001--python--基础--python安装
001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装
Posted 像风一样的男人@
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了python --opencv图像处理轮廓(寻找轮廓绘制轮廓)详解相关的知识,希望对你有一定的参考价值。
轮廓是一系列相连的点组成的曲线,代表了物体的基本外形,相对于边缘,轮廓是连续的,边缘并不全部连续。
寻找轮廓 OpenCV 为我们提供了一个现成的函数 findContours() 。
import cv2 as cv
img = cv.imread("black.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(thresh, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
print(len(contours[0]))
这段代码先用 threshold() 对图像进行降噪处理,它的原型函数如下:
retval, dst = cv.threshold(src, thresh, maxval, type[, dst] )
enum ThresholdTypes
THRESH_BINARY = 0, # 大于阈值的部分被置为 255 ,小于部分被置为 0
THRESH_BINARY_INV = 1, # 大于阈值部分被置为 0 ,小于部分被置为 255
THRESH_TRUNC = 2, # 大于阈值部分被置为 threshold ,小于部分保持原样
THRESH_TOZERO = 3, # 小于阈值部分被置为 0 ,大于部分保持不变
THRESH_TOZERO_INV = 4, # 大于阈值部分被置为 0 ,小于部分保持不变
THRESH_OTSU = 8, # 自动处理,图像自适应二值化,常用区间 [0,255] ;
查找轮廓使用的函数为 findContours() ,它的原型函数如下:
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
cv2.RETR_EXTERNAL 表示只检测外轮廓。
cv2.RETR_LIST 检测的轮廓不建立等级关系。
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE 建立一个等级树结构的轮廓。
cv2.CHAIN_APPROX_NONE 存储所有的轮廓点。
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息。
这里可以使用 print(len(contours[0])) 函数将包含的点的数量打印出来,比如在上面的示例中,使用参数 cv2.CHAIN_APPROX_NONE 轮廓点有 1382 个,而使用参数 cv2.CHAIN_APPROX_SIMPLE 则轮廓点只有 4 个。
绘制轮廓使用到的 OpenCV 为我们提供的 drawContours() 这个函数,下面是它的三个简单的例子:
# To draw all the contours in an image:
cv2.drawContours(img, contours, -1, (0,255,0), 3)
# To draw an individual contour, say 4th contour:
cv2.drawContours(img, contours, 3, (0,255,0), 3)
# But most of the time, below method will be useful:
cnt = contours[4]
cv2.drawContours(img, [cnt], 0, (0,255,0), 3)
drawContours() 函数中有五个参数:
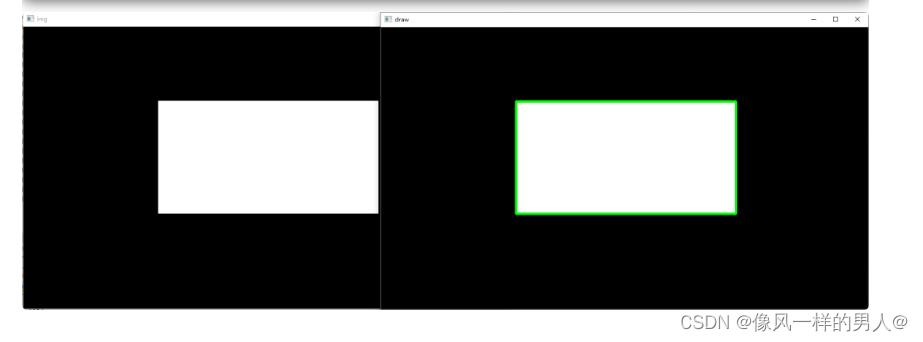
我们接着前面的示例把使用 findContours() 找出来的轮廓绘制出来:
import cv2 as cv
img = cv.imread("black.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow("img", img)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
print(len(contours[0]))
# 绘制绿色轮廓
cv.drawContours(img, contours, -1, (0,255,0), 3)
cv.imshow("draw", img)
cv.waitKey(0)
cv.destroyAllWindows()
特征矩可以帮助我们计算一些图像的特征,例如物体的质心,物体的面积等,使用的函数为 moments() 。
moments() 函数会将计算得到的矩以字典形式返回。
import cv2 as cv
img = cv.imread("number.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
cnt = contours[0]
# 获取图像矩
M = cv.moments(cnt)
print(M)
# 质心
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])
print(f'质心为:[cx, cy]')
这时,我们取得了这个图像的矩,矩 M 中包含了很多轮廓的特征信息,除了示例中展示的质心的计算,还有如 M[‘m00’] 表示轮廓面积。
轮廓面积
area = cv.contourArea(cnt)
print(f'轮廓面积为:area')
这里取到的轮廓面积和上面 M[‘m00’] 保持一致。
轮廓周长
perimeter = cv.arcLength(cnt, True)
print(f'轮廓周长为:perimeter')
参数 True 表示轮廓是否封闭,我们这里的轮廓是封闭的,所以这里写 True 。
轮廓外接矩形分为正矩形和最小矩形。使用 cv2.boundingRect(cnt) 来获取轮廓的外接正矩形,它不考虑物体的旋转,所以该矩形的面积一般不会最小;使用 cv.minAreaRect(cnt) 可以获取轮廓的外接最小矩形。
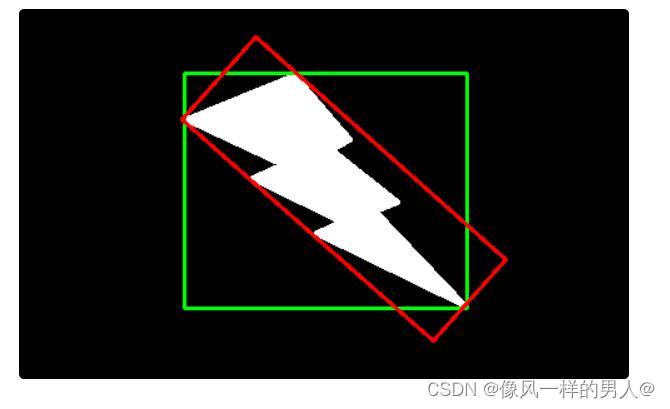
两者的区别如上图,绿线代表的是外接正矩形,红线代表的是外接最小矩形,代码如下:
import cv2 as cv
import numpy as np
img = cv.imread("number.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
cnt = contours[0]
# 外接正矩形
x, y, w, h = cv.boundingRect(cnt)
cv.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 外接最小矩形
min_rect = cv.minAreaRect(cnt)
print(min_rect)
box = cv.boxPoints(min_rect)
box = np.int0(box)
cv.drawContours(img, [box], 0, (0, 0, 255), 2)
cv.imshow("draw", img)
cv.waitKey(0)
cv.destroyAllWindows()
boundingRect() 函数的返回值包含四个值,矩形框左上角的坐标 (x, y) 、宽度 w 和高度 h 。
minAreaRect() 函数的返回值中还包含旋转信息,返回值信息为包括中心点坐标 (x,y) ,宽高 (w, h) 和旋转角度。
根据我们指定的精度,它可以将轮廓形状近似为顶点数量较少的其他形状。它是由 Douglas-Peucker 算法实现的。
OpenCV 提供的函数是 approxPolyDP(cnt, epsilon, True) ,第二个参数 epsilon 用于轮廓近似的精度,表示原始轮廓与其近似轮廓的最大距离,值越小,近似轮廓越拟合原轮廓。第三个参数指定近似轮廓是否是闭合的。具体用法如下:
import cv2 as cv
img = cv.imread("number.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
cnt = contours[0]
# 计算 epsilon ,按照周长百分比进行计算,分别取周长 1% 和 10%
epsilon_1 = 0.1 * cv.arcLength(cnt, True)
epsilon_2 = 0.01 * cv.arcLength(cnt, True)
# 进行多边形逼近
approx_1 = cv.approxPolyDP(cnt, epsilon_1, True)
approx_2 = cv.approxPolyDP(cnt, epsilon_2, True)
# 画出多边形
image_1 = cv.cvtColor(gray_img, cv.COLOR_GRAY2BGR)
image_2 = cv.cvtColor(gray_img, cv.COLOR_GRAY2BGR)
cv.polylines(image_1, [approx_1], True, (0, 0, 255), 2)
cv.polylines(image_2, [approx_2], True, (0, 0, 255), 2)
cv.imshow("image_1", image_1)
cv.imshow("image_2", image_2)
cv.waitKey(0)
cv.destroyAllWindows()
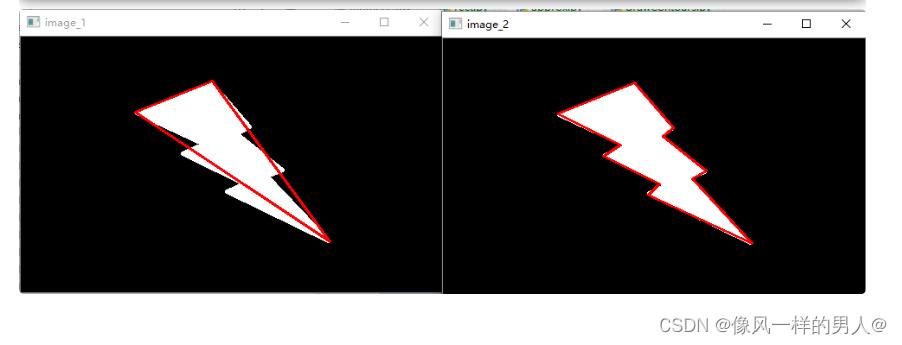
第一张图是 epsilon 为原始轮廓周长的 10% 时的近似轮廓,第二张图中绿线就是 epsilon 为原始轮廓周长的 1% 时的近似轮廓。
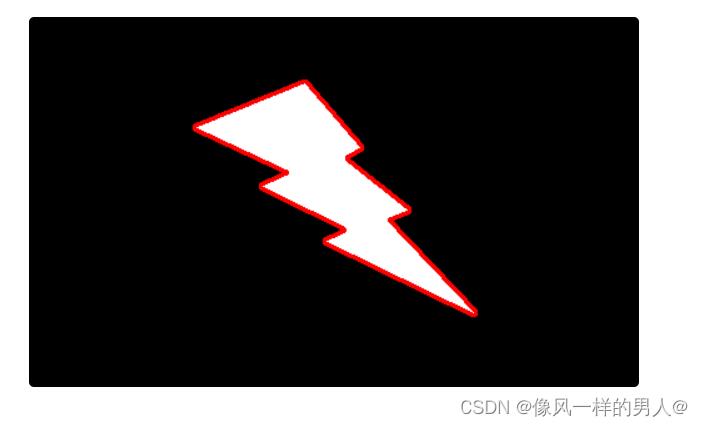
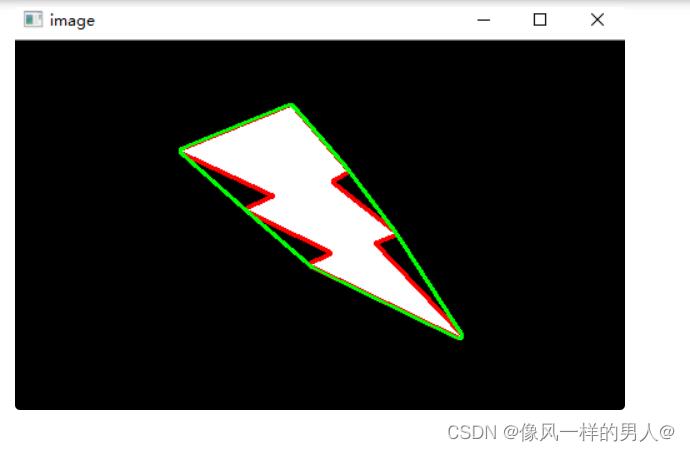
凸包外观看起来与轮廓逼近相似,只不过它是物体最外层的「凸」多边形。
如下图,红色的部分为手掌的凸包,双箭头部分表示凸缺陷(Convexity Defects),凸缺陷常用来进行手势识别等。

import cv2 as cv
img = cv.imread("number.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
cnt = contours[0]
# 绘制轮廓
image = cv.cvtColor(gray_img, cv.COLOR_GRAY2BGR)
cv.drawContours(image, contours, -1, (0, 0 , 255), 2)
# 寻找凸包,得到凸包的角点
hull = cv.convexHull(cnt)
# 绘制凸包
cv.polylines(image, [hull], True, (0, 255, 0), 2)
cv.imshow("image", image)
cv.waitKey(0)
cv.destroyAllWindows()
还有一个函数,是可以用来判断图形是否凸形的:
print(cv.isContourConvex(hull)) # True
它的返回值是 True 或者 False 。
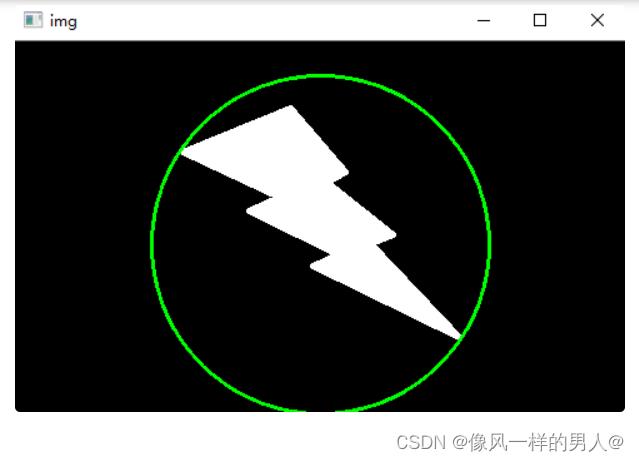
接下来,使用函数 cv.minEnclosingCircle() 查找对象的圆周。它是一个以最小面积完全覆盖物体的圆。
import cv2 as cv
img = cv.imread("number.png")
gray_img = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 降噪
ret, thresh = cv.threshold(gray_img, 127, 255, 0)
# 寻找轮廓
contours, hierarchy = cv.findContours(gray_img, cv.RETR_TREE, cv.CHAIN_APPROX_NONE)
cnt = contours[0]
# 绘制最小外接圆
(x, y), radius = cv.minEnclosingCircle(cnt)
center = (int(x), int(y))
radius = int(radius)
cv.circle(img, center, radius, (0, 255, 0), 2)
cv.imshow("img", img)
cv.waitKey(0)
cv.destroyAllWindows()
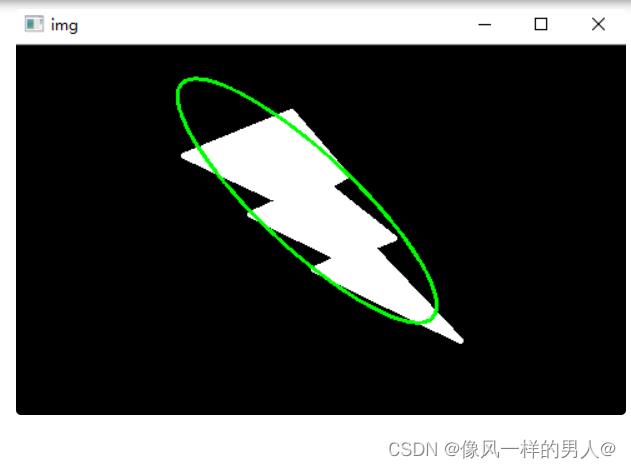
下一个是把一个椭圆拟合到一个物体上。它返回内接椭圆的旋转矩形。
ellipse = cv.fitEllipse(cnt)
cv.ellipse(img, ellipse, (0, 255, 0), 2)
001--python--基础--python安装
001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装 001--python--基础--python安装
以上是关于python --opencv图像处理轮廓(寻找轮廓绘制轮廓)详解的主要内容,如果未能解决你的问题,请参考以下文章