视觉SLAM 关键技术与发展概述
Posted 一颗小树x
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了视觉SLAM 关键技术与发展概述相关的知识,希望对你有一定的参考价值。
前言
最近看了北京理工大学的课程《智能车辆概述与应用》,感觉入门角度讲的还不错的,于是通过本文记录关键内容。
背景
随着计算机视觉的发展,视觉在定位导航中的得到应用;其中相关技术包括视觉里程计VO、视觉SLAM。
视觉里程计VO:关注两帧图像之间的位姿关系;一般不存储历史数据,只对当前或局部帧之间的位姿关系;往往忽视全局的一致性;运算速度快。
视觉SLAM:计算当前帧(或局部帧) 和 具有历史数据地图 的位姿关系。维持全局的一致性,保持定位精度。
视觉里程计可以看作是视觉SLAM的一部分(前端部分)。
目录
一、视觉SLAM关键技术
视觉SLAM框架如下图所示:
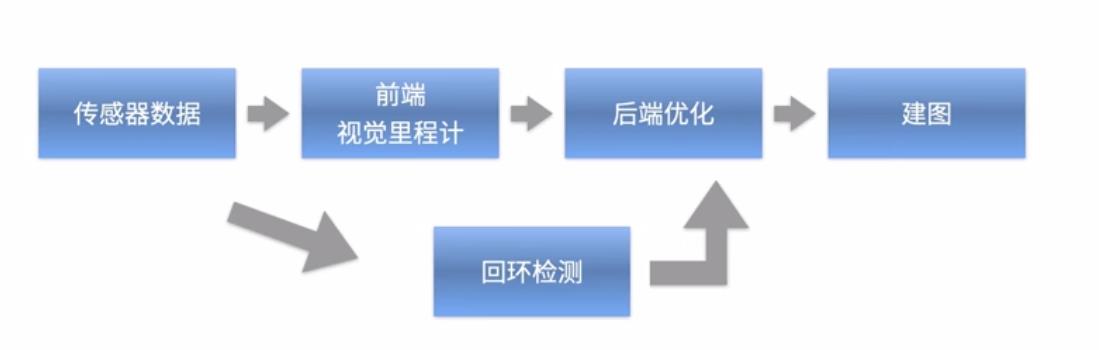
1.1 传感器数据
这部分主要是输入摄像头的图像数据;根据不同的视觉SLAM模型,输入的摄像头类型有:单目摄像头、或双目摄像头、或RGB-D摄像头等等。
1.2 前端 视觉里程计
视觉里程计(Visual Odometry),简称VO。这部分主要是计算图像帧之间 的相机位姿关系(相对位置关系)。通过拍摄图像,估计出相机的运行位置和姿态信息。
分类:单目视觉里程计、立体视觉里程计;
单目视觉里程计:往往无法估计深度信息,存在尺度歧义问题。
立体视觉里程计:能计算深度信息,不存在尺度歧义问题。而且,立体视觉能提供更丰富的数据,轨迹预测更准确。
关键技术:特征提取、特征匹配、运动估计。步骤流程图,如下所示:收集输入图像数据,然后进行特征提取、特征匹配、运动估计,最后进局部行优化。

A)特征提取
特征提取:提取图像中的特征点。特征点由关键点和描述子两部分组成。
那什么是图像中的关键点啊?是指特征点在图像里的位置、大小、朝向等信息。
那什么是图像中的描述子啊?描述该关键点 周围像素的信息,人为设定的,通常是一个向量。比如,两个相似的特征点,它们的描述子应该一样。
为什么通常是用向量表示描述子啊?两个特征点在向量空间距离相近,可以认为是相同的描述子,进而表示两个特征点相似。
A.1)关键点
通常提取图像的角点作为关键点;通过一个小的窗口,观察灰度的变化,来识别角点。往任意方向移动,引起灰度的变化,这往往是角点。角点的检测如下图所示:

常见的角点检测算法:FAST角点(如下图所示)、oFAST角点、sFAST角点(详细的后面文章再讲解)
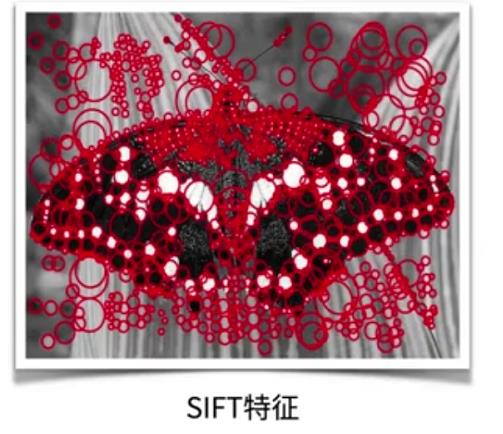
A.2)描述子
常见的描述子有SIFI特征(尺度不变特征转换),对DoG(Difference of Gaussians,高斯差)特征点p进行筛选得到关键点。
为每个关键点分配方向,使其具有旋转不变性。
对关键点的高斯邻域计算梯度值决定主方向和辅方向。归一化到单位长度,减小对光照的敏感。
常见的描述子还有BRIEF(二值鲁棒独立元素特征),它是一种二进制的描述子,描述向量由许多个0和1组成。以特征点P为中心,把s*s大小的领域中,每个点对应的像素灰度值 与 特征点中心P进行比较,最后得到BRIEF描述子。

A.3)特征提取 示例——ORB特征
ORB特征(Oriented FAST and Rotated BRIEF),采用BRIEF描述子,步骤流程如下图所示:

B)特征匹配
特征匹配的目的是解决SLAM中的数据关联问题,即:确定当前的特征点 与 之前看到的特征点 之间的一个对应关系。下图是两张图像,通过特征匹配,找到一一对应的特征点。

经典示例:立体匹配,详细请参考:一篇文章认识《双目立体视觉》_一颗小树x的博客-CSDN博客
C)运动估计
运动估计是对相邻两帧图像的运动变化做出估计,从而得到整体的运动轨迹和当前的运动状态。在得到对应的特征点后,可以计算帧间的相对运动(运动估计)。
2D-2D运动估计:两帧图像之间进行运动估计,在待计算的两帧图像的特征点,都用2维图像坐标表示。(求旋转矩阵R、平移向量t、奇异值分解法)
3D-3D运动估计:两帧图像之间进行运动估计,在待计算的两帧图像的特征点,都用3维坐标表示。(ICP、NDT算法)
3D-2D运动估计:两帧图像之间进行运动估计,在待计算的两帧图像的特征点,前一张用3维坐标表示,后用2维图像坐标表示。(在坐标转换过程中,需要计算最小重投影误差,PnP算法解决)
后面文章再详细讲解。。。
1.3 后端 优化
这部分主要是对前端(视觉里程计)的输出结果进行误差消除和优化,得到更优的位姿估计信息。
后端优化主要是消除SLAM的噪声,包括传感器的测量误差、标定误差、特征点位置误差等。为了尽量消除这些误差的影响,需对前端得到的位置姿态和地图路标位置进行优化。
通常采用光束法平差(Bundle Adjustment,BA)的方法来调整关键帧的位置,使其达到最优。BA算法可以搭配G2O开源库使用。
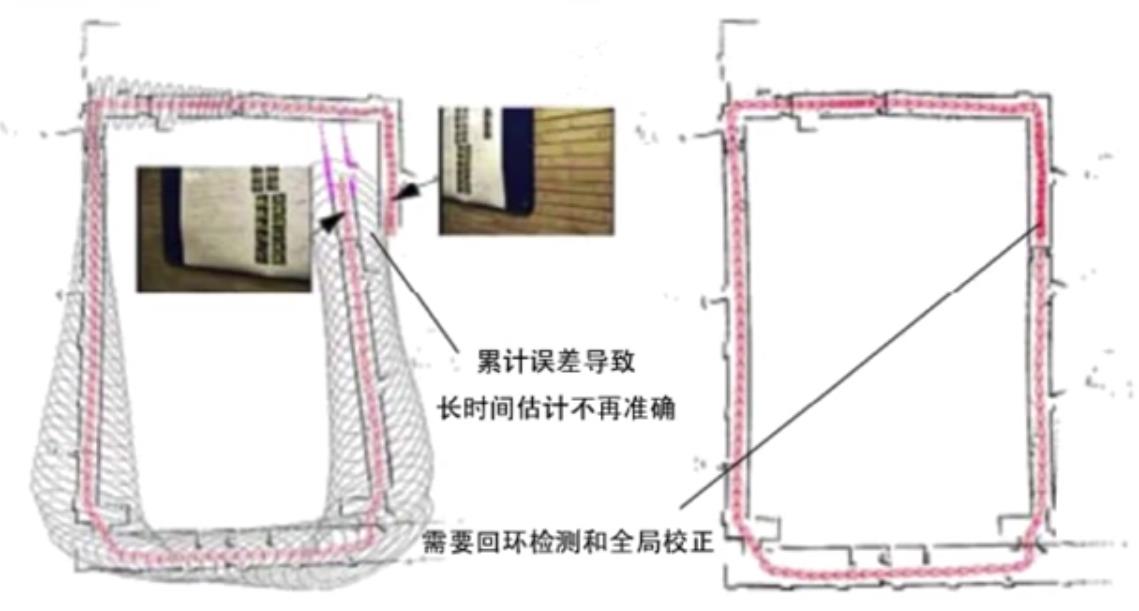
1.4 回环检测
这部分主要是能识别出,摄像机之前经过的场景,从而构建回环;解决位置漂移的问题,让计算机理解环境的拓扑结构。
1.5 建图
这部分主要是通过特征点进行对环境信息建图。后面补充更新..........
二、视觉SLAM发展概述
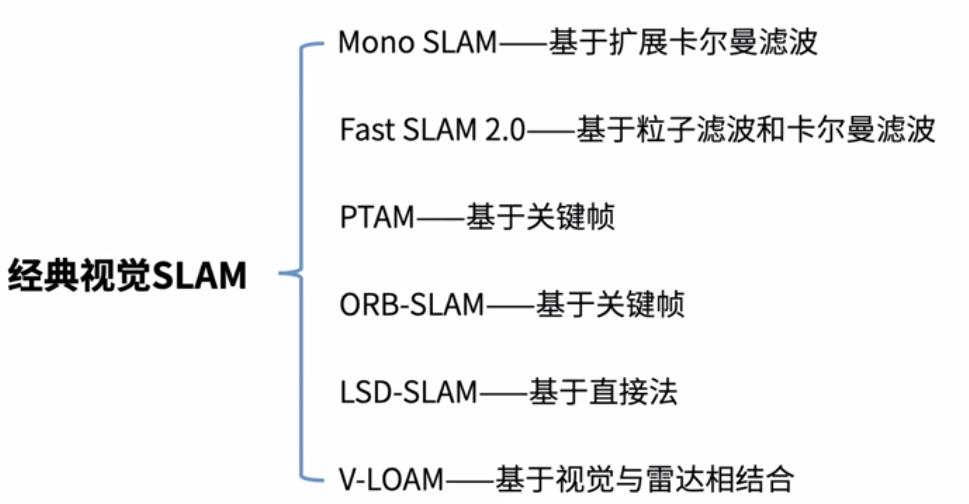
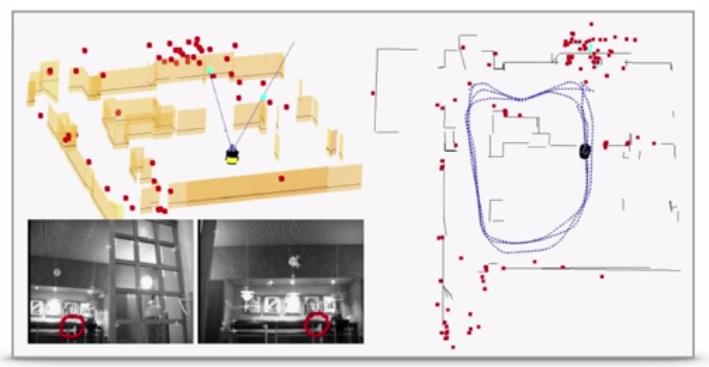
2.1 Mono SLAM一基于扩展卡尔曼滤波
Mono SLAM是第一个实时的单目视觉SLAM系统,以扩展卡尔曼滤波EKF为后端,追踪前端非常稀疏的特征点。Mono SLAM 已相机的当前状态和所有路标点为状态量,更新它的均值和协方差。
基于扩展卡尔曼滤波的视觉SLAM,通过非线性系统状态方程的一阶偏导 来近似运动模型。它忽略了泰勒展开的高阶项,这样不可避免地引入线性误差,因此只有状态方程接近线性时,才能使用扩展卡尔曼滤波。在扩展卡尔曼滤波中,每个特征点的位置服从高斯分布。
2.2 FastSLAM2.0一基于粒子滤波和卡尔曼滤波
使用粒子滤波和卡尔曼滤波做出了FastSLAM,将SLAM问题分解为定位问题和基于位姿估计的路标集合估计问题,后来又经过改进,提出了FastSLAM2.0.
2.3 PTAM一基于关键帧
PTAM提出并实现了跟踪与建图过程的双线程并行化。使用非线性优化作为后端。
引入了关键顿机制:不必精细地处理每一幅图像,而是把几个关键图像串起来,然后优化其轨迹和地图。
只是应用于小场景,并没有在大范围环境中进行测试。
2.4 ORB-SLAM一基于关键帧
它使用三个线程完成SLAM
- 实时跟踪特征点的Tracking线程;
- 局部Bundle Adjustmente的建图优化线程;
- 全局Pose Graph的回环检测与优化线程。

ORB-SLAM特点:
- 支持单目、双目、RGB-D三种模式;
- 采用ORB特征,用时短,可实时计算;
- 具有良好的旋转和缩放不变性;
- 提供描述子,大范围运动时也能进行回环检测和重定位。
2.5 LSD-SLAM一基于直接法
·LSD-SLAM的核心贡献是将直接法应用到了半稠密的单目SLAM中。优点:
- LSD-SLAM的直接法是针对像素进行的。
- LSD-SLAM在CPU上实现了半稠密场景的重建。
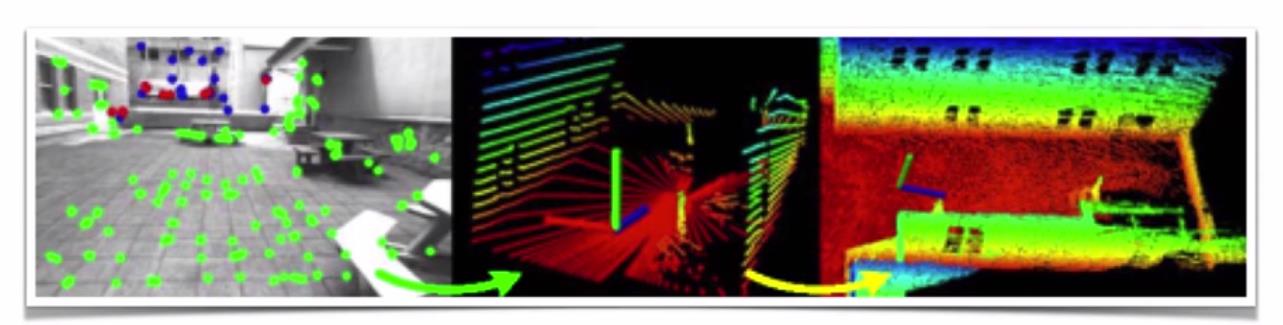
2.6 V-LOAM一基于视觉与雷达相结合
使用视觉里程计方法来对自身运动进行估计,并对雷达点进行匹配;利用基于雷达的里程计方法进一步对定位和地图进行优化;同时利用相机和雷达的优势,提高了定位和建图的准确性与稳定性。
本文只供大家参加与学习,谢谢!
 创作打卡挑战赛
创作打卡挑战赛
 赢取流量/现金/CSDN周边激励大奖
赢取流量/现金/CSDN周边激励大奖
以上是关于视觉SLAM 关键技术与发展概述的主要内容,如果未能解决你的问题,请参考以下文章