万能逼近基于自适应模糊控制技术的万能逼近原理以及自适应二阶滤波器对AUV五个自由度的外界不规则干扰进行估计和补偿simulink仿真
Posted fpga&matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了万能逼近基于自适应模糊控制技术的万能逼近原理以及自适应二阶滤波器对AUV五个自由度的外界不规则干扰进行估计和补偿simulink仿真相关的知识,希望对你有一定的参考价值。
1.软件版本
matlab2017b
2.本算法理论知识
自适应二阶滤波器,大概的原理如下所示:
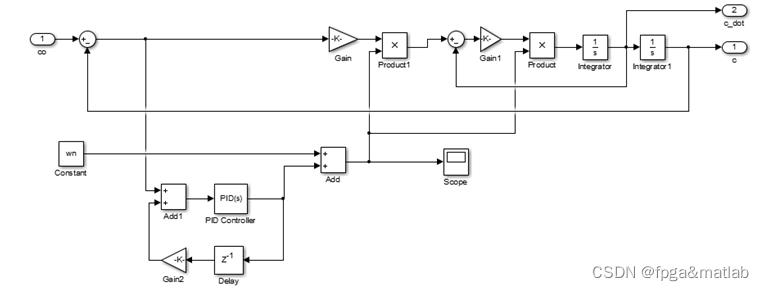
在原来的基础上,对wn参数进行自适应更新
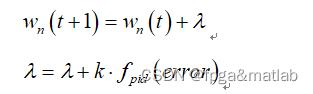
即,更新wn参数,wn的更新由滤波器的误差,通过PID将误差进行平滑处理,然后平滑处理后的数据进行累加,得到wn的更新分量。
自适应模糊控制技术中的万能逼近原理:
这里对干扰进行估计和补偿,目的是消除五个自由度上的干扰,而这自由度的输出本质是控制输出,这里采用PID控制器原理,通过自适应模糊PID控制的方式,抑制干扰, 起到补偿的作用。
大概的结构可以设计成如下结构:
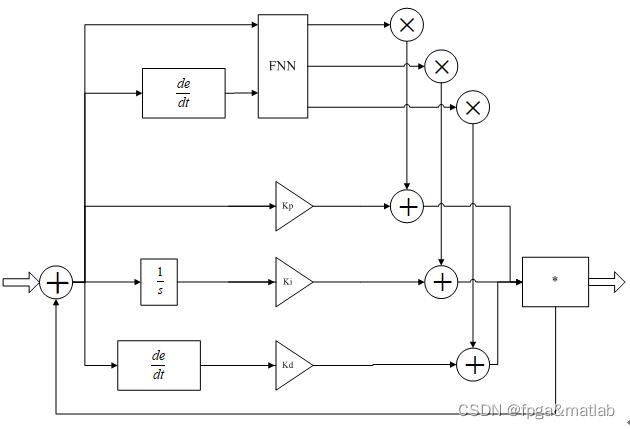
通过该结构,可以起到干扰抑制的功能。
控制规则的基本形式为:

建立模糊控制规则表的基本原则是:当误差大或较大时,选取控制量以尽快消除误差为主;而当误差较小时,选取控制量要注意防止超调,以系统的稳定性为主要出发点。
根据这个规则,模糊规则表如下所示:
表1 模糊控制规则表
| E | EC | KP | KI | KD | |
| 01 | NB | NB | PB | NB | PS |
| 02 | NB | NM | PB | NB | NS |
| 03 | NB | NS | PM | NM | NB |
| 04 | NB | ZO | PM | NM | NB |
| 05 | NB | PS | PS | NS | NB |
| 06 | NB | PM | ZO | ZO | NM |
| 07 | NB | PB | ZO | ZO | PS |
| 08 | NM | NB | PB | NB | PS |
| 09 | NM | NM | PB | NB | NS |
| 10 | NM | NS | PM | NM | NB |
| 11 | NM | ZO | PS | NS | NM |
| 12 | NM | PS | PS | NS | NM |
| 13 | NM | PM | ZO | ZO | NS |
| 14 | NM | PB | NS | ZO | ZO |
| 15 | NS | NB | PM | NB | ZO |
| 16 | NS | NM | PM | NM | NS |
| 17 | NS | NS | PM | NS | NM |
| 18 | NS | ZO | PS | NS | NM |
| 19 | NS | PS | ZO | ZO | NS |
| 20 | NS | PM | NS | PS | NS |
| 21 | NS | PB | NS | PS | ZO |
| 22 | ZO | NB | PM | NM | ZO |
| 23 | ZO | NM | PM | NM | NS |
| 24 | ZO | NS | PS | NS | NS |
| 25 | ZO | ZO | ZO | ZO | NS |
| 26 | ZO | PS | NS | PS | NS |
| 27 | ZO | PM | NM | PM | NS |
| 28 | ZO | PB | NM | PM | ZO |
| 29 | PS | NB | PS | NM | ZO |
| 30 | PS | NM | PS | NS | ZO |
| 31 | PS | NS | ZO | ZO | ZO |
| 32 | PS | ZO | NS | PS | ZO |
| 33 | PS | PS | NS | PS | ZO |
| 34 | PS | PM | NM | PM | ZO |
| 35 | PS | PB | NM | PB | ZO |
| 36 | PM | NB | PS | ZO | PB |
| 37 | PM | NM | ZO | ZO | NS |
| 38 | PM | NS | NS | PS | PS |
| 39 | PM | ZO | NM | PM | PS |
| 40 | PM | PS | NM | PM | PS |
| 41 | PM | PM | NM | PB | PS |
| 42 | PM | PB | NB | PB | PB |
| 43 | PB | NB | ZO | ZO | PB |
| 44 | PB | NM | ZO | ZO | PM |
| 45 | PB | NS | NM | PS | PM |
| 46 | PB | ZO | NM | PM | PM |
| 47 | PB | PS | NM | PM | PS |
| 48 | PB | PM | NB | PB | PS |
| 49 | PB | PB | NB | PB | PB |
隶属函数
使用高斯函数来描述控制活动时的模糊过程是合理的,所以本文所采用的高斯模隶属函数的表达式如下所示:

自适应模糊技术
这里,采用基于神经网络的自适应模糊控制技术,大致的原理如下所示:
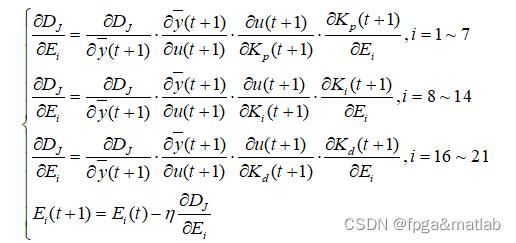
在模糊神经网络中,首先定义学习目标函数:

对于每个训练数据集合从输入节点开始,使用前向传播的方法计算网络中所有节点的激活程度,然后从输出节点开始,使用反向传播的方法计算所有隐节点的。
这里所使用的学习规则是:
 (2)
(2)
通过规则提取后,那么第三层和第四层剩下的第i个输出值与第j条规则间的连接强度的修正如下:


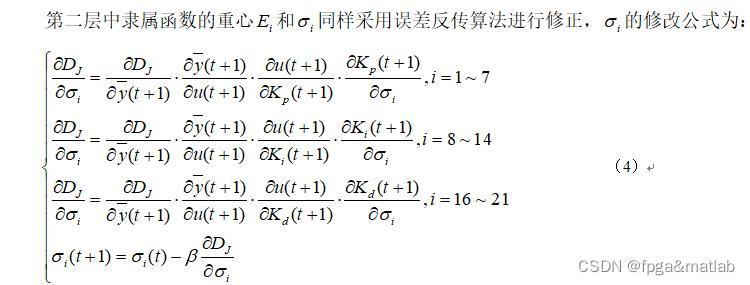
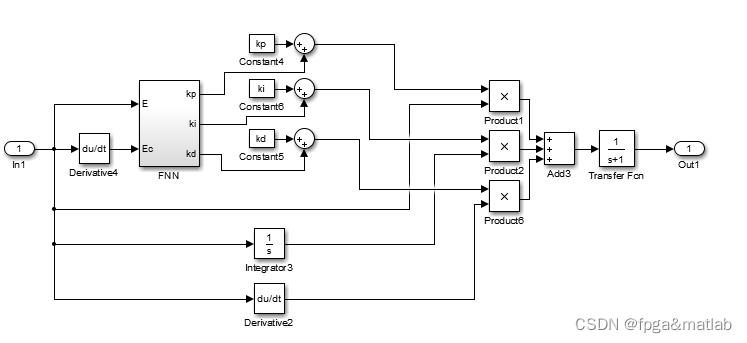
根据上述原理,构建如下的自适应模糊控制器结构:
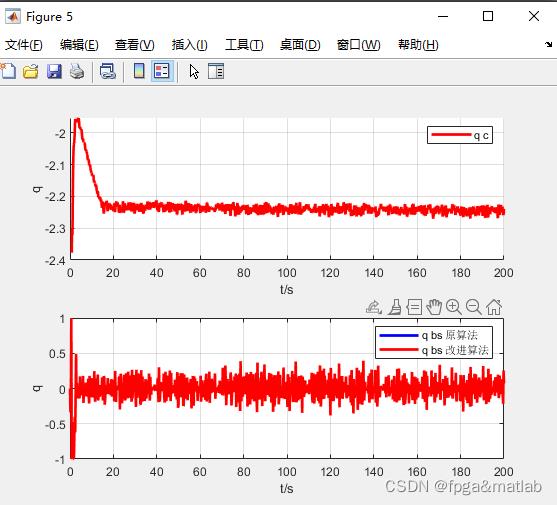
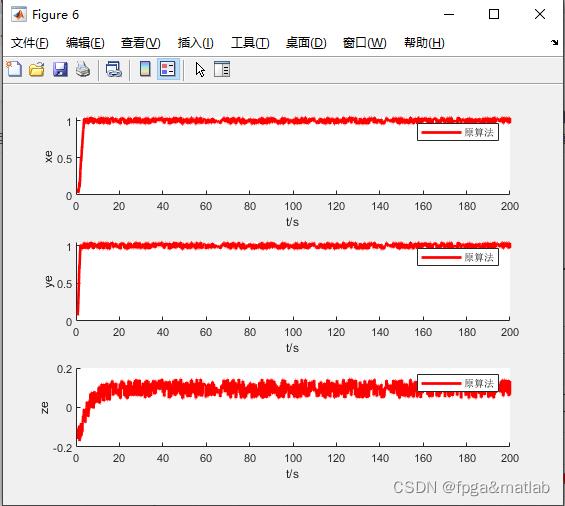
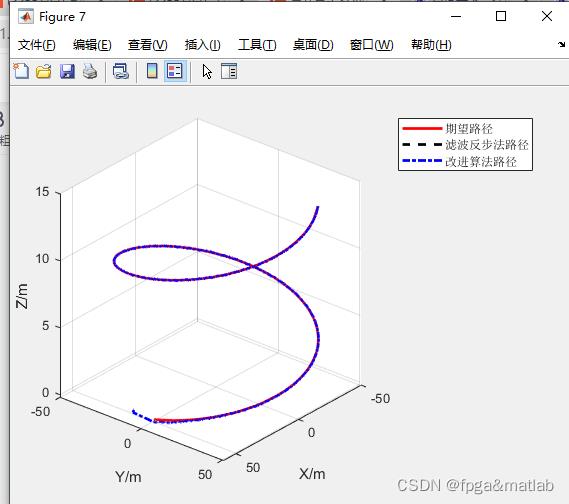
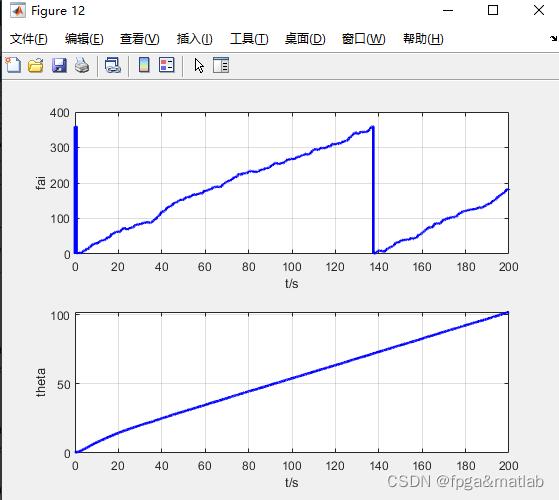
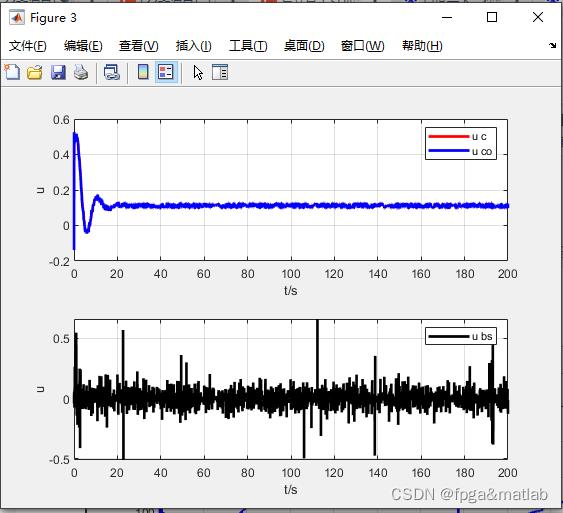
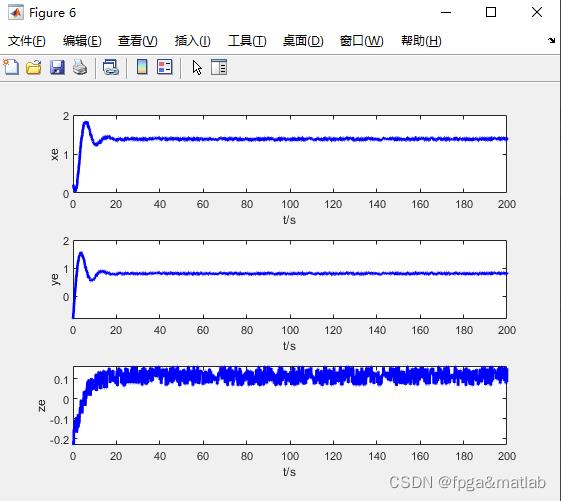
3.仿真结论
4.参考文献
[1]陈子印. 欠驱动无人水下航行器三维路径跟踪反步控制方法研究[D]. 哈尔滨工程大学, 2013.A08-76
以上是关于万能逼近基于自适应模糊控制技术的万能逼近原理以及自适应二阶滤波器对AUV五个自由度的外界不规则干扰进行估计和补偿simulink仿真的主要内容,如果未能解决你的问题,请参考以下文章