ROS2+Gazebo+OpenCV之mobot仿真视觉传感器
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2+Gazebo+OpenCV之mobot仿真视觉传感器相关的知识,希望对你有一定的参考价值。
之前介绍了使用笔记本或者USB摄像头的一些方法,比如获取图像然后再做简单处理。
预备基础:
其中:
使用机器人操作系统ROS 2和仿真软件Gazebo 9服务进阶实战(八)- mobot行驶至目标位置
当然,这些案例dashing/foxy/galactic/humble都是通用的。
如:ROS2之OpenCV怎么理解一段代码,一样。
只需修改一行代码即可实现:
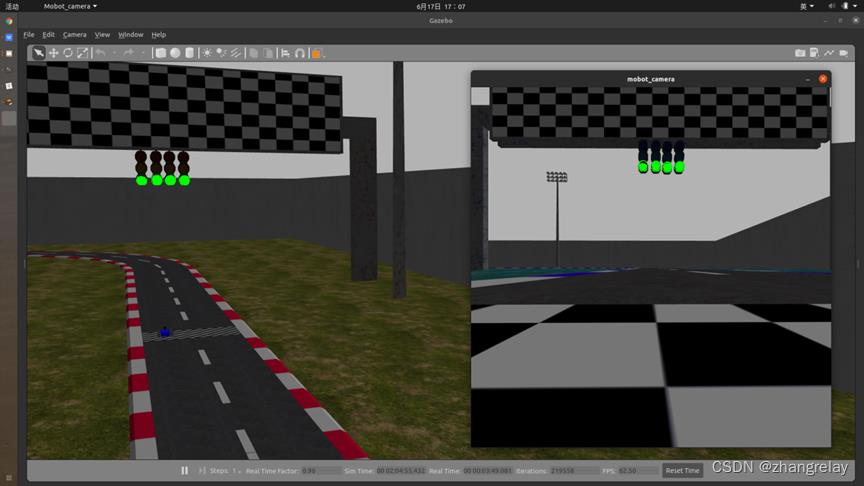
在这样环境中,可以做红绿等识别和赛道巡线等基础视觉教学任务。
已经测试三轮,在充分听取学生建议的基础上优化和改进,并全部公开。
提示:
图片右侧显示mobot_camera,参考:
参考python代码:
# Basic ROS 2 program to subscribe to real-time streaming
# video from your built-in webcam
# Author:
# - Addison Sears-Collins
# - https://automaticaddison.com
# Import the necessary libraries
import rclpy # Python library for ROS 2
from rclpy.node import Node # Handles the creation of nodes
from sensor_msgs.msg import Image # Image is the message type
from cv_bridge import CvBridge # Package to convert between ROS and OpenCV Images
import cv2 # OpenCV library
class ImageSubscriber(Node):
"""
Create an ImageSubscriber class, which is a subclass of the Node class.
"""
def __init__(self):
"""
Class constructor to set up the node
"""
# Initiate the Node class's constructor and give it a name
super().__init__('image_subscriber')
# Create the subscriber. This subscriber will receive an Image
# from the video_frames topic. The queue size is 10 messages.
self.subscription = self.create_subscription(
Image,
'video_frames',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
# Used to convert between ROS and OpenCV images
self.br = CvBridge()
def listener_callback(self, data):
"""
Callback function.
"""
# Display the message on the console
self.get_logger().info('Receiving video frame')
# Convert ROS Image message to OpenCV image
current_frame = self.br.imgmsg_to_cv2(data)
# Display image
cv2.imshow("camera", current_frame)
cv2.waitKey(1)
def main(args=None):
# Initialize the rclpy library
rclpy.init(args=args)
# Create the node
image_subscriber = ImageSubscriber()
# Spin the node so the callback function is called.
rclpy.spin(image_subscriber)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
image_subscriber.destroy_node()
# Shutdown the ROS client library for Python
rclpy.shutdown()
if __name__ == '__main__':
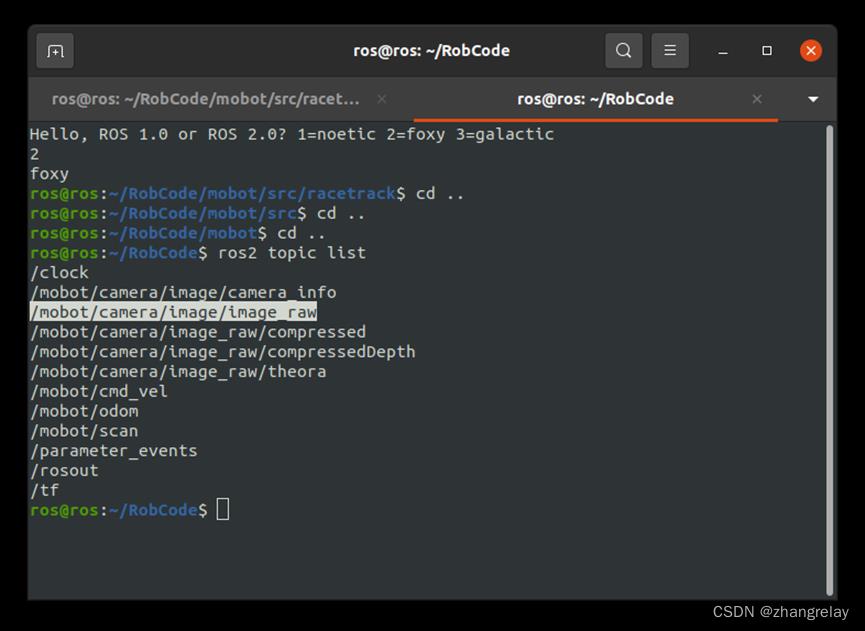
main()需要修改:
# from the video_frames topic. The queue size is 10 messages.
self.subscription = self.create_subscription(
Image,
'**********',
self.listener_callback,
10)频率为10hz,可修改为仿真虚拟传感器对应发布频率,*******修改为对应主题。
不重要的修改:
# Display image
cv2.imshow("camera", current_frame)部分调试过程截图:
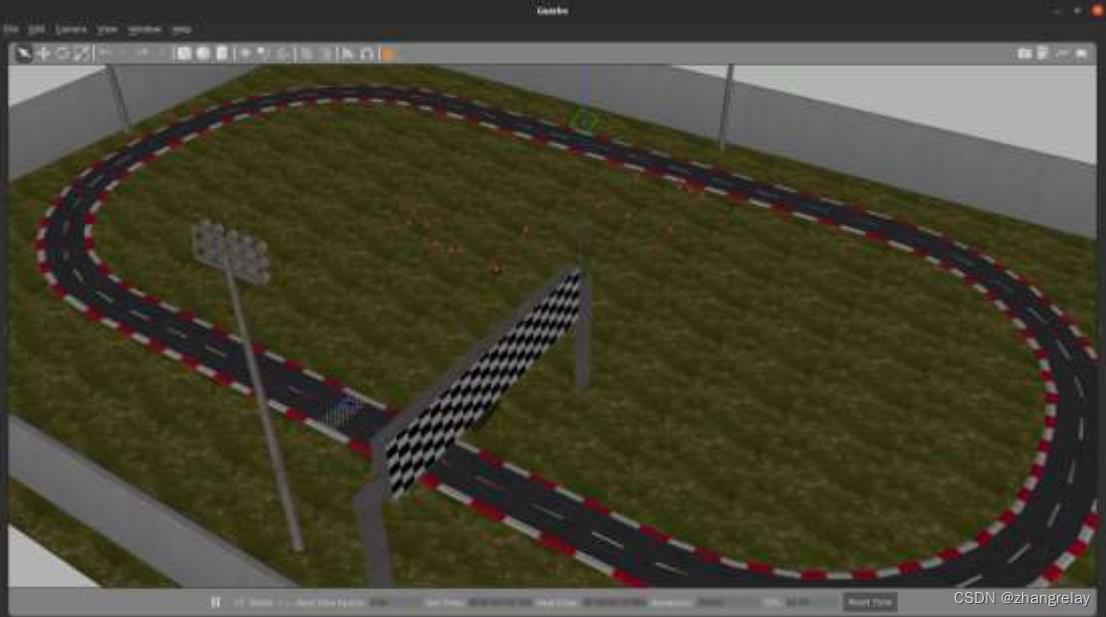
全景
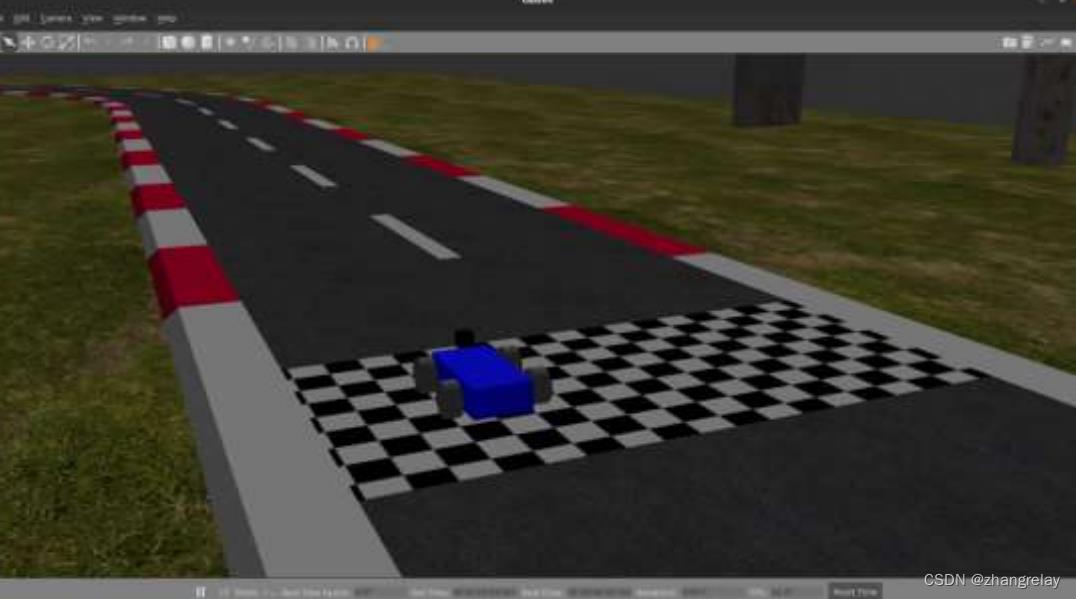
局部
部分版本接口函数不一致:
dashing+foxy一切ok。

需要修改,后续再补充。
 开发者涨薪指南
开发者涨薪指南
 48位大咖的思考法则、工作方式、逻辑体系
48位大咖的思考法则、工作方式、逻辑体系
以上是关于ROS2+Gazebo+OpenCV之mobot仿真视觉传感器的主要内容,如果未能解决你的问题,请参考以下文章