定位仿真基于matlab RSSI三边定位仿真含Matlab源码 1690期
Posted 紫极神光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了定位仿真基于matlab RSSI三边定位仿真含Matlab源码 1690期相关的知识,希望对你有一定的参考价值。
一、获取代码方式
获取代码方式1:
完整代码已上传我的资源:【定位仿真】基于matlab RSSI三边定位仿真【含Matlab源码 1690期】
获取代码方式2:
通过订阅紫极神光博客付费专栏,凭支付凭证,私信博主,可获得此代码。
备注:
订阅紫极神光博客付费专栏,仅只能免费获得1份代码;
二、简介

三、部分源代码
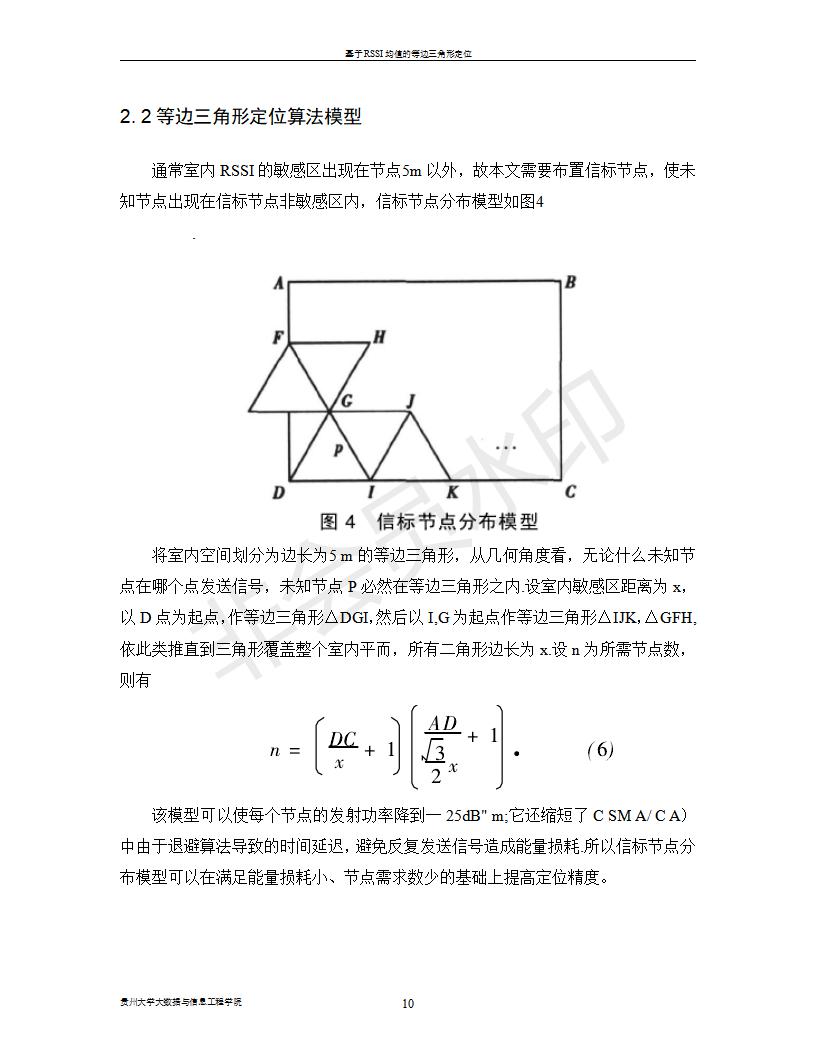
%信标节点位于等边三角形顶点的仿真
clc
clear all
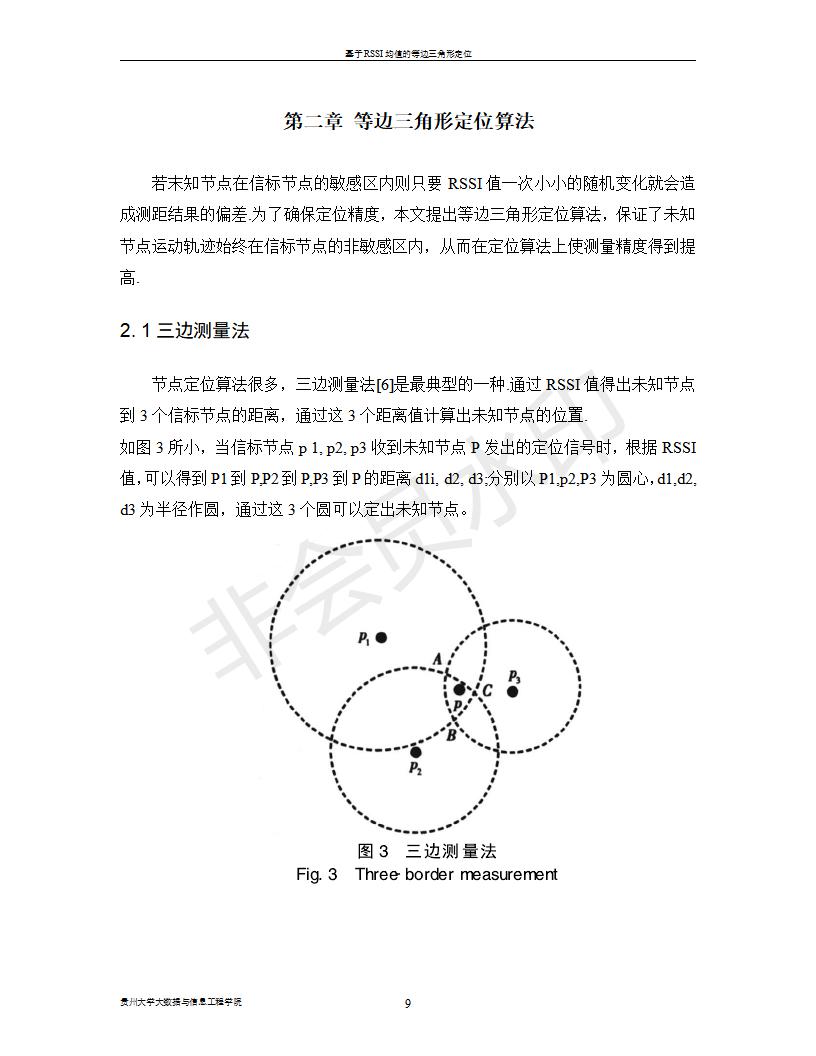
%A,B,C为三个选定的信标节点,节点坐标已知(为便于防真及验证,代码中采用的等边三角形)
for t = 1:5
A = [0,0];
B = [5*t,5*t*sqrt(3)];
C = [10*t,0];
nums = [A(1),A(2),B(1),B(2),C(1),C(2)];
p = min(nums);
q = max(nums);
L = sqrt((A(1)-C(1))^2+(A(2)-C(2))^2);
m = 5;
%生成在[p,q]上满足均匀分布的随机数矩阵
%即生成一组m行2列的有可能落在等边三角形区域内的坐标
numbox = p+(q-p)*rand(m,2);
%计数初值,最终根据计算将随机生成的点中落在等边三角形区域内的坐标存放于新的矩阵
n = 1;
for i = 1:m
dA(i) = sqrt((numbox(i,1)-A(1))^2+(numbox(i,2)-A(2))^2);
dB(i) = sqrt((numbox(i,1)-B(1))^2+(numbox(i,2)-B(2))^2);
dC(i) = sqrt((numbox(i,1)-C(1))^2+(numbox(i,2)-C(2))^2);
%将确实在等边三角形区域内的坐标存入P_position矩阵
if (dA(i)<=L) & (dB(i)<=L) & (dC(i)<=L)
P_position(n,1) = numbox(i,1);
P_position(n,2) = numbox(i,2);
n = n+1;
end
end
%N为随机生成的点中落在等边三角形区域内的点(测试点)的个数
N = n-1
if N == 0
disp('所取的随机坐标无一落在等边三角形内,请增大m值重新运行程序.')
return
end
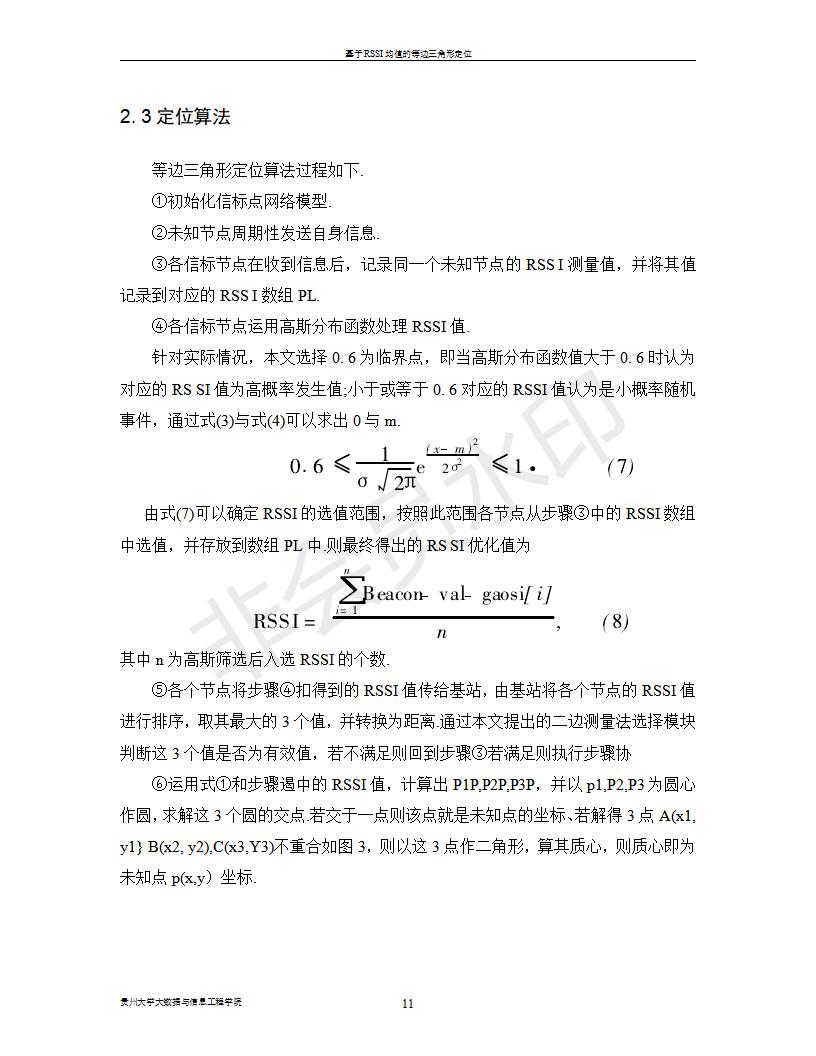
%计算测试点离三个顶点的实际距离
%dis为N行3列的矩阵,用于存放N个测试点分别到等边三角形三个顶点A,B,C的实际距离
for i = 1:N
dis(i,1) = sqrt((P_position(i,1)-A(1))^2+(P_position(i,2)-A(2))^2);
dis(i,2) = sqrt((P_position(i,1)-B(1))^2+(P_position(i,2)-B(2))^2);
dis(i,3) = sqrt((P_position(i,1)-C(1))^2+(P_position(i,2)-C(2))^2);
end
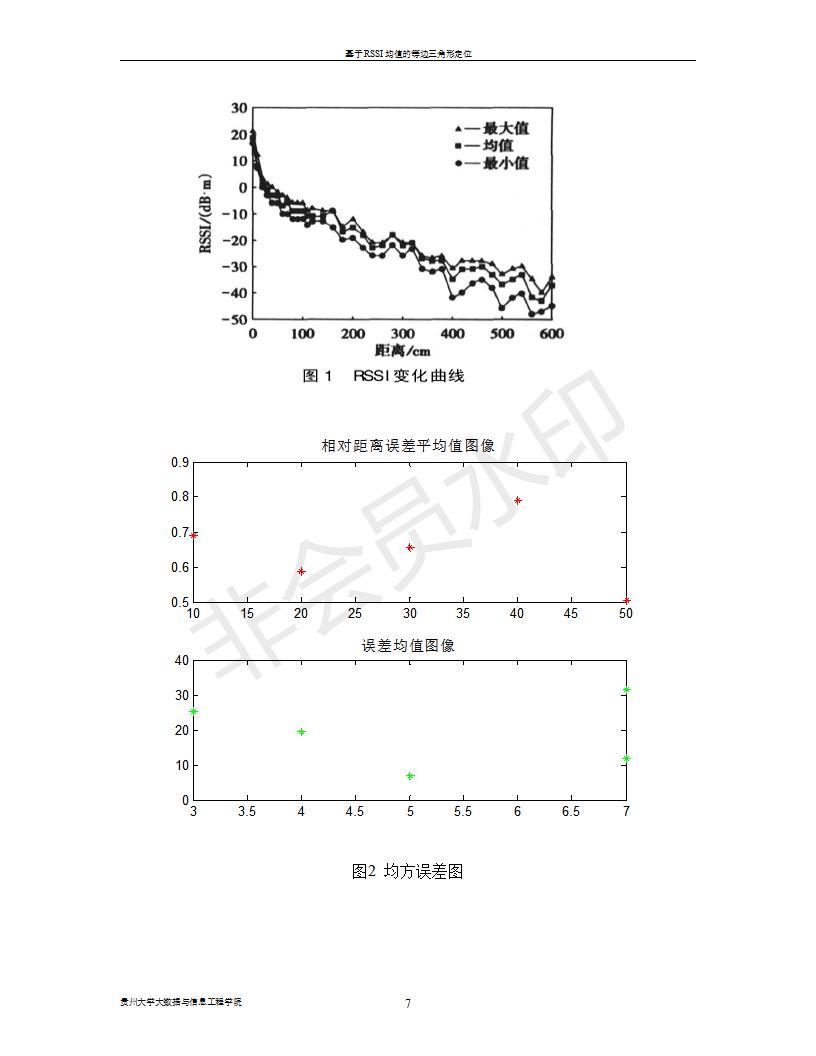
%根据函数Distance计算测试点离三个顶点的测试距离(考虑了衰减及环境误差等)
%dis_test为N行3列的矩阵,用于存放N个测试点分别到等边三角形三个顶点A,B,C的测试距离
a = 7; %由RSSI计算T-R距离时使用的参数
for i = 1:N
dis_test(i,1) = Distance(dis(i,1),a);
dis_test(i,2) = Distance(dis(i,2),a);
dis_test(i,3) = Distance(dis(i,3),a);
end
%根据函数Triangle及求得的测试距离进行定位
%P_calculate为N行2列的矩阵,用于存放定位后的N个坐标
for i = 1:N
P_temp = Triangle(A,B,C,dis_test(i,1),dis_test(i,2),dis_test(i,3));
P_calculate(i,1) = P_temp(1);
P_calculate(i,2) = P_temp(2);
end
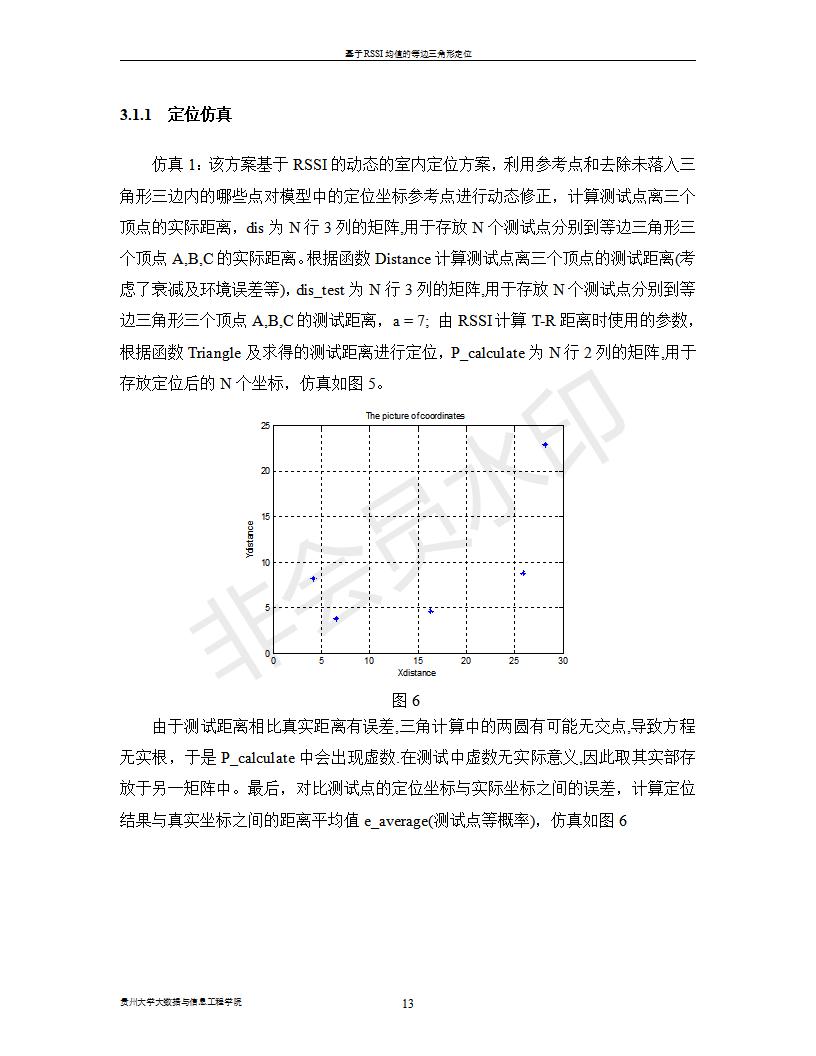
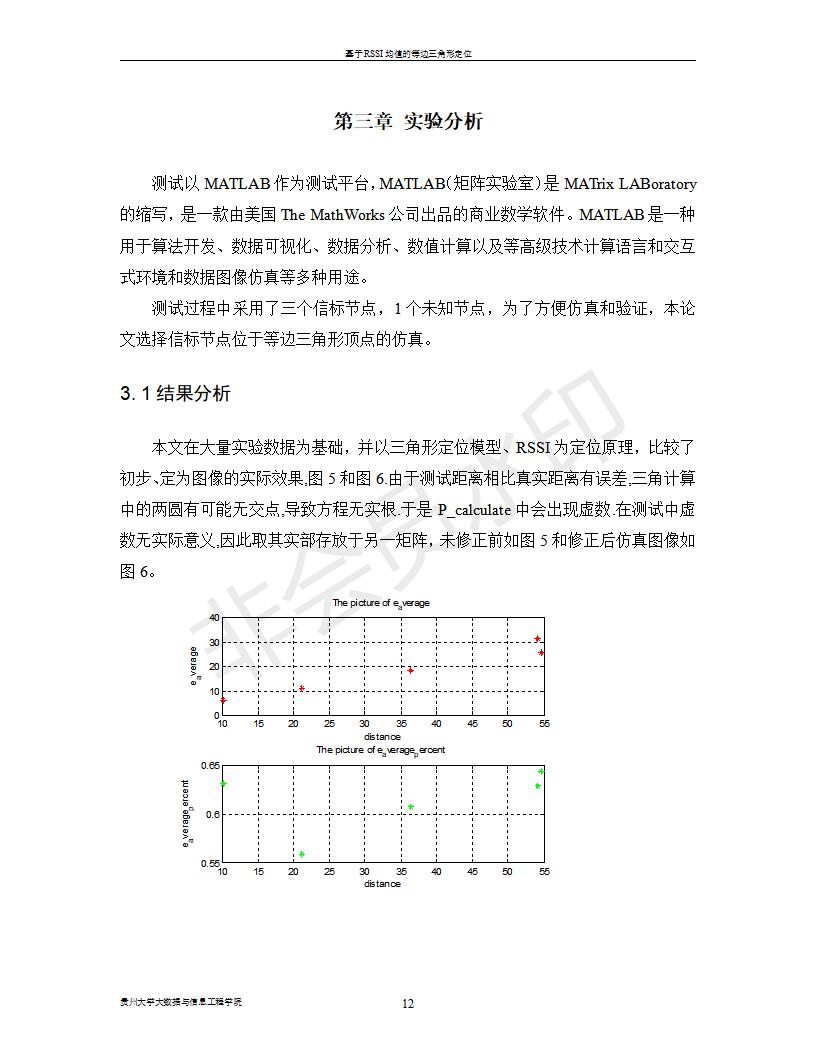
%由于测试距离相比真实距离有误差,三角计算中的两圆有可能无交点,导致方程无实根.
%于是P_calculate中会出现虚数.在测试中虚数无实际意义,因此取其实部存放于另一矩阵
for i = 1:N
P_calculate_real(i,1) = real(P_calculate(i,1));
P_calculate_real(i,2) = real(P_calculate(i,2));
end
%对比测试点的定位坐标与实际坐标之间的误差
P_position;
P_calculate;
P_calculate_real;
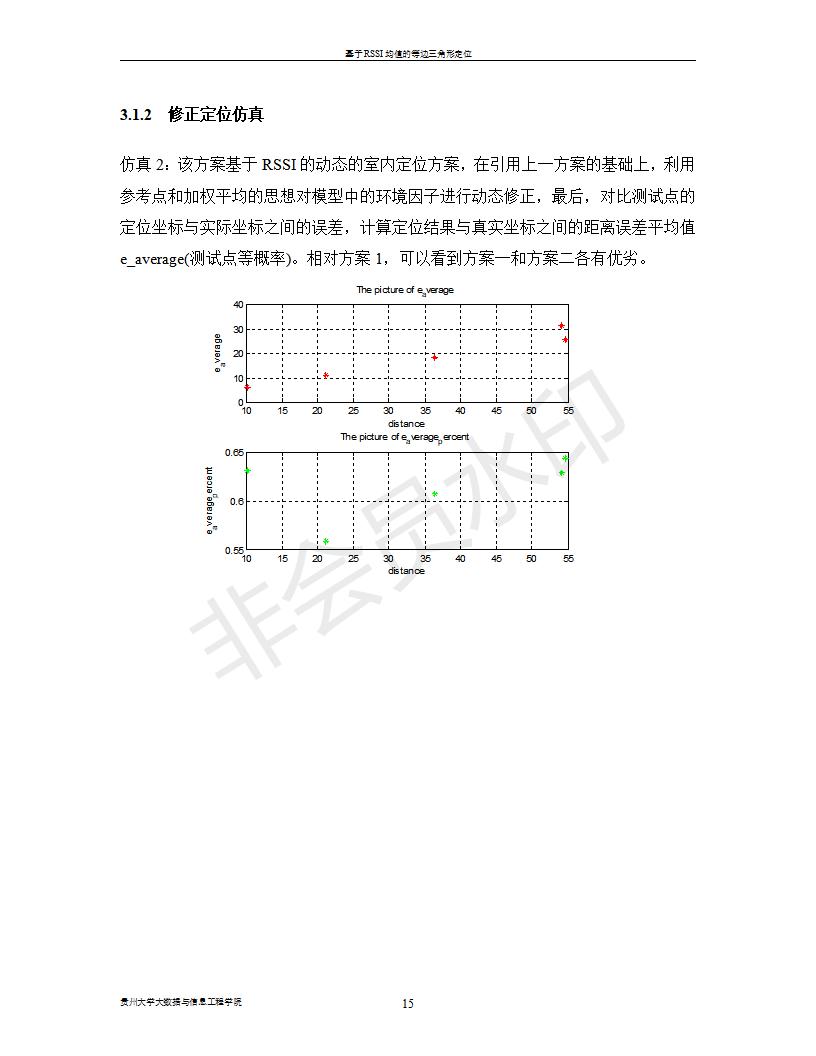
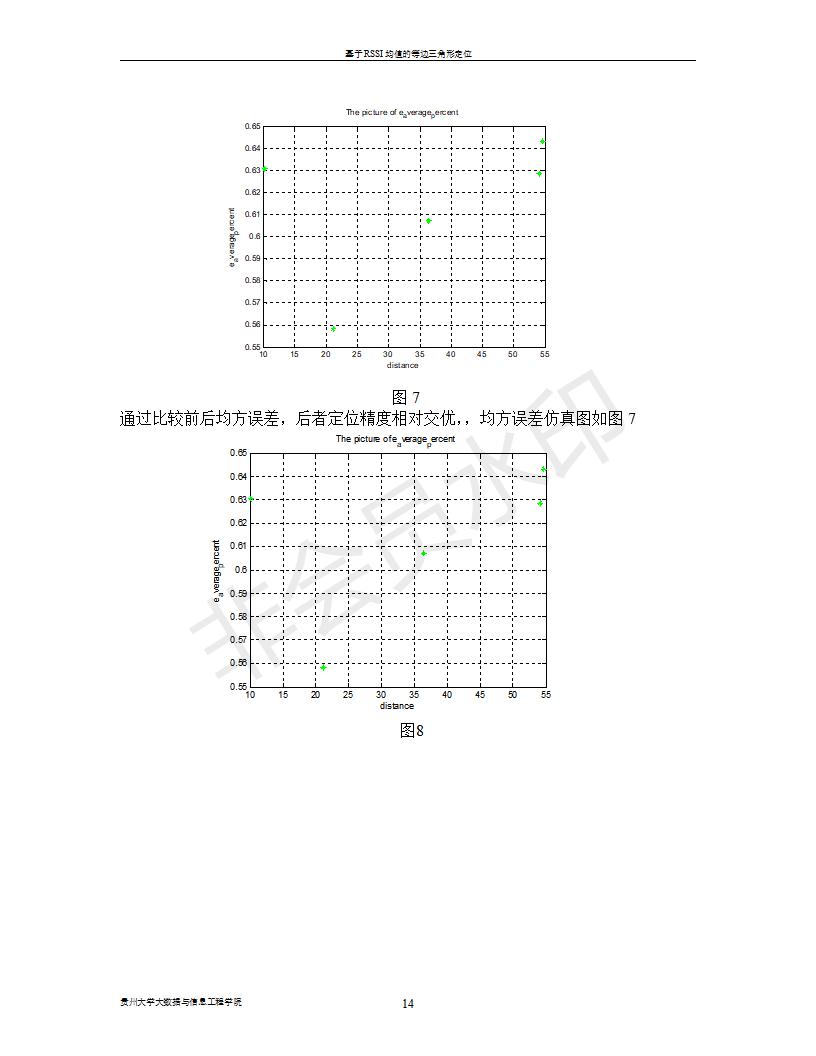
%计算定位结果与真实坐标之间的距离误差平均值e_average(测试点等概率)
e_sum = 0;
for i = 1:N
e = sqrt((P_calculate_real(i,1)-P_position(i,1))^2+(P_calculate_real(i,2)-P_position(i,2))^2);
e_sum = e_sum+e;
end
e_average = e_sum/N;
e_average_percent = e_average/L;
e_average_box(t) = e_average
e_average_percent_box(t) = e_average_percent
end
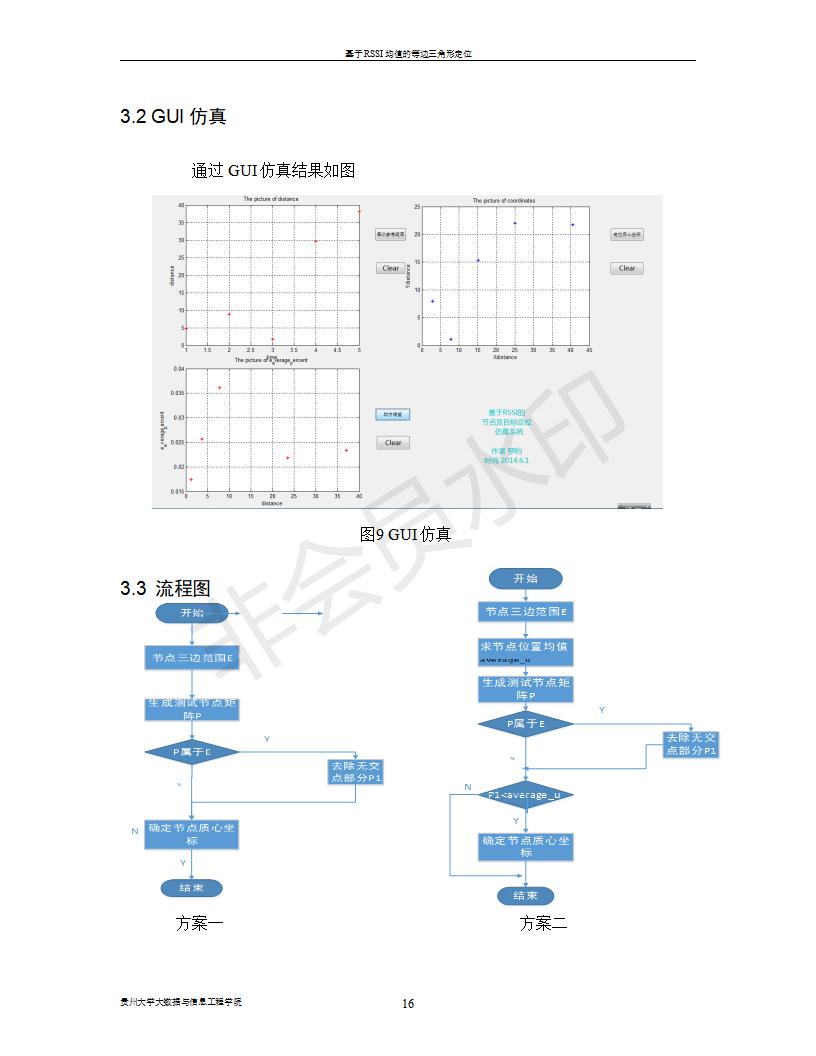
四、运行结果
五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 门云阁.MATLAB物理计算与可视化[M].清华大学出版社,2013.
以上是关于定位仿真基于matlab RSSI三边定位仿真含Matlab源码 1690期的主要内容,如果未能解决你的问题,请参考以下文章