基于速度伺服波浪补偿器的模糊自适应算法设计
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于速度伺服波浪补偿器的模糊自适应算法设计相关的知识,希望对你有一定的参考价值。
1、内容简介
略
483-可以交流、咨询、答疑
2、内容说明
随着对海洋的不断探索和海洋资源不断的使用,人们对速度伺服波浪补偿器的使用性能要求越来越高,对它的安全性、稳定性、准确性越来越更多的追求,本设计以最广泛应用型价高的速度伺服液压控制系统为研究,建立适应于其的模糊自适应算法。通过建立速度伺服液压控制系统的数学模型,并进行仿真,确定其为合理性的速度伺服液压系统。进一步以此速度伺服液压系统调试出适合其的模糊自适应算法,以提高系统的动态特性和稳态特性。减少起重机在海洋上受波浪影响,从而能广泛使用新型的波浪补偿器。
本文首先确定速度伺服波浪补偿器并分析其优点,接着建立其数学模型,分析每一元件的传递函数且仿真分析速度伺服液压控制系统的稳定性和动态性能。通过bode图和Nyquist图分析出速度伺服系统是稳定,又通过阶跃响应图分析得出其动态性能优良。其次提出模糊自适应算法,设计出模糊自适应控制器,并将其应用于速度伺服液压控制系统,通过仿真分析得出。建立在模糊自适算法后的速度伺服液压系统动态性能得到很大的改善,该液压系统能够快速、准确、准确的适应海浪作用的影响。
关键词:波浪补偿器;速度伺服液压系统;模糊自适应算法;仿真分析
21世纪是人类进一步开发利用和保护海洋的新世纪,蕴藏在海底的资源已成为世界各国能源开发的重点对象,是人类可持续发展的重要财富,尤其是近20多年来,随着人类深水域活动的频繁开展和海底资源新种类探索的不断发展,人们深刻认识到海洋高新技术是确保国家海洋权益资源安全和国家安全的重要保障。
海上船舶在进行吊放回收作业时,海浪的起伏会使船舶呈现复杂的运动如横摇、纵摇及垂直,进而会影响船舶上的吊放系统安全、可靠作业。如在高海况下,船与船之间的货物吊运可能会造成技术碰撞,严重时可能会使钢丝绳断裂,对船舶吊放作业和货物造成严重的损害。因此随着海洋资源的开发和利用,人们对海洋工程装备的使用性能要求越来越高,如何提高海洋工程装备的安全性、稳定性、准确性已成为一个重要研究课题。波浪补偿技术对于海洋资源勘探开采设备、海上货物吊运或补给有着重要的作用。目前波浪补偿技术使用的领域主要集中在海洋平台钻采作业、海上货物吊运、潜水器回收吊放、大洋采矿、舰船间物资转运(如航行的弹药、食品、燃油、补给)等方面。波浪补偿技术与速度伺服液压控制技术结合,采用模糊自适应算法,形成新型的波浪补偿技术,由液压执行元件、伺服阀、传感器,伺服放大器、AD、D/A转换模块、计算机、液压系统等组成,可以使系统组成更加简单,控制的准确性、快速性、稳定性得到大的提高,在未来的海洋装备领域中具有较大的市场占有率和巨大发展潜力。
速度伺服液压控制系统是一种自动控制系统,在此系统中,执行元件能以一定精度自动地按照输入信号的变化规律而动作,综合了电气控制和液压控制两方面的优点。电液控制技术能方便地与计算机相结合,使电液控制系统有很大的灵活性和充分利用计算机的信息处理能力,使系统具有更复杂的功能和更广泛的适应性,是国内比较先进的新型主动式波浪补偿液压伺服系统控制,其优点是具有控制灵活和适用领域广泛,同时控制的性能好。速度伺服控制液压回路图由伺服阀、速度传感器、液压马达、伺服放大器等液压元件组成,液压回路的液压原理图如图2—1所示。
图2—1速度波浪补偿器的液压回路图
由于波浪补偿系统为大功率系统,所以采用了阀控液压马达速度伺服控制系统,该系统主要由伺服放大器、电液伺服阀、液压马达、速度传感器组成,速度传感器与负载机轴相联,用于检测负载机轴的速度。检测到的速度信号与指令信号进行比较产生误差(误差信号)经伺服放大器进行功率放大,产生的电流用来控制电液伺服阀的阀芯位置,电液伺服阀输出压力油驱动液压马达及负载旋转。阀控液压马达速度伺服系统的结构如图1所示
图1 阀控液压马达速度伺服系统结构图
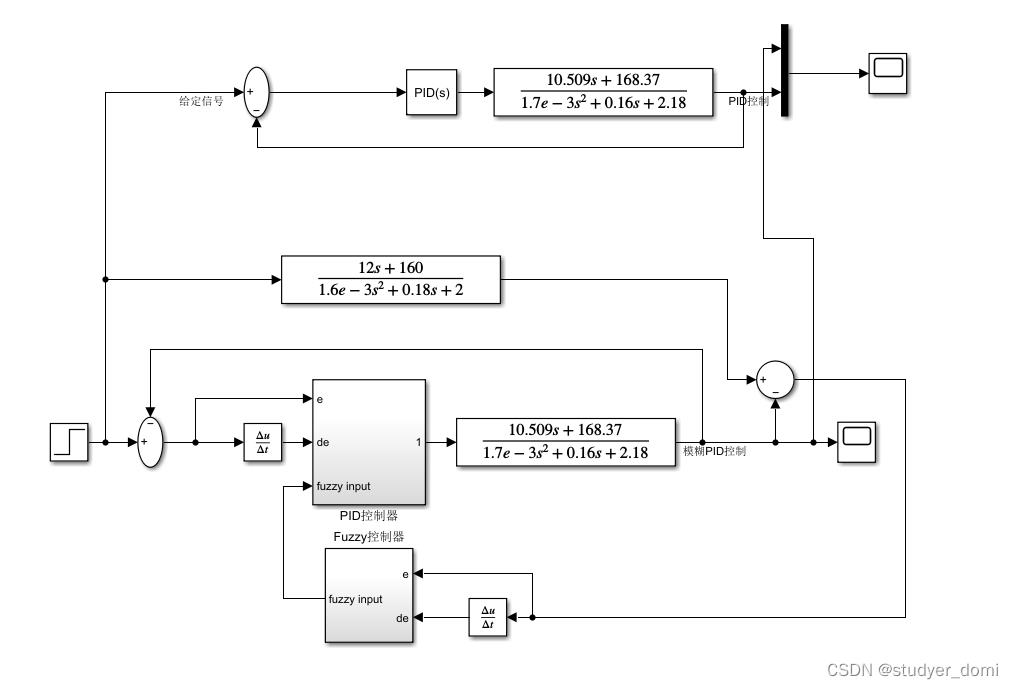
3、仿真分析
4、参考论文
略
以上是关于基于速度伺服波浪补偿器的模糊自适应算法设计的主要内容,如果未能解决你的问题,请参考以下文章