OpenCV“迷雾”车道识别的反思
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV“迷雾”车道识别的反思相关的知识,希望对你有一定的参考价值。
标题有些拗口,就这样吧。
这个例子就是为了说明,算力离智能还有很远很远的距离。
机器人迷雾之算力与智能_zhangrelay的博客-CSDN博客
测试图片如下:
 |
 |
 |
 |
 |
| 车道图 |
其中第一幅图是仿真案例:
ROS2+Gazebo+OpenCV之mobot仿真视觉传感器_zhangrelay的博客-CSDN博客
在如上文章中提及。
同时,可以参考:
机器人方向的刚性需求→个人思考←_zhangrelay的博客-CSDN博客
| 只有一个图可用,如下: |
 |
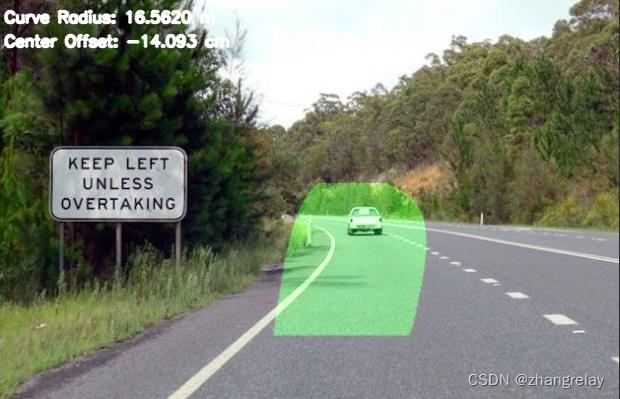
一看效果太好了,可以上路测试啦。
其实,换个图基本就不行了,但是人眼分辨所有测试图都是不会出错的。
看个离谱的:
 |
| 妙不妙? |
更离谱的:
 |
| 慌不慌? |
疑问一:参数不合适。
反问,人在不同城市开车或者走路的时候,会先调参数吗?
疑问二:算法不够智能。
反问,算法是计算方法,和智能有联系,但关联性参考:
“机器人迷雾之算力与智能“
疑问三,这种方式合适吗。
思考:先抛开算法,仅仅考虑算力,类比一个人类指标智力。
开车开的好的人,一定学历高吗?
赛车手中,高学历一定成绩有优势吗……
还是先回归常识,再搞算法,否则,事倍功半。
目前,有会独立思考的机器人程序吗?或者真正意义上的智能体?
附录
测试算法如下(引用):
import cv2 # Import the OpenCV library to enable computer vision
import numpy as np # Import the NumPy scientific computing library
import edge_detection as edge # Handles the detection of lane lines
import matplotlib.pyplot as plt # Used for plotting and error checking
# Author: Addison Sears-Collins
# Description: Implementation of the Lane class
# Make sure the video file is in the same directory as your code
filename = 'orig_lane_detection_1.mp4'
file_size = (1920,1080) # Assumes 1920x1080 mp4
scale_ratio = 1 # Option to scale to fraction of original size.
# We want to save the output to a video file
output_filename = 'orig_lane_detection_1_lanes.mp4'
output_frames_per_second = 20.0
# Global variables
prev_leftx = None
prev_lefty = None
prev_rightx = None
prev_righty = None
prev_left_fit = []
prev_right_fit = []
prev_leftx2 = None
prev_lefty2 = None
prev_rightx2 = None
prev_righty2 = None
prev_left_fit2 = []
prev_right_fit2 = []
class Lane:
"""
Represents a lane on a road.
"""
def __init__(self, orig_frame):
"""
Default constructor
:param orig_frame: Original camera image (i.e. frame)
"""
self.orig_frame = orig_frame
# This will hold an image with the lane lines
self.lane_line_markings = None
# This will hold the image after perspective transformation
self.warped_frame = None
self.transformation_matrix = None
self.inv_transformation_matrix = None
# (Width, Height) of the original video frame (or image)
self.orig_image_size = self.orig_frame.shape[::-1][1:]
width = self.orig_image_size[0]
height = self.orig_image_size[1]
self.width = width
self.height = height
# Four corners of the trapezoid-shaped region of interest
# You need to find these corners manually.
self.roi_points = np.float32([
(int(0.456*width),int(0.544*height)), # Top-left corner
(0, height-1), # Bottom-left corner
(int(0.958*width),height-1), # Bottom-right corner
(int(0.6183*width),int(0.544*height)) # Top-right corner
])
# The desired corner locations of the region of interest
# after we perform perspective transformation.
# Assume image width of 600, padding == 150.
self.padding = int(0.25 * width) # padding from side of the image in pixels
self.desired_roi_points = np.float32([
[self.padding, 0], # Top-left corner
[self.padding, self.orig_image_size[1]], # Bottom-left corner
[self.orig_image_size[
0]-self.padding, self.orig_image_size[1]], # Bottom-right corner
[self.orig_image_size[0]-self.padding, 0] # Top-right corner
])
# Histogram that shows the white pixel peaks for lane line detection
self.histogram = None
# Sliding window parameters
self.no_of_windows = 10
self.margin = int((1/12) * width) # Window width is +/- margin
self.minpix = int((1/24) * width) # Min no. of pixels to recenter window
# Best fit polynomial lines for left line and right line of the lane
self.left_fit = None
self.right_fit = None
self.left_lane_inds = None
self.right_lane_inds = None
self.ploty = None
self.left_fitx = None
self.right_fitx = None
self.leftx = None
self.rightx = None
self.lefty = None
self.righty = None
# Pixel parameters for x and y dimensions
self.YM_PER_PIX = 7.0 / 400 # meters per pixel in y dimension
self.XM_PER_PIX = 3.7 / 255 # meters per pixel in x dimension
# Radii of curvature and offset
self.left_curvem = None
self.right_curvem = None
self.center_offset = None
def calculate_car_position(self, print_to_terminal=False):
"""
Calculate the position of the car relative to the center
:param: print_to_terminal Display data to console if True
:return: Offset from the center of the lane
"""
# Assume the camera is centered in the image.
# Get position of car in centimeters
car_location = self.orig_frame.shape[1] / 2
# Fine the x coordinate of the lane line bottom
height = self.orig_frame.shape[0]
bottom_left = self.left_fit[0]*height**2 + self.left_fit[
1]*height + self.left_fit[2]
bottom_right = self.right_fit[0]*height**2 + self.right_fit[
1]*height + self.right_fit[2]
center_lane = (bottom_right - bottom_left)/2 + bottom_left
center_offset = (np.abs(car_location) - np.abs(
center_lane)) * self.XM_PER_PIX * 100
if print_to_terminal == True:
print(str(center_offset) + 'cm')
self.center_offset = center_offset
return center_offset
def calculate_curvature(self, print_to_terminal=False):
"""
Calculate the road curvature in meters.
:param: print_to_terminal Display data to console if True
:return: Radii of curvature
"""
# Set the y-value where we want to calculate the road curvature.
# Select the maximum y-value, which is the bottom of the frame.
y_eval = np.max(self.ploty)
# Fit polynomial curves to the real world environment
left_fit_cr = np.polyfit(self.lefty * self.YM_PER_PIX, self.leftx * (
self.XM_PER_PIX), 2)
right_fit_cr = np.polyfit(self.righty * self.YM_PER_PIX, self.rightx * (
self.XM_PER_PIX), 2)
# Calculate the radii of curvature
left_curvem = ((1 + (2*left_fit_cr[0]*y_eval*self.YM_PER_PIX + left_fit_cr[
1])**2)**1.5) / np.absolute(2*left_fit_cr[0])
right_curvem = ((1 + (2*right_fit_cr[
0]*y_eval*self.YM_PER_PIX + right_fit_cr[
1])**2)**1.5) / np.absolute(2*right_fit_cr[0])
# Display on terminal window
if print_to_terminal == True:
print(left_curvem, 'm', right_curvem, 'm')
self.left_curvem = left_curvem
self.right_curvem = right_curvem
return left_curvem, right_curvem
def calculate_histogram(self,frame=None,plot=True):
"""
Calculate the image histogram to find peaks in white pixel count
:param frame: The warped image
:param plot: Create a plot if True
"""
if frame is None:
frame = self.warped_frame
# Generate the histogram
self.histogram = np.sum(frame[int(
frame.shape[0]/2):,:], axis=0)
if plot == True:
# Draw both the image and the histogram
figure, (ax1, ax2) = plt.subplots(2,1) # 2 row, 1 columns
figure.set_size_inches(10, 5)
ax1.imshow(frame, cmap='gray')
ax1.set_title("Warped Binary Frame")
ax2.plot(self.histogram)
ax2.set_title("Histogram Peaks")
plt.show()
return self.histogram
def display_curvature_offset(self, frame=None, plot=False):
"""
Display curvature and offset statistics on the image
:param: plot Display the plot if True
:return: Image with lane lines and curvature
"""
image_copy = None
if frame is None:
image_copy = self.orig_frame.copy()
else:
image_copy = frame
cv2.putText(image_copy,'Curve Radius: '+str((
self.left_curvem+self.right_curvem)/2)[:7]+' m', (int((
5/600)*self.width), int((
20/338)*self.height)), cv2.FONT_HERSHEY_SIMPLEX, (float((
0.5/600)*self.width)),(
255,255,255),2,cv2.LINE_AA)
cv2.putText(image_copy,'Center Offset: '+str(
self.center_offset)[:7]+' cm', (int((
5/600)*self.width), int((
40/338)*self.height)), cv2.FONT_HERSHEY_SIMPLEX, (float((
0.5/600)*self.width)),(
255,255,255),2,cv2.LINE_AA)
if plot==True:
cv2.imshow("Image with Curvature and Offset", image_copy)
return image_copy
def get_lane_line_previous_window(self, left_fit, right_fit, plot=False):
"""
Use the lane line from the previous sliding window to get the parameters
for the polynomial line for filling in the lane line
:param: left_fit Polynomial function of the left lane line
:param: right_fit Polynomial function of the right lane line
:param: plot To display an image or not
"""
# margin is a sliding window parameter
margin = self.margin
# Find the x and y coordinates of all the nonzero
# (i.e. white) pixels in the frame.
nonzero = self.warped_frame.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Store left and right lane pixel indices
left_lane_inds = ((nonzerox > (left_fit[0]*(
nonzeroy**2) + left_fit[1]*nonzeroy + left_fit[2] - margin)) & (
nonzerox < (left_fit[0]*(
nonzeroy**2) + left_fit[1]*nonzeroy + left_fit[2] + margin)))
right_lane_inds = ((nonzerox > (right_fit[0]*(
nonzeroy**2) + right_fit[1]*nonzeroy + right_fit[2] - margin)) & (
nonzerox < (right_fit[0]*(
nonzeroy**2) + right_fit[1]*nonzeroy + right_fit[2] + margin)))
self.left_lane_inds = left_lane_inds
self.right_lane_inds = right_lane_inds
# Get the left and right lane line pixel locations
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
global prev_leftx2
global prev_lefty2
global prev_rightx2
global prev_righty2
global prev_left_fit2
global prev_right_fit2
# Make sure we have nonzero pixels
if len(leftx)==0 or len(lefty)==0 or len(rightx)==0 or len(righty)==0:
leftx = prev_leftx2
lefty = prev_lefty2
rightx = prev_rightx2
righty = prev_righty2
self.leftx = leftx
self.rightx = rightx
self.lefty = lefty
self.righty = righty
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
# Add the latest polynomial coefficients
prev_left_fit2.append(left_fit)
prev_right_fit2.append(right_fit)
# Calculate the moving average
if len(prev_left_fit2) > 10:
prev_left_fit2.pop(0)
prev_right_fit2.pop(0)
left_fit = sum(prev_left_fit2) / len(prev_left_fit2)
right_fit = sum(prev_right_fit2) / len(prev_right_fit2)
self.left_fit = left_fit
self.right_fit = right_fit
prev_leftx2 = leftx
prev_lefty2 = lefty
prev_rightx2 = rightx
prev_righty2 = righty
# Create the x and y values to plot on the image
ploty = np.linspace(
0, self.warped_frame.shape[0]-1, self.warped_frame.shape[0])
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]
self.ploty = ploty
self.left_fitx = left_fitx
self.right_fitx = right_fitx
if plot==True:
# Generate images to draw on
out_img = np.dstack((self.warped_frame, self.warped_frame, (
self.warped_frame)))*255
window_img = np.zeros_like(out_img)
# Add color to the left and right line pixels
out_img[nonzeroy[left_lane_inds], nonzerox[left_lane_inds]] = [255, 0, 0]
out_img[nonzeroy[right_lane_inds], nonzerox[right_lane_inds]] = [
0, 0, 255]
# Create a polygon to show the search window area, and recast
# the x and y points into a usable format for cv2.fillPoly()
margin = self.margin
left_line_window1 = np.array([np.transpose(np.vstack([
left_fitx-margin, ploty]))])
left_line_window2 = np.array([np.flipud(np.transpose(np.vstack([
left_fitx+margin, ploty])))])
left_line_pts = np.hstack((left_line_window1, left_line_window2))
right_line_window1 = np.array([np.transpose(np.vstack([
right_fitx-margin, ploty]))])
right_line_window2 = np.array([np.flipud(np.transpose(np.vstack([
right_fitx+margin, ploty])))])
right_line_pts = np.hstack((right_line_window1, right_line_window2))
# Draw the lane onto the warped blank image
cv2.fillPoly(window_img, np.int_([left_line_pts]), (0,255, 0))
cv2.fillPoly(window_img, np.int_([right_line_pts]), (0,255, 0))
result = cv2.addWeighted(out_img, 1, window_img, 0.3, 0)
# Plot the figures
figure, (ax1, ax2, ax3) = plt.subplots(3,1) # 3 rows, 1 column
figure.set_size_inches(10, 10)
figure.tight_layout(pad=3.0)
ax1.imshow(cv2.cvtColor(self.orig_frame, cv2.COLOR_BGR2RGB))
ax2.imshow(self.warped_frame, cmap='gray')
ax3.imshow(result)
ax3.plot(left_fitx, ploty, color='yellow')
ax3.plot(right_fitx, ploty, color='yellow')
ax1.set_title("Original Frame")
ax2.set_title("Warped Frame")
ax3.set_title("Warped Frame With Search Window")
plt.show()
def get_lane_line_indices_sliding_windows(self, plot=False):
"""
Get the indices of the lane line pixels using the
sliding windows technique.
:param: plot Show plot or not
:return: Best fit lines for the left and right lines of the current lane
"""
# Sliding window width is +/- margin
margin = self.margin
frame_sliding_window = self.warped_frame.copy()
# Set the height of the sliding windows
window_height = np.int(self.warped_frame.shape[0]/self.no_of_windows)
# Find the x and y coordinates of all the nonzero
# (i.e. white) pixels in the frame.
nonzero = self.warped_frame.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Store the pixel indices for the left and right lane lines
left_lane_inds = []
right_lane_inds = []
# Current positions for pixel indices for each window,
# which we will continue to update
leftx_base, rightx_base = self.histogram_peak()
leftx_current = leftx_base
rightx_current = rightx_base
# Go through one window at a time
no_of_windows = self.no_of_windows
for window in range(no_of_windows):
# Identify window boundaries in x and y (and right and left)
win_y_low = self.warped_frame.shape[0] - (window + 1) * window_height
win_y_high = self.warped_frame.shape[0] - window * window_height
win_xleft_low = leftx_current - margin
win_xleft_high = leftx_current + margin
win_xright_low = rightx_current - margin
win_xright_high = rightx_current + margin
cv2.rectangle(frame_sliding_window,(win_xleft_low,win_y_low),(
win_xleft_high,win_y_high), (255,255,255), 2)
cv2.rectangle(frame_sliding_window,(win_xright_low,win_y_low),(
win_xright_high,win_y_high), (255,255,255), 2)
# Identify the nonzero pixels in x and y within the window
good_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xleft_low) & (
nonzerox < win_xleft_high)).nonzero()[0]
good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) &
(nonzerox >= win_xright_low) & (
nonzerox < win_xright_high)).nonzero()[0]
# Append these indices to the lists
left_lane_inds.append(good_left_inds)
right_lane_inds.append(good_right_inds)
# If you found > minpix pixels, recenter next window on mean position
minpix = self.minpix
if len(good_left_inds) > minpix:
leftx_current = np.int(np.mean(nonzerox[good_left_inds]))
if len(good_right_inds) > minpix:
rightx_current = np.int(np.mean(nonzerox[good_right_inds]))
# Concatenate the arrays of indices
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# Extract the pixel coordinates for the left and right lane lines
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
# Fit a second order polynomial curve to the pixel coordinates for
# the left and right lane lines
left_fit = None
right_fit = None
global prev_leftx
global prev_lefty
global prev_rightx
global prev_righty
global prev_left_fit
global prev_right_fit
# Make sure we have nonzero pixels
if len(leftx)==0 or len(lefty)==0 or len(rightx)==0 or len(righty)==0:
leftx = prev_leftx
lefty = prev_lefty
rightx = prev_rightx
righty = prev_righty
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
# Add the latest polynomial coefficients
prev_left_fit.append(left_fit)
prev_right_fit.append(right_fit)
# Calculate the moving average
if len(prev_left_fit) > 10:
prev_left_fit.pop(0)
prev_right_fit.pop(0)
left_fit = sum(prev_left_fit) / len(prev_left_fit)
right_fit = sum(prev_right_fit) / len(prev_right_fit)
self.left_fit = left_fit
self.right_fit = right_fit
prev_leftx = leftx
prev_lefty = lefty
prev_rightx = rightx
prev_righty = righty
if plot==True:
# Create the x and y values to plot on the image
ploty = np.linspace(
0, frame_sliding_window.shape[0]-1, frame_sliding_window.shape[0])
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]
# Generate an image to visualize the result
out_img = np.dstack((
frame_sliding_window, frame_sliding_window, (
frame_sliding_window))) * 255
# Add color to the left line pixels and right line pixels
out_img[nonzeroy[left_lane_inds], nonzerox[left_lane_inds]] = [255, 0, 0]
out_img[nonzeroy[right_lane_inds], nonzerox[right_lane_inds]] = [
0, 0, 255]
# Plot the figure with the sliding windows
figure, (ax1, ax2, ax3) = plt.subplots(3,1) # 3 rows, 1 column
figure.set_size_inches(10, 10)
figure.tight_layout(pad=3.0)
ax1.imshow(cv2.cvtColor(self.orig_frame, cv2.COLOR_BGR2RGB))
ax2.imshow(frame_sliding_window, cmap='gray')
ax3.imshow(out_img)
ax3.plot(left_fitx, ploty, color='yellow')
ax3.plot(right_fitx, ploty, color='yellow')
ax1.set_title("Original Frame")
ax2.set_title("Warped Frame with Sliding Windows")
ax3.set_title("Detected Lane Lines with Sliding Windows")
plt.show()
return self.left_fit, self.right_fit
def get_line_markings(self, frame=None):
"""
Isolates lane lines.
:param frame: The camera frame that contains the lanes we want to detect
:return: Binary (i.e. black and white) image containing the lane lines.
"""
if frame is None:
frame = self.orig_frame
# Convert the video frame from BGR (blue, green, red)
# color space to HLS (hue, saturation, lightness).
hls = cv2.cvtColor(frame, cv2.COLOR_BGR2HLS)
################### Isolate possible lane line edges ######################
# Perform Sobel edge detection on the L (lightness) channel of
# the image to detect sharp discontinuities in the pixel intensities
# along the x and y axis of the video frame.
# sxbinary is a matrix full of 0s (black) and 255 (white) intensity values
# Relatively light pixels get made white. Dark pixels get made black.
_, sxbinary = edge.threshold(hls[:, :, 1], thresh=(120, 255))
sxbinary = edge.blur_gaussian(sxbinary, ksize=3) # Reduce noise
# 1s will be in the cells with the highest Sobel derivative values
# (i.e. strongest lane line edges)
sxbinary = edge.mag_thresh(sxbinary, sobel_kernel=3, thresh=(110, 255))
######################## Isolate possible lane lines ######################
# Perform binary thresholding on the S (saturation) channel
# of the video frame. A high saturation value means the hue color is pure.
# We expect lane lines to be nice, pure colors (i.e. solid white, yellow)
# and have high saturation channel values.
# s_binary is matrix full of 0s (black) and 255 (white) intensity values
# White in the regions with the purest hue colors (e.g. >130...play with
# this value for best results).
s_channel = hls[:, :, 2] # use only the saturation channel data
_, s_binary = edge.threshold(s_channel, (130, 255))
# Perform binary thresholding on the R (red) channel of the
# original BGR video frame.
# r_thresh is a matrix full of 0s (black) and 255 (white) intensity values
# White in the regions with the richest red channel values (e.g. >120).
# Remember, pure white is bgr(255, 255, 255).
# Pure yellow is bgr(0, 255, 255). Both have high red channel values.
_, r_thresh = edge.threshold(frame[:, :, 2], thresh=(120, 255))
# Lane lines should be pure in color and have high red channel values
# Bitwise AND operation to reduce noise and black-out any pixels that
# don't appear to be nice, pure, solid colors (like white or yellow lane
# lines.)
rs_binary = cv2.bitwise_and(s_binary, r_thresh)
### Combine the possible lane lines with the possible lane line edges #####
# If you show rs_binary visually, you'll see that it is not that different
# from this return value. The edges of lane lines are thin lines of pixels.
self.lane_line_markings = cv2.bitwise_or(rs_binary, sxbinary.astype(
np.uint8))
return self.lane_line_markings
def histogram_peak(self):
"""
Get the left and right peak of the histogram
Return the x coordinate of the left histogram peak and the right histogram
peak.
"""
midpoint = np.int(self.histogram.shape[0]/2)
leftx_base = np.argmax(self.histogram[:midpoint])
rightx_base = np.argmax(self.histogram[midpoint:]) + midpoint
# (x coordinate of left peak, x coordinate of right peak)
return leftx_base, rightx_base
def overlay_lane_lines(self, plot=False):
"""
Overlay lane lines on the original frame
:param: Plot the lane lines if True
:return: Lane with overlay
"""
# Generate an image to draw the lane lines on
warp_zero = np.zeros_like(self.warped_frame).astype(np.uint8)
color_warp = np.dstack((warp_zero, warp_zero, warp_zero))
# Recast the x and y points into usable format for cv2.fillPoly()
pts_left = np.array([np.transpose(np.vstack([
self.left_fitx, self.ploty]))])
pts_right = np.array([np.flipud(np.transpose(np.vstack([
self.right_fitx, self.ploty])))])
pts = np.hstack((pts_left, pts_right))
# Draw lane on the warped blank image
cv2.fillPoly(color_warp, np.int_([pts]), (0,255, 0))
# Warp the blank back to original image space using inverse perspective
# matrix (Minv)
newwarp = cv2.warpPerspective(color_warp, self.inv_transformation_matrix, (
self.orig_frame.shape[
1], self.orig_frame.shape[0]))
# Combine the result with the original image
result = cv2.addWeighted(self.orig_frame, 1, newwarp, 0.3, 0)
if plot==True:
# Plot the figures
figure, (ax1, ax2) = plt.subplots(2,1) # 2 rows, 1 column
figure.set_size_inches(10, 10)
figure.tight_layout(pad=3.0)
ax1.imshow(cv2.cvtColor(self.orig_frame, cv2.COLOR_BGR2RGB))
ax2.imshow(cv2.cvtColor(result, cv2.COLOR_BGR2RGB))
ax1.set_title("Original Frame")
ax2.set_title("Original Frame With Lane Overlay")
plt.show()
return result
def perspective_transform(self, frame=None, plot=False):
"""
Perform the perspective transform.
:param: frame Current frame
:param: plot Plot the warped image if True
:return: Bird's eye view of the current lane
"""
if frame is None:
frame = self.lane_line_markings
# Calculate the transformation matrix
self.transformation_matrix = cv2.getPerspectiveTransform(
self.roi_points, self.desired_roi_points)
# Calculate the inverse transformation matrix
self.inv_transformation_matrix = cv2.getPerspectiveTransform(
self.desired_roi_points, self.roi_points)
# Perform the transform using the transformation matrix
self.warped_frame = cv2.warpPerspective(
frame, self.transformation_matrix, self.orig_image_size, flags=(
cv2.INTER_LINEAR))
# Convert image to binary
(thresh, binary_warped) = cv2.threshold(
self.warped_frame, 127, 255, cv2.THRESH_BINARY)
self.warped_frame = binary_warped
# Display the perspective transformed (i.e. warped) frame
if plot == True:
warped_copy = self.warped_frame.copy()
warped_plot = cv2.polylines(warped_copy, np.int32([
self.desired_roi_points]), True, (147,20,255), 3)
# Display the image
while(1):
cv2.imshow('Warped Image', warped_plot)
# Press any key to stop
if cv2.waitKey(0):
break
cv2.destroyAllWindows()
return self.warped_frame
def plot_roi(self, frame=None, plot=False):
"""
Plot the region of interest on an image.
:param: frame The current image frame
:param: plot Plot the roi image if True
"""
if plot == False:
return
if frame is None:
frame = self.orig_frame.copy()
# Overlay trapezoid on the frame
this_image = cv2.polylines(frame, np.int32([
self.roi_points]), True, (147,20,255), 3)
# Display the image
while(1):
cv2.imshow('ROI Image', this_image)
# Press any key to stop
if cv2.waitKey(0):
break
cv2.destroyAllWindows()
def main():
# Load a video
cap = cv2.VideoCapture(filename)
# Create a VideoWriter object so we can save the video output
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
result = cv2.VideoWriter(output_filename,
fourcc,
output_frames_per_second,
file_size)
# Process the video
while cap.isOpened():
# Capture one frame at a time
success, frame = cap.read()
# Do we have a video frame? If true, proceed.
if success:
# Resize the frame
width = int(frame.shape[1] * scale_ratio)
height = int(frame.shape[0] * scale_ratio)
frame = cv2.resize(frame, (width, height))
# Store the original frame
original_frame = frame.copy()
# Create a Lane object
lane_obj = Lane(orig_frame=original_frame)
# Perform thresholding to isolate lane lines
lane_line_markings = lane_obj.get_line_markings()
# Plot the region of interest on the image
lane_obj.plot_roi(plot=False)
# Perform the perspective transform to generate a bird's eye view
# If Plot == True, show image with new region of interest
warped_frame = lane_obj.perspective_transform(plot=False)
# Generate the image histogram to serve as a starting point
# for finding lane line pixels
histogram = lane_obj.calculate_histogram(plot=False)
# Find lane line pixels using the sliding window method
left_fit, right_fit = lane_obj.get_lane_line_indices_sliding_windows(
plot=False)
# Fill in the lane line
lane_obj.get_lane_line_previous_window(left_fit, right_fit, plot=False)
# Overlay lines on the original frame
frame_with_lane_lines = lane_obj.overlay_lane_lines(plot=False)
# Calculate lane line curvature (left and right lane lines)
lane_obj.calculate_curvature(print_to_terminal=False)
# Calculate center offset
lane_obj.calculate_car_position(print_to_terminal=False)
# Display curvature and center offset on image
frame_with_lane_lines2 = lane_obj.display_curvature_offset(
frame=frame_with_lane_lines, plot=False)
# Write the frame to the output video file
result.write(frame_with_lane_lines2)
# Display the frame
cv2.imshow("Frame", frame_with_lane_lines2)
# Display frame for X milliseconds and check if q key is pressed
# q == quit
if cv2.waitKey(25) & 0xFF == ord('q'):
break
# No more video frames left
else:
break
# Stop when the video is finished
cap.release()
# Release the video recording
result.release()
# Close all windows
cv2.destroyAllWindows()
main()
以上是关于OpenCV“迷雾”车道识别的反思的主要内容,如果未能解决你的问题,请参考以下文章