四GPIO结构和启动文件
Posted 初见未晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四GPIO结构和启动文件相关的知识,希望对你有一定的参考价值。
GPIO结构和启动文件
1、GPIO结构和工作模式
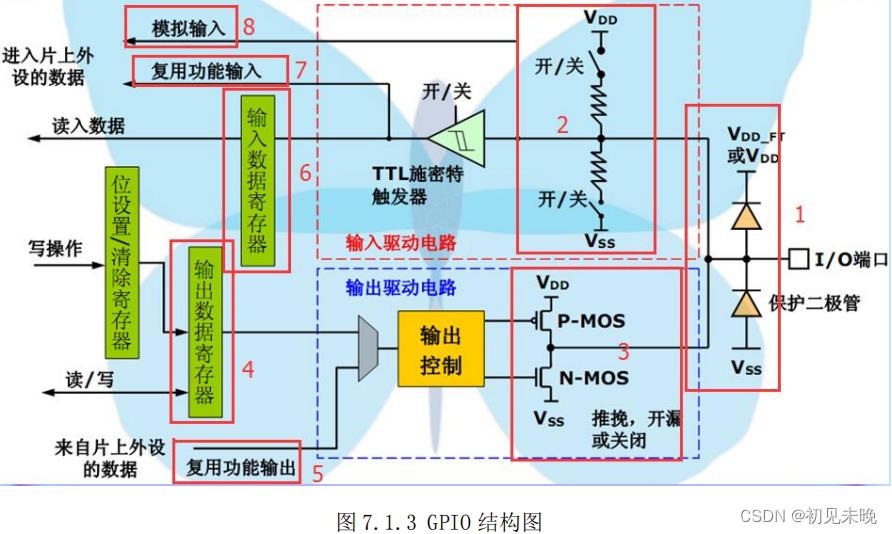
(1)最右端I/O端口是STM32芯片的引脚,其它部分都在STM32芯片内部;
(2)引脚内部加上两个保护二级管可以防止引脚外部过高或过低的电压输入,当引脚电压高于VDD_FT 或 VDD 时,上方的二极管导通吸收这个高电压,当引脚
电压低于VSS 时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁。
(3)输入模式(模拟、上拉、下拉、浮空)
通过配置上下拉电阻开关,可以控制引脚的默认状态电平,可以消除引脚不定状态的影响。一般情况下会给引脚设置成上拉或者下拉模式,使它有一个默认状态。
上拉输入模式:开启上拉时引脚默认电压为高电平;
下拉输入模式:开启下拉时引脚默认电压为低电平;
浮空模式:将上拉和下拉的开关都关断,此时输入的电平是不确定的,完全由外部的输入决定,一般接按键的时候可以使用这个模式。
模拟输入:GPIO引脚用于ADC采集电压的输入通道。
(4)输出模式(推挽、开漏、模拟)
推挽输出模式:
输入一个高电平时,P-MOS 管导通,N-MOS 管截止,对外输出高电平(3.3V)。输入一个低电平时,P-MOS 管截止,N-MOS 管导通,对外输出低电平(0V)。如果当切换输入高低电平时,两个MOS管将轮流导通,一个负责灌电流(电流输出到负载),一个负责拉电流(负载电流流向芯片),使其负载能力和开关速度都比普通的方式有很大的提高。
推挽输出模式一般应用在输出电平为 0-3.3V 而且需要高速切换开关状态的场合。除了必须要用开漏输出模式的场合,一般选择推挽输出模式。
开漏输出模式:
输入低电平时,P-MOS管处于关闭状态,N-MOS 管导通,输出即为低电平。
输入高电平时,P-MOS管处于关闭状态,N-MOS 管截止,这个时候引脚状态既不是高电平,又不是低电平,称之为高阻态。
多个开漏输出模式的引脚接在一起,只要有一个引脚为低电平,其他所有管脚都为低,即把所有引脚连接在一起的这条总线拉低了。只有当所有引脚输出高阻态时这条总线的电平才由上拉电阻的 VDD 决定。如果 VDD 连接的是3.3V,那么引脚输出的就是3.3V,如果VDD连接的是5V,那么引脚输出的就是5V。
如果想要让 STM32管脚输出5V,可以选择开漏输出模式,然后在外接上拉电阻的电源 VDD选择5V即可,开漏输出模式一般应用在 I2C、SMBUS 通讯等需要“线与”功能的总线电路中。
输出模式时速度可配置,有2MHz\\25MHz\\50MHz 的选项。此处的输出速度即 I/O 支持的高低电平状态最高切换频率,支持的频率越高,功耗越大,如果功耗要求不严格,把速度设置成最大即可。
模拟输出模式:双 MOS 管结构被关闭,施密特触发器停用,上/下拉也被禁止,一般用于DAC采集。
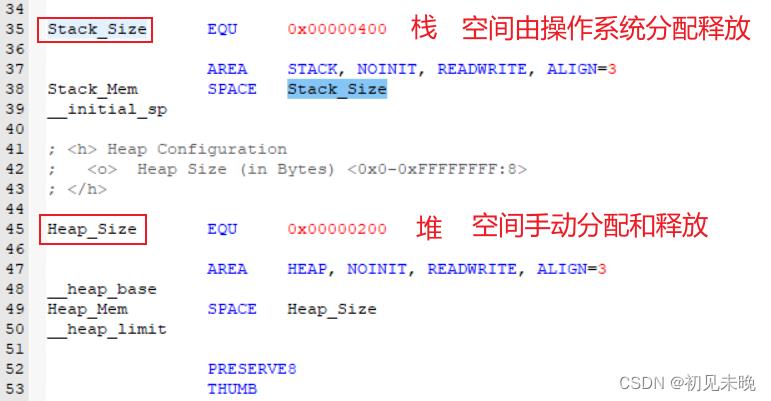
2、启动文件.s
(1)初始化堆栈指针 SP;
(2)初始化程序计数器指针 PC;
(3)设置堆、栈的大小;
(4)设置中断向量表的入口地址;
(5)配置外部 SRAM 作为数据存储器(这个由用户配置,一般的开发板可没有外
部 SRAM);
(6)调用 SystemInit() 函数配置 STM32 的系统时钟。
注:
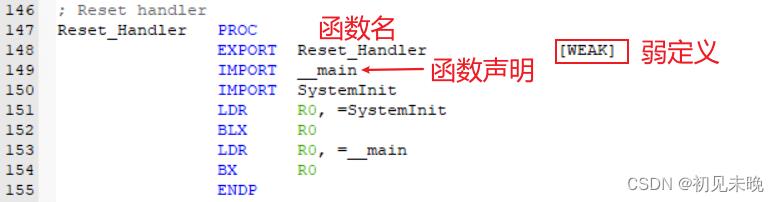
1)PROC 是子程序定义伪指令,相当于 C 语言里定义了一个函数,函数名为 Reset_Handler。
2)EXPORT 表示 Reset_Handler 这个子程序可供其他模块调用。 相当于 C 语言的函数声明。关键字[WEAK] 表示弱定义,如果编译器发现在别处定义了同名的函数,则在链接时用别处的地址进行链接,如果其它地方没有定义,编译器也不报错,以此处地址进行链接。
3)IMPORT 说明 __main 和 SystemInit 这两个标号在其他文件,在链接的时候需要到其他文件去寻找。相当于 C 语言中,从其它文件引入函数声明。以便下面对外部函数进行调用。
4)SystemInit 需要由自己实现,即编写一个具有该名称的函数,用来初始化 STM32 芯片的时钟,一般包括初始化 AHB、 APB 等各总线的时钟。需要经过一系列的配置 STM32 才能达到稳定运行的状态。
(7)设置 C 库的分支入口“ __main”(最终用来调用 main 函数) ;
__main 其实不是自己定义的(和 C 语言中的 main 函数不同),当编译器编译时,只要遇到这个标号就会定义这个函数,该函数的主要功能是:负责初始化栈、堆,配置系统环境,准备好 C 语言并在最后跳转到用户自定义的 main 函数。
因此,需要在外部定义一个SystemInit 函数设置 STM32 的时钟; STM32 上电后,会执行 SystemInit 函数,最后执行C 语言中的 main 函数。
(8)在 STM32 中凡是使用到外设功能,都要使能对应的RCC外设时钟,否则即使配置好端口初始化也无法正常使用。
编辑 2023.03.26 21:18 首次编辑
注:本文旨于自己的学习笔记,禁止转载。
无法更改 gpio 值
【中文标题】无法更改 gpio 值【英文标题】:Unable to change gpio value 【发布时间】:2014-08-05 13:34:47 【问题描述】:目前我正在尝试在 2.6.39 linux 内核上使用 systemd 检查 Tixi 板的启动时间。为此,我创建了一个服务文件,该文件调用一个设置和使用 gpio 的 bash 脚本。问题是我的系统不允许我更改 gpio 的值。我可以成功地导出它,改变它的方向,但不能改变它的值。我已连接示波器以检查硬件中的值是否已更改,但未按照某些论坛的建议在文件中更新,但它是相同的:值只是没有改变! 我还应该指出,如果我使用系统 V,相同的脚本也可以工作,内核、busybox 和文件系统的配置完全相同。
这很讽刺,因为我已经是系统的根,但是即使更改文件的权限,也不允许我更改其值。内核也没有反馈说该操作是不可能的,而是看起来好像是可能的,但是当我检查值时,它和以前一样。
我还尝试使用 3.12(我将其更改为 systemd)在 Raspbian 中运行它,实际上它是可以做到的,只是从用户空间以正常方式。
如果您知道可能是什么问题,我将不胜感激,因为我的想法已经用完了。
谢谢
PS:这是应该在 bash 行上运行的代码:
echo 0 > /sys/class/gpio/gpio104/value
more /sys/class/gpio/gpio104/value
// I get 1 not 0 as I requested
尽管如此,如果我使用 systemV,同一块板上的相同代码行可以工作,但如果我使用 systemd,则不能
【问题讨论】:
区分工作内核和非工作内核之间的驱动程序源和配置。或者你的意思是它在不同的硬件上工作?如果是这样,内核可能不知道如何在这个硬件上操作 GPIO,你需要修复它,或者你没有控制你正在探测的引脚。 嗨,克里斯。我已经尝试查看内核是否无法识别 GPIO。我编辑了这个问题,以便其他人都知道这一点。正如我在那里所说,如果我使用系统 V,脚本和 gpios 在用户空间上工作,但是当我更改为具有完全相同配置的 systemd 时,它就不再工作了。 系统 V 与 systemd 的唯一区别是,还是您使用不同的内核二进制文件引导不同的安装? 对于 systemd 必须使用 (e)glibc 和 udev。这是两个系统之间仅有的三个区别。其他一切都保持不变。 如果是我卡在这个问题上,我会修改内核 gpio 驱动程序以在每次执行操作时 printk。 【参考方案1】:可能是因为您的新设置中缺少 udev,这会更改 /sys/class 中那些 gpio 的权限。您可能只想放回 udev 看看它是否能解决您的问题。
我不知道您的图像设置,但每个 gpio 引脚都需要在使用前导出。你是这样做的还是自动完成的?如果您有 omap mux 内核开关,您可以执行以下操作:
echo 0x104 > /sys/kernel/debug/omap_mux/cam_d5 (set mode 4 as stipulate in TI Sitara TRM)
echo 104 > /sys/class/gpio/export (export the pin)
echo out > /sys/class/gpio/gpio104/direction (set the pin as output)
也做一个 dmesg | grep gpio 看看gpio mux是否有初始化问题。
【讨论】:
【参考方案2】:其实我也遇到过和你类似的问题,就是无法手动修改gpio pin的值
最后得到的结果是即使那个pin的名字是gpio它也只能用于输入(DM3730 gpiO_114和gpio_115)。
所以请参考数据表并确认它可以用于 I/O 操作..
【讨论】:
嘿巫师,我已经确定这些引脚可以用于输入/输出,因为如果我使用 sysV 但如果我使用 systemd 则不能。以上是关于四GPIO结构和启动文件的主要内容,如果未能解决你的问题,请参考以下文章