机器视觉 + HALCON - 卡尺1D测量原理
Posted 子韵如初
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器视觉 + HALCON - 卡尺1D测量原理相关的知识,希望对你有一定的参考价值。
相比于计算机视觉领域使用深度学习方法而言,传统视觉方法虽然学习与编码成本很高,但是相较之下更为靠谱,每个操作都是可解释,可复现的。对于一些精度要求较高,样本很少且检测场景比较单一模板化的任务,使用传统视觉方法是非常有效的
本文简单介绍一下HALCON中1D卡尺测量原理,该部分也是传统视觉方法中最基础也是最重要的算法
 https://www.mvtec.com/products/halcon/documentation
https://www.mvtec.com/products/halcon/documentation世界坐标是HALCON自身定义的参考坐标,可以把它定义在任何位置,然后其他对象都会基于该坐标系设置坐标。
1D边缘检测
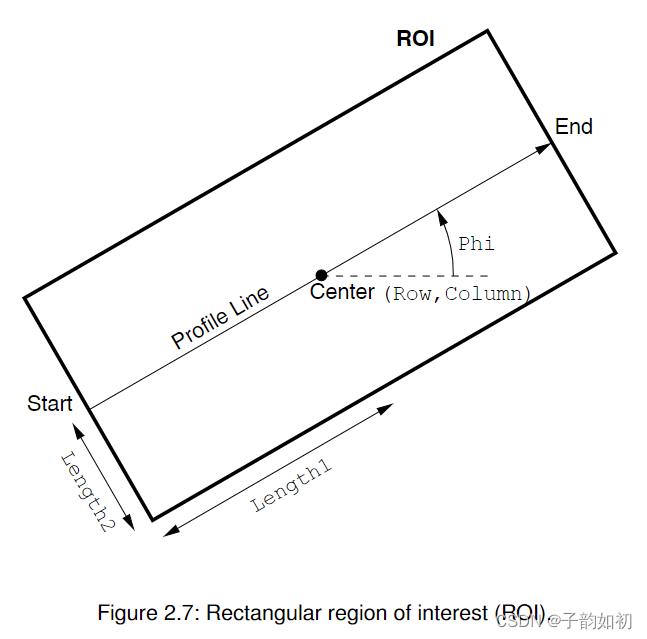
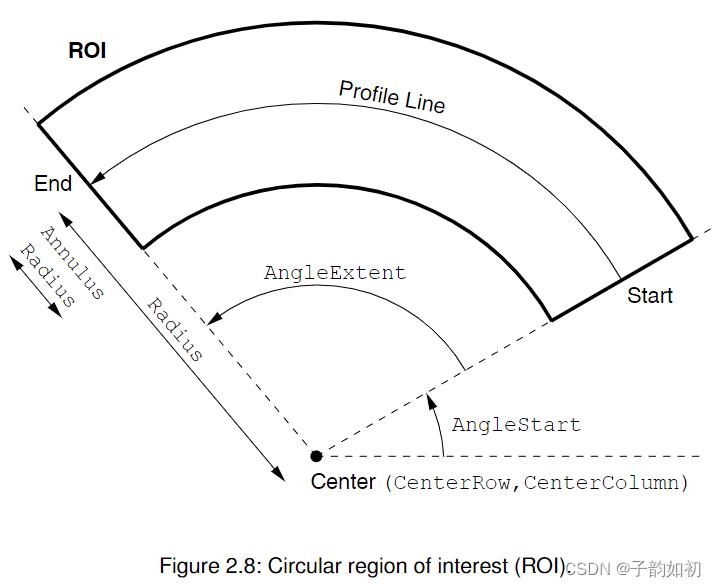
首先用户需要自定义一个ROI(矩形、圆弧)在图中的位置,HALCON会建立等距的投影线垂直于测量线或弧线(也称为profile line),其长度等于 ROI 的宽度
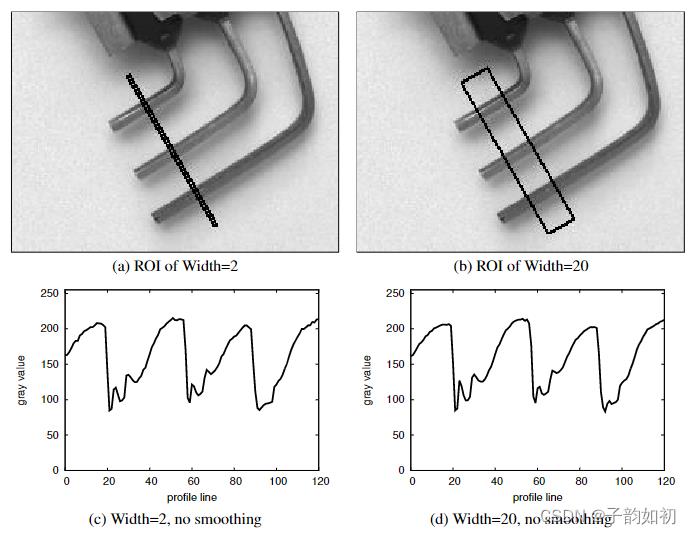
然后,计算沿每条投影线的平均灰度值。 这些平均值的序列称为profile,其实也就是profile line上每一个点的值等于竖着的投影线上的平均灰度值。 如果投影线不是水平或垂直定向的,则必须对沿它们的像素值进行插值,比如bilinear、nearest_neighbor、bicubic。其中nearest最快,但精度很低,bicubic慢但是精度高
如图可以看到更宽的ROI得到的profile line噪声更少,不过如果需要测量的边缘不垂直于profile line,那么则必须选择较小的 ROI 宽度用于检测边缘
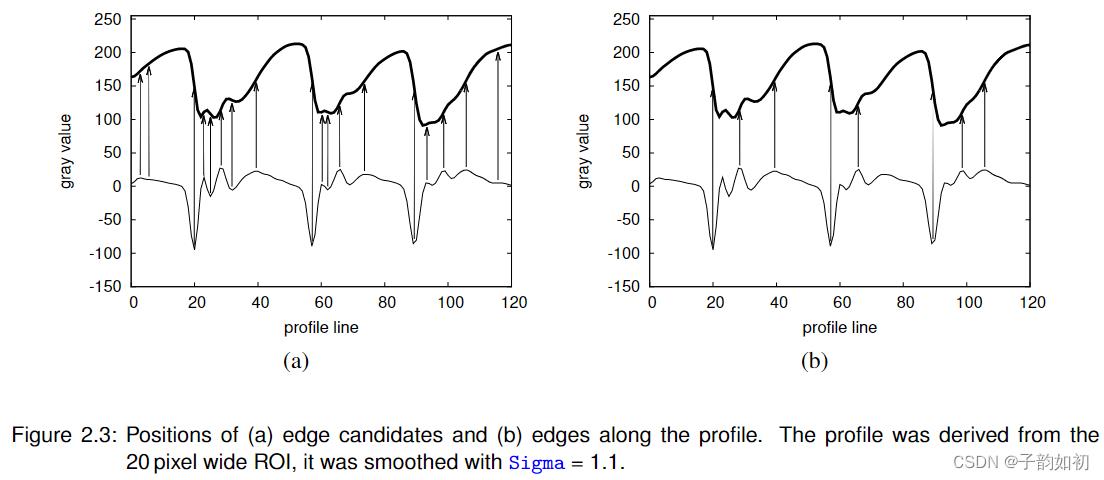
如下图,用高斯平滑滤波器对profile line进行平滑(图中的粗线),其中sigma取值越大,平滑效果越强,图像越平缓

细线则代表对应的导数,导数出现极值点的位置越有可能是边缘,直观上来说相邻的两块像素灰度值变化很大,则可以认为他们是边缘点,我们就可以通过设置threshold来截取边缘位置
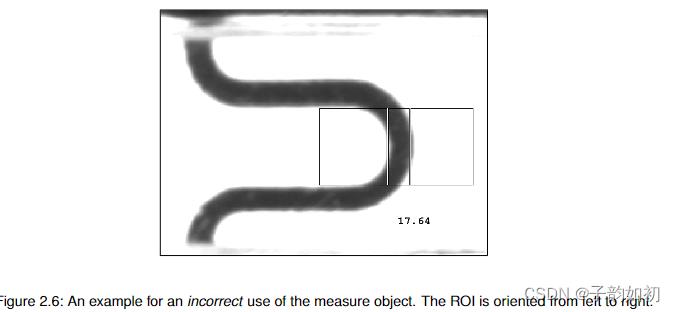
值得注意的是,这种方法不适合测量例如弯曲边缘的位置。因为灰度值边缘与不会与profile line的交点重合。这种情况需要采用arc弧线用于检测
可视化检测结果
根据profile line上的6个波动点我们就能够得到6个可能是边缘的1D位置
gen_measure_rectangle2 (Row, Column, Phi, Length1, Length2, Width, Height, \\
Interpolation, MeasureHandle)
但是根据结果可以看到,第三个边缘其实是我们不需要的,因此我们需要设置1D测量的过度策略
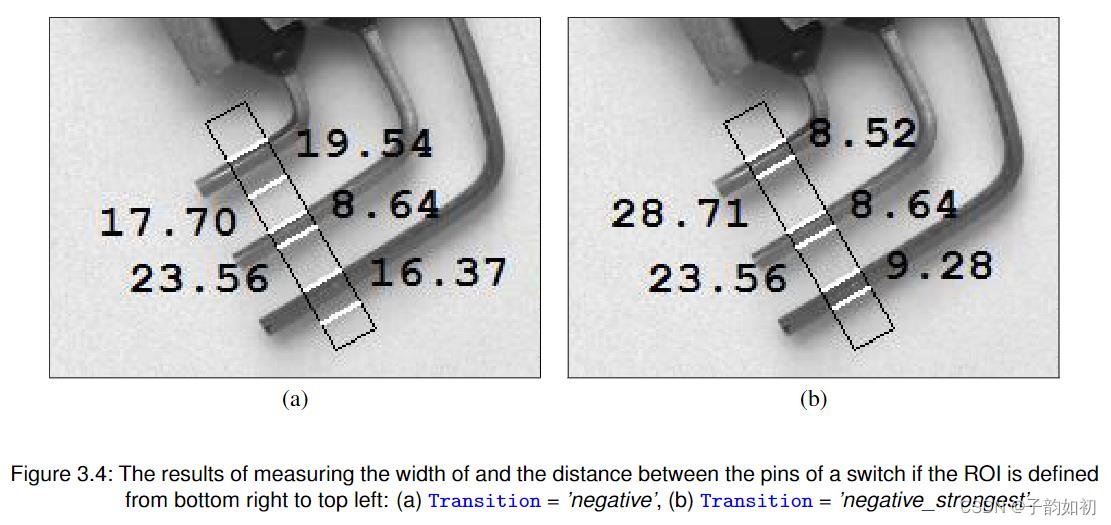
Transition配置,同时都可以添加_strongest选择变化最强的边。如果找到具有相同转换的多于一个的连续边缘,则将第一个边缘作为pair。但是这样可能会导致在阈值不是足够高的情况下,出现连续边缘间隔较远的情况(如图a)。对于这种情况,可以仅选择一个具有连续上升沿和下降沿的序列上的相应的最强边缘。例如“negative_strongest”。
- negative 只返回从亮到暗的边 也就是去掉了左上角往下的第二根线
- positive 只返回从暗到亮的边
- all 返回所有的边
以上是关于机器视觉 + HALCON - 卡尺1D测量原理的主要内容,如果未能解决你的问题,请参考以下文章