ros2订阅esp32发布的电池电压数据
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ros2订阅esp32发布的电池电压数据相关的知识,希望对你有一定的参考价值。
一个最简单的订阅和发布案例如下:
pub-
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
int main(int argc, char * argv[])
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("simple_publisher");
auto pub = node->create_publisher<std_msgs::msg::String>("/my_message", 10);
std_msgs::msg::String myMessage;
size_t counter0;
rclcpp::WallRate loop_rate(500ms);
while (rclcpp::ok())
myMessage.data = "Hello, ros2 world! " + std::to_string(counter++);
RCLCPP_INFO(node->get_logger(), "Publishing: '%s'", myMessage.data.c_str());
try
pub->publish(myMessage);
rclcpp::spin_some(node);
catch (const rclcpp::exceptions::RCLError & e)
RCLCPP_ERROR(node->get_logger(), "Errore type : %s", e.what());
loop_rate.sleep();
rclcpp::shutdown();
return 0;
sub-
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
std::shared_ptr<rclcpp::Node> node = nullptr;
void TopicCallback(const std_msgs::msg::String::SharedPtr msg)
RCLCPP_INFO(node->get_logger(), "I heard the message : '%s'", msg->data.c_str());
int main(int argc, char *argv[])
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("simple_subscriber");
auto sub = node->create_subscription<std_msgs::msg::String>("/my_message", 10, TopicCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
esp32参考:
esp32发布机器人电池电压到ros2(micro-ros+CoCube)
数据类型是float32,需要修改,开启float32发布和订阅:
发布
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/float32.hpp"
using namespace std::chrono_literals;
int main(int argc, char * argv[])
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("simple_publisher");
auto pub = node->create_publisher<std_msgs::msg::Float32>("/my_message", 10);
std_msgs::msg::Float32 myMessage;
rclcpp::WallRate loop_rate(500ms);
while (rclcpp::ok())
myMessage.data++;
RCLCPP_INFO(node->get_logger(), "Publishing: '%f'", myMessage.data);
try
pub->publish(myMessage);
rclcpp::spin_some(node);
catch (const rclcpp::exceptions::RCLError & e)
RCLCPP_ERROR(node->get_logger(), "Errore type : %s", e.what());
loop_rate.sleep();
rclcpp::shutdown();
return 0;
订阅
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/float32.hpp"
std::shared_ptr<rclcpp::Node> node = nullptr;
void TopicCallback(const std_msgs::msg::Float32::SharedPtr msg)
RCLCPP_INFO(node->get_logger(), "I heard the message : '%f'", msg->data);
int main(int argc, char *argv[])
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("simple_subscriber");
auto sub = node->create_subscription<std_msgs::msg::Float32>("/my_message", 10, TopicCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
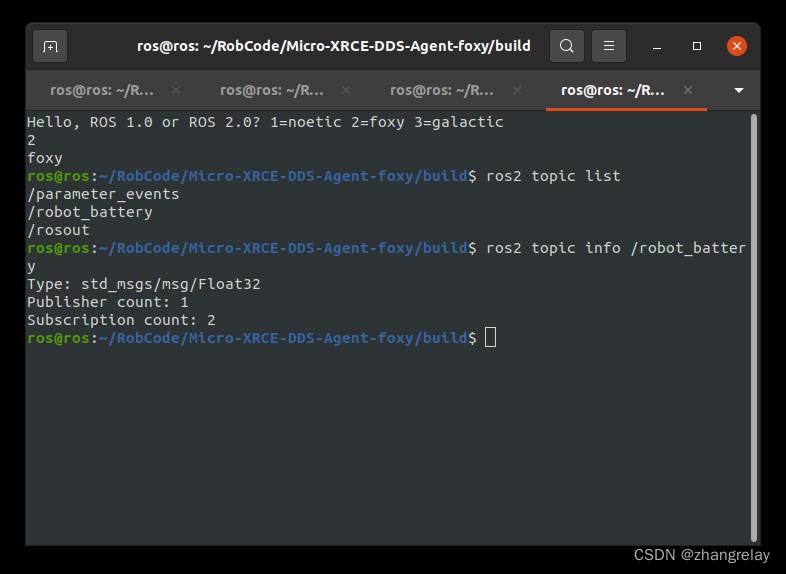
再稍作修改,可以得到订阅esp32机器人电池电压的数据:
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/float32.hpp"
std::shared_ptr<rclcpp::Node> node = nullptr;
void TopicCallback(const std_msgs::msg::Float32::SharedPtr msg)
RCLCPP_INFO(node->get_logger(), "Robot battery voltage : '%f'", msg->data);
int main(int argc, char *argv[])
rclcpp::init(argc, argv);
node = std::make_shared<rclcpp::Node>("battery_sub");
auto sub = node->create_subscription<std_msgs::msg::Float32>("/robot_battery", 1, TopicCallback);
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
还遇到一些小问题^_^
#include <cstdio> #include <memory> #include "rclcpp/rclcpp.hpp" #include "rclcpp_components/register_node_macro.hpp" #include "std_msgs/msg/string.hpp" #include "demo_nodes_cpp/visibility_control.h" namespace demo_nodes_cpp class ListenerBestEffort : public rclcpp::Node public: DEMO_NODES_CPP_PUBLIC explicit ListenerBestEffort(const rclcpp::NodeOptions & options) : Node("listener", options) setvbuf(stdout, NULL, _IONBF, BUFSIZ); auto callback = [this](std_msgs::msg::String::ConstSharedPtr msg) -> void RCLCPP_INFO(this->get_logger(), "I heard: [%s]", msg->data.c_str()); ; sub_ = create_subscription<std_msgs::msg::String>("chatter", rclcpp::SensorDataQoS(), callback); private: rclcpp::Subscription<std_msgs::msg::String>::SharedPtr sub_; ; // namespace demo_nodes_cpp RCLCPP_COMPONENTS_REGISTER_NODE(demo_nodes_cpp::ListenerBestEffort)
以上是关于ros2订阅esp32发布的电池电压数据的主要内容,如果未能解决你的问题,请参考以下文章