URDF机器人模型ROS1&2案例(noetic+galactic)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了URDF机器人模型ROS1&2案例(noetic+galactic)相关的知识,希望对你有一定的参考价值。
URDF机器人模型ROS1&2案例_zhangrelay的专栏-CSDN博客
ROS机器人URDF建模_zhangrelay的专栏-CSDN博客
如上两篇博客所涉及案例,如下:
zhangrelay / urdf_tutorial · GitCode
为啥不使用github……
主要是方便学生朋友使用,网络稳定且快速
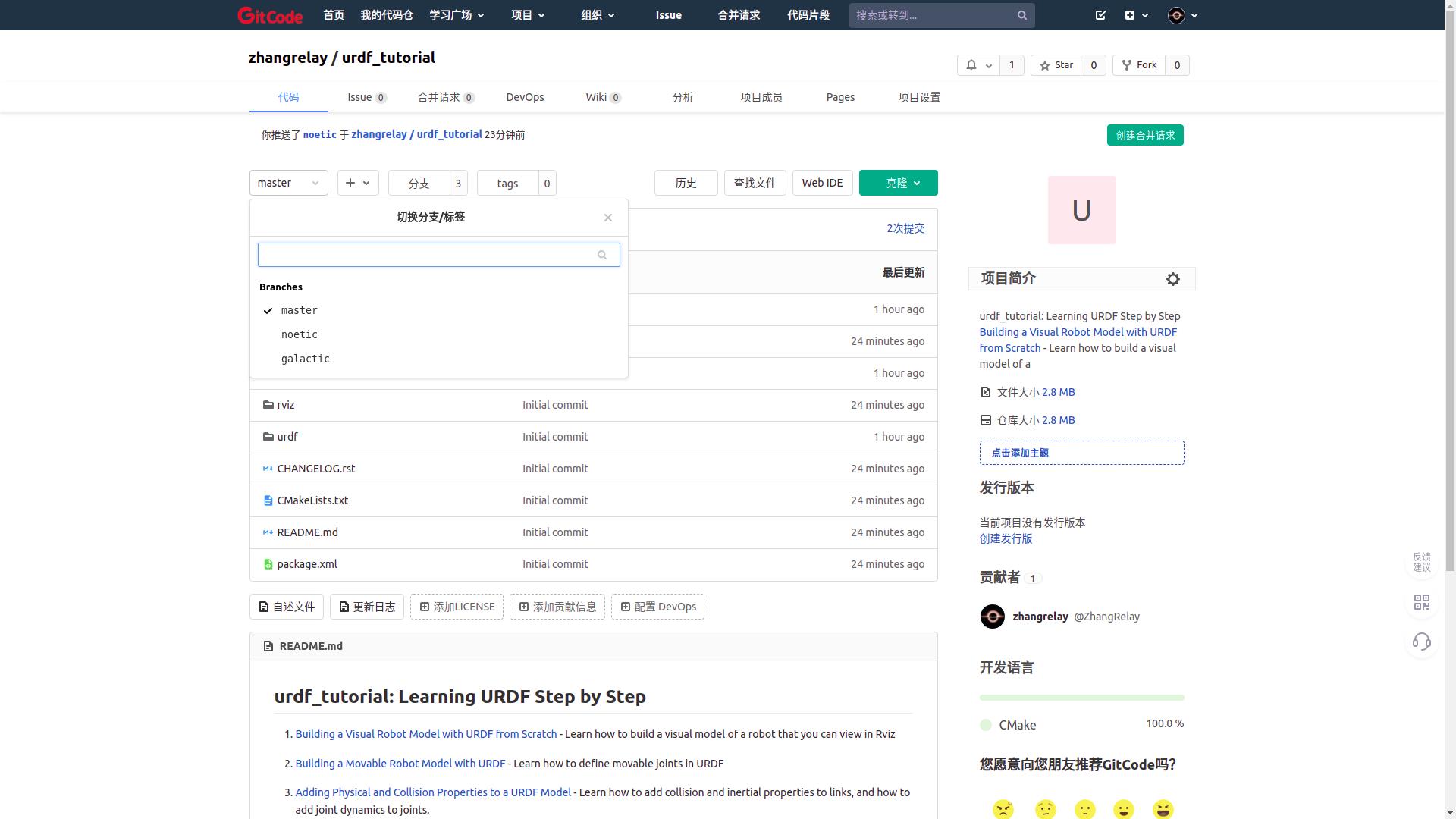
- ros1 :master/noetic
- ros2 : galactic
请注意分支选择,不要搞错了。
- ros1编译使用catkin;
- ros2编译使用colcon。
除了官方案例,还加入了三个简单机器人模型:
.
├── CHANGELOG.rst
├── CMakeLists.txt
├── images
│ ├── flexible.png
│ ├── materials.png
│ ├── multipleshapes.png
│ ├── myfirst.png
│ ├── origins.png
│ └── visual.png
├── launch
│ └── display.launch
├── meshes
│ ├── base_link.STL
│ ├── belt.dae
│ ├── body3.dae
│ ├── flw2.dae
│ ├── head_screen.dae
│ ├── left_belt.dae
│ ├── l_finger_color.tif
│ ├── l_finger.dae
│ ├── l_finger_tip_color.tif
│ ├── l_finger_tip.dae
│ ├── lift3.dae
│ ├── link_1.dae
│ ├── link_1.STL
│ ├── link_2.dae
│ ├── link_2.STL
│ ├── link_3.STL
│ ├── link_4.STL
│ ├── link_5.dae
│ ├── link_5.STL
│ ├── link_6.STL
│ ├── link_7.STL
│ ├── right_belt.dae
│ ├── rlw2.dae
│ ├── trackbase_left.dae
│ └── trackbase_right.dae
├── package.xml
├── README.md
├── rviz
│ ├── urdf.rviz
│ └── urdf.vcg
└── urdf
├── 01-myfirst.urdf
├── 02-multipleshapes.urdf
├── 03-origins.urdf
├── 04-materials.urdf
├── 05-visual.urdf
├── 06-flexible.urdf
├── 07-physics.urdf
├── 08-macroed.urdf.xacro
├── cozmo2.urdf
├── magician.urdf
└── robot1_base1.urdf
5 directories, 49 files
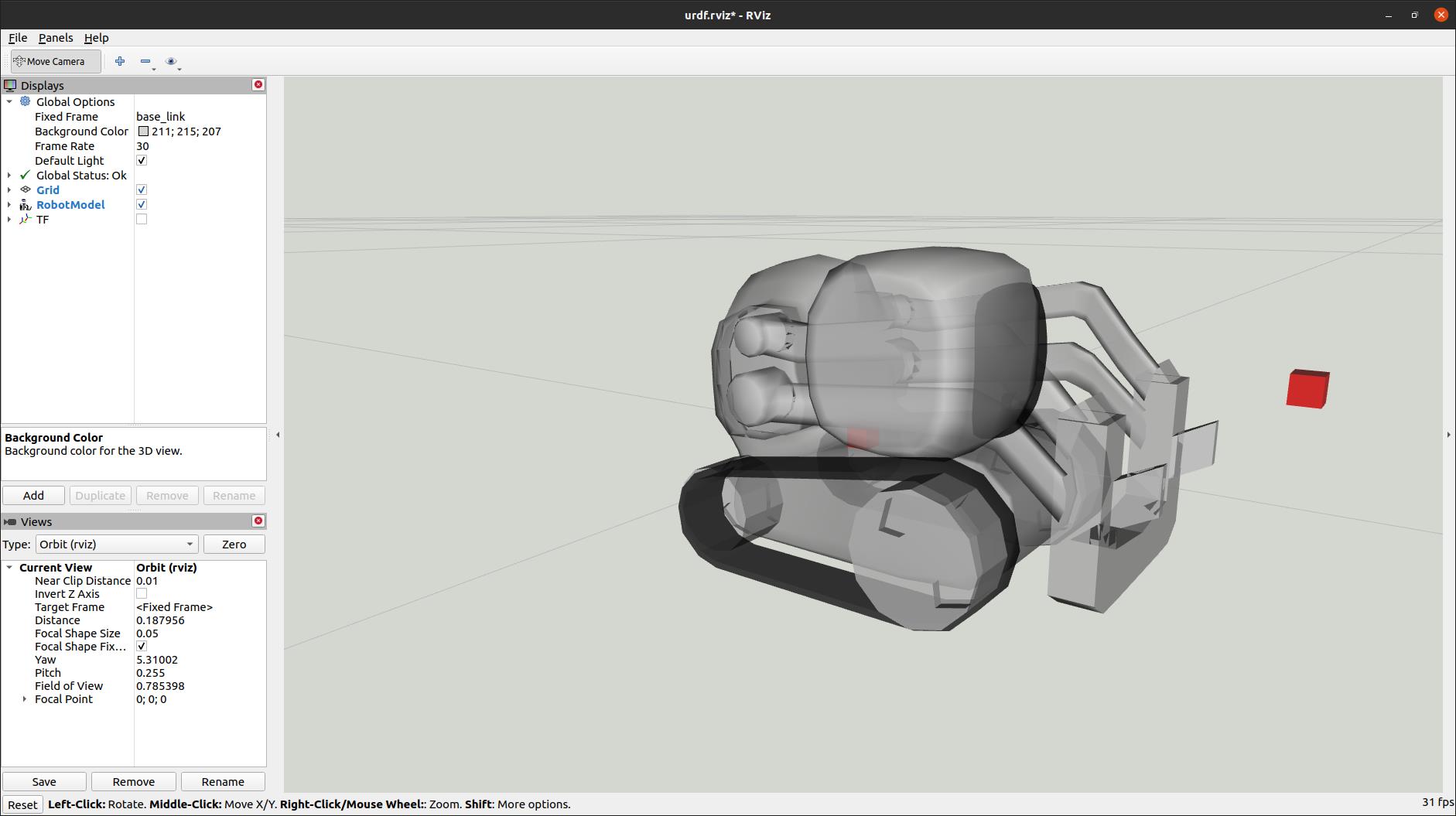
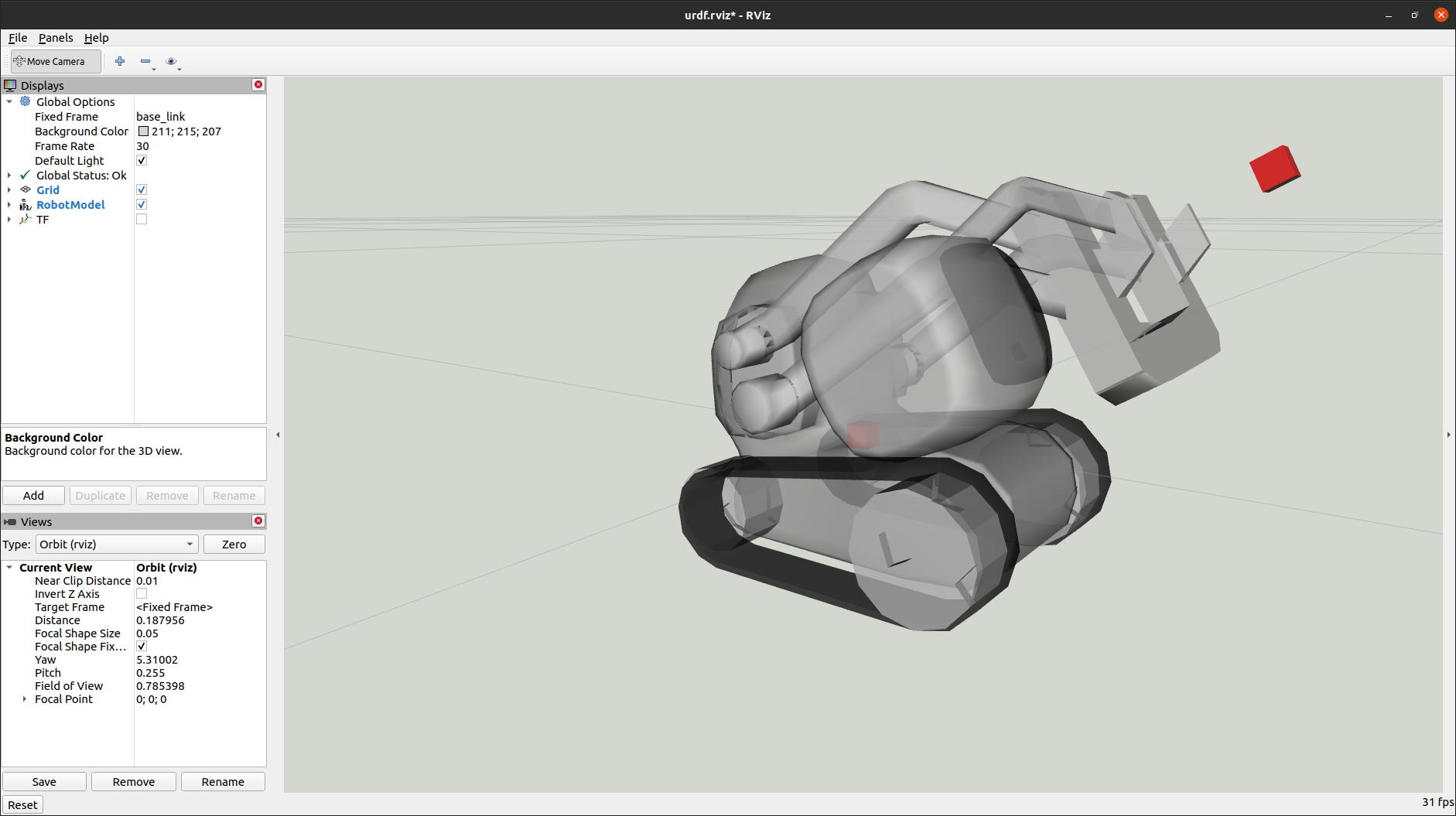
- cozmo2
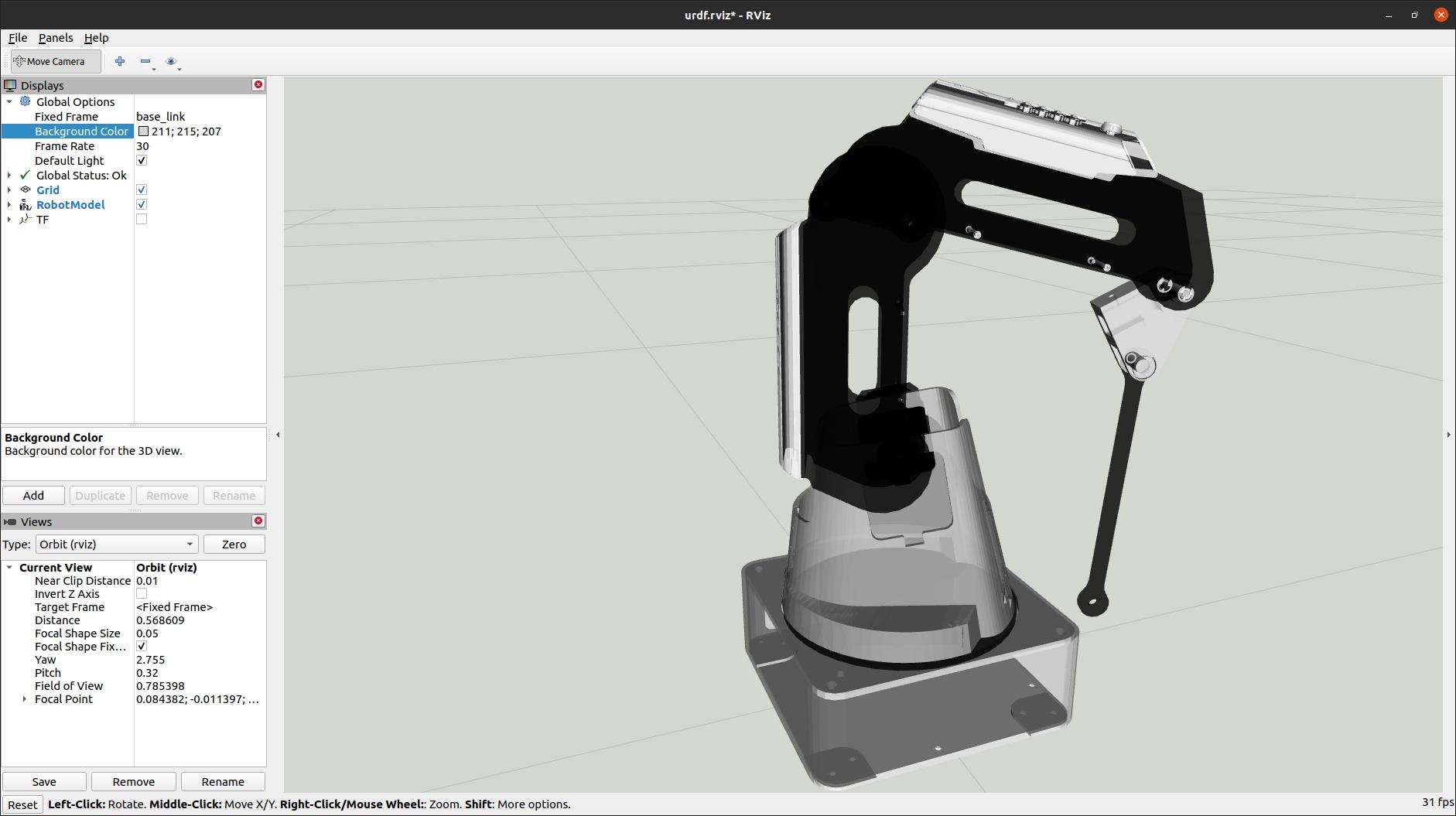
- magician
- robot1_base1
当然,开源模型都可以加入并直接使用。
cozmo2:
magician:
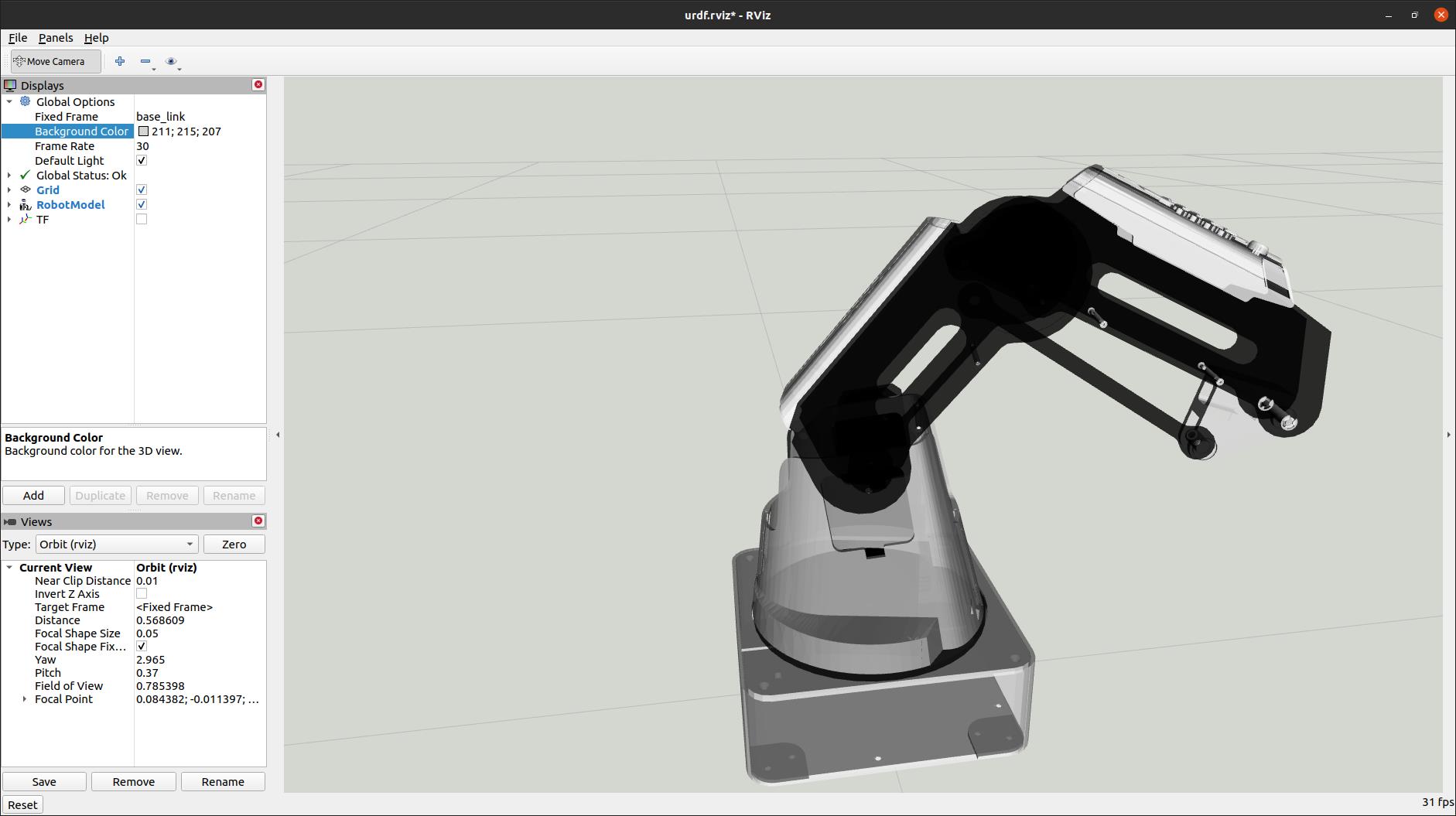
其余案例依据官网学习即可。
robot1_base1如下:
<?xml version="1.0" ?>
<robot name="robot1_xacro" xmlns:controller="http://playerstage.sourceforge.net/gazebo/xmlschema/#controller" xmlns:interface="http://playerstage.sourceforge.net/gazebo/xmlschema/#interface" xmlns:sensor="http://playerstage.sourceforge.net/gazebo/xmlschema/#sensor">
<link name="base_footprint">
<visual>
<geometry>
<box size="0.001 0.001 0.001"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
<inertial>
<mass value="0.0001"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<gazebo reference="base_footprint">
<material>Gazebo/Green</material>
<turnGravityOff>false</turnGravityOff>
</gazebo>
<joint name="base_footprint_joint" type="fixed">
<origin xyz="0 0 0"/>
<parent link="base_footprint"/>
<child link="base_link"/>
</joint>
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 1.54" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<box size="0.2 .3 0.1"/>
</geometry>
</collision>
<inertial>
<mass value="10"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<link name="wheel_4">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0"/>
<material name="black"/>
</visual>
<collision>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
</collision>
<inertial>
<mass value="1"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="base_to_wheel1" type="continuous">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin rpy="1.5707 0 0" xyz="0.1 0.15 0"/>
<axis xyz="0 0 1"/>
</joint>
<joint name="base_to_wheel2" type="continuous">
<axis xyz="0 0 1"/>
<anchor xyz="0 0 0"/>
<limit effort="100" velocity="100"/>
<parent link="base_link"/>
<child link="wheel_2"/>
<origin rpy="1.5707 0 0" xyz="-0.1 0.15 0"/>
</joint>
<joint name="base_to_wheel3" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1"/>
<child link="wheel_3"/>
<origin rpy="1.5707 0 0" xyz="0.1 -0.15 0"/>
</joint>
<joint name="base_to_wheel4" type="continuous">
<parent link="base_link"/>
<axis xyz="0 0 1"/>
<child link="wheel_4"/>
<origin rpy="1.5707 0 0" xyz="-0.1 -0.15 0"/>
</joint>
</robot>git记录如下:
- git init
- git remote add origin https://gitcode.net/ZhangRelay/urdf_tutorial.git
- git add .
- git commit -m "Initial commit"
- git push -u origin master
ros1:
- roslaunch urdf_tutorial display.launch model:=urdf/cozmo2.urdf
- roslaunch urdf_tutorial display.launch model:=urdf/magician.urdf
- roslaunch urdf_tutorial display.launch model:=urdf/robot1_base1.urdf
ros2:
- ros2 launch urdf_tutorial display.launch.py model:=urdf/robot1_base1.urdf
- ros2 launch urdf_tutorial display.launch.py model:=urdf/magician.urdf
- ros2 launch urdf_tutorial display.launch.py model:=urdf/cozmo2.urdf
以上是关于URDF机器人模型ROS1&2案例(noetic+galactic)的主要内容,如果未能解决你的问题,请参考以下文章