液位系统建模与控制策略仿真研究
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了液位系统建模与控制策略仿真研究相关的知识,希望对你有一定的参考价值。
主要研究内容:
1、以双容水箱系统为被控对象,建立液位系统的模型。
2、利用Simulink工具,研究分析双容水箱液位控制系统的控制策略,并进行仿真。
3、控制方法调试,并观察控制效果。
目标和要求:
以双容水箱液位系统为被控对象,进行模型的建立,利用Simulink工具,研究双容水箱液位控制系统的先进控制策略,如模糊PID、神经网络PID,分析仿真结果并比较各方法的控制效果。
参考论文有:
0000从模糊控制的数学本质看模糊逻辑的成功_关于_省略_于模糊逻辑似是而非的争论_的似.pdf
000Fuzzy控制的本质与一类高精度Fuzzy控制器的设计.pdf
15年基于参数自整定的模糊PID控制在多容水箱系统中的应用_孙雷.caj
16年基于模糊PID双容水箱控制系统研究与应用_郑敏.caj
模糊控制器与PID调节器的关系.pdf
模糊控制在液位控制器中的应用.pdf
代码:
clear
clc
close all
num1 = [5.2];
den1 = [163 1];
num2 = [7.1];
den2 = [227 1];
delay = 85;
lim = 100;
tend = 4000;
% sys = tf()
% sys = tf(num,den,'inputdelay',delay)
%阶跃响应
% step(sys)
tstep =0.5;
my_options=simset('FixedStep',tstep,'Solver','ode15');
sim('single_loop.slx',[0 tend],my_options);
t1 = tout;
y1 = yout;
figure(1)
plot(tout,yout)
xlabel 时间/s
ylabel 液位/cm
title 单闭环模型
sim('double_loop.slx',[0 tend],my_options);
t2 = tout;
y2 = yout;
figure(2)
plot(tout,yout)
xlabel 时间/s
ylabel 液位/cm
title 双闭环模型
sim('model.slx',[0 tend],my_options);
t3 = tout;
y3 = yout;
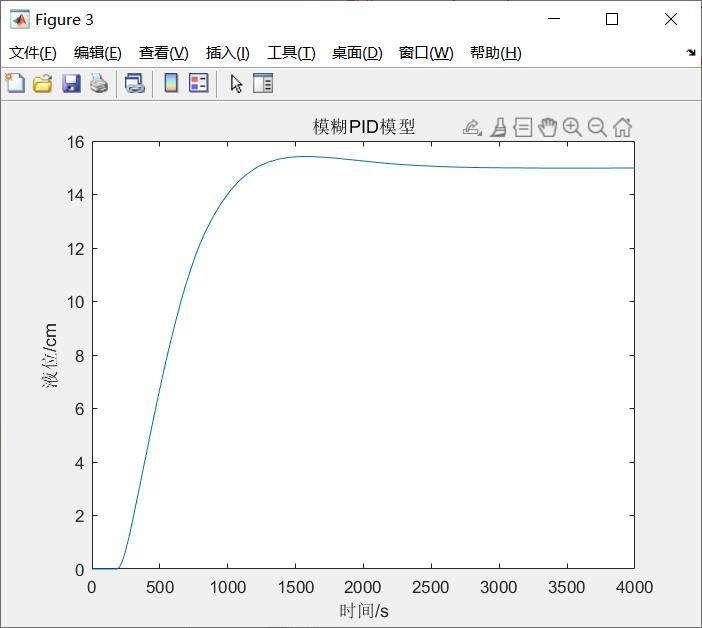
figure(3)
plot(tout,yout)
xlabel 时间/s
ylabel 液位/cm
title 模糊PID模型
figure(4)
plot(t1,y1,t2,y2,t3,y3)
xlabel 时间/s
ylabel 液位/cm
title 三种控制模型比较
legend('单闭环模型','双闭环模型','模糊PID模型')
结果:
以上是关于液位系统建模与控制策略仿真研究的主要内容,如果未能解决你的问题,请参考以下文章