab)整理发布,欢迎一起讨论,我们一直在关注这方面的发展,如有引用也请注明出处。
国家高新技术企业;唯一覆盖中国和欧美运营商认证服务机构;业内最为优秀第三方认证服务商之一;专业的人做专业的事;
入库:┆移动┆联通┆电信┆中国广电┆
欧美:┆GCF┆PTCRB┆VzW┆ATT┆TMO┆FCC┆
中国:┆CCC┆SRRC┆CTA┆
号码:┆IMEI┆MAC┆MEID┆EAN┆
Lambda演算归约!归约!归约!
- x
- (λx.M)
- (M N)
以上是关于远场距离除了10λ和2D^2/λ还有别的吗?的主要内容,如果未能解决你的问题,请参考以下文章