3d激光雷达开发(icp匹配)
Posted 费晓行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3d激光雷达开发(icp匹配)相关的知识,希望对你有一定的参考价值。
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
所谓匹配,其实就是看两个点云数据里面,哪些关键点是一样的。这样就可以把一个点云移动到另外合适的位置,组成一个新的点云。一般来说,单个机器人上面,3d激光扫描到的空间总是有限的,有了这个匹配算法,就可以把所有的点云组合成一个完整的3d地图了。参考的代码原来链接在这,https://pcl.readthedocs.io/projects/tutorials/en/master/iterative_closest_point.html#iterative-closest-point
在pcl库里面,这个匹配过程称之为registration,有一点拗口,不清楚为什么取这个名字。
1、准备iterative_closest_point.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/registration/icp.h>
int
main (int argc, char** argv)
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in (new pcl::PointCloud<pcl::PointXYZ>(5,1));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>);
// Fill in the CloudIn data
for (auto& point : *cloud_in)
point.x = 1024 * rand() / (RAND_MAX + 1.0f);
point.y = 1024 * rand() / (RAND_MAX + 1.0f);
point.z = 1024 * rand() / (RAND_MAX + 1.0f);
std::cout << "Saved " << cloud_in->size () << " data points to input:" << std::endl;
for (auto& point : *cloud_in)
std::cout << point << std::endl;
*cloud_out = *cloud_in;
std::cout << "size:" << cloud_out->size() << std::endl;
for (auto& point : *cloud_out)
point.z += 0.7f;
std::cout << "Transformed " << cloud_in->size () << " data points:" << std::endl;
for (auto& point : *cloud_out)
std::cout << point << std::endl;
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(cloud_in);
icp.setInputTarget(cloud_out);
pcl::PointCloud<pcl::PointXYZ> Final;
icp.align(Final);
std::cout << "has converged:" << icp.hasConverged() << " score: " <<
icp.getFitnessScore() << std::endl;
std::cout << icp.getFinalTransformation() << std::endl;
return (0);
2、准备CMakeLists.txt文件
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(iterative_closest_point)
find_package(PCL 1.2 REQUIRED)
include_directories($PCL_INCLUDE_DIRS)
link_directories($PCL_LIBRARY_DIRS)
add_definitions($PCL_DEFINITIONS)
add_executable (iterative_closest_point iterative_closest_point.cpp)
target_link_libraries (iterative_closest_point $PCL_LIBRARIES)3、生成sln工程,开始编译

4、执行iterative_closest_point.exe

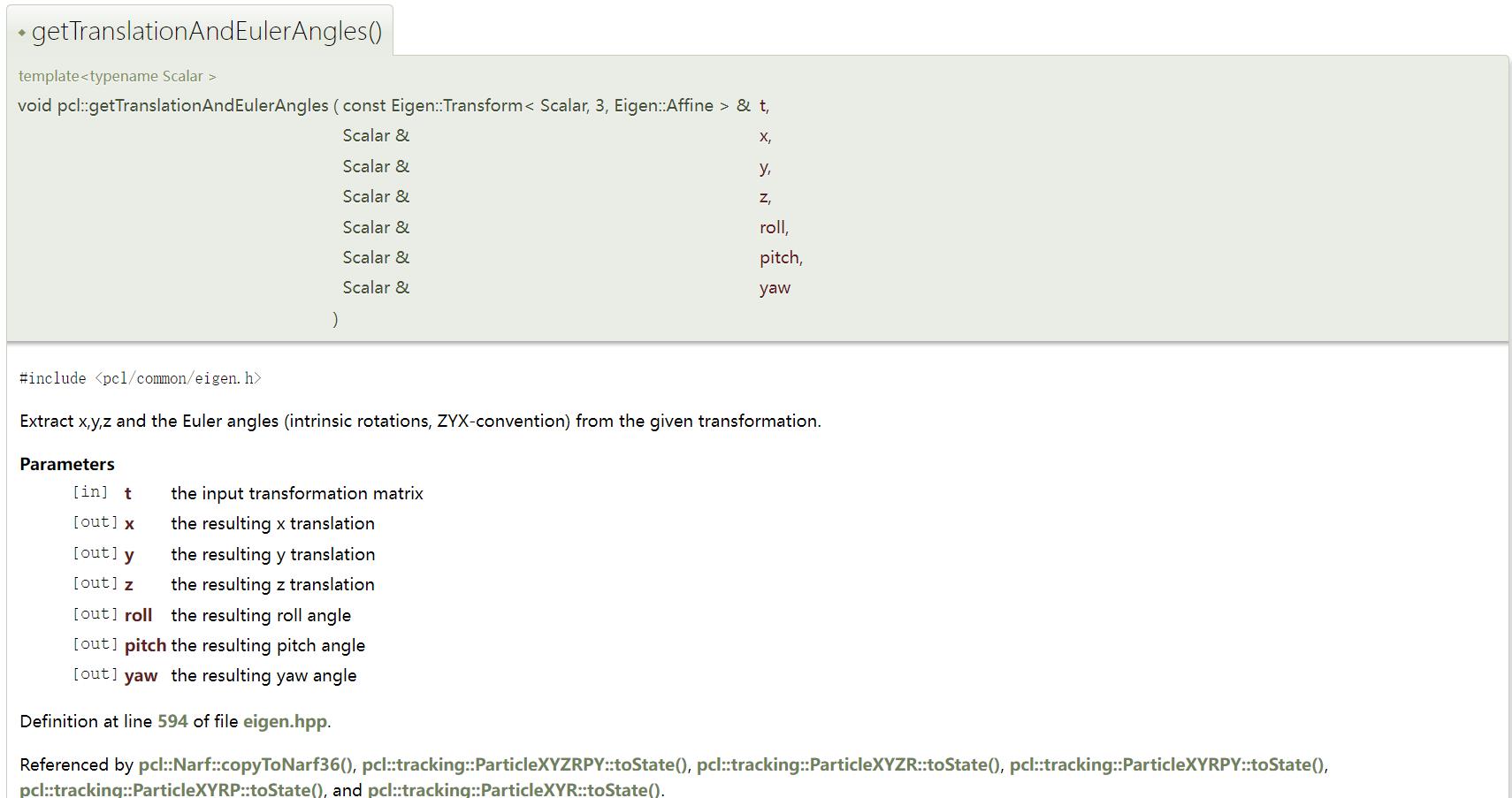
5、补充怎么从旋转矩阵获取yaw/pitch/roll/x/y/z
以上是关于3d激光雷达开发(icp匹配)的主要内容,如果未能解决你的问题,请参考以下文章