自动化缺陷检测系统02---系统平台搭建
Posted ZHW_AI课题组
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动化缺陷检测系统02---系统平台搭建相关的知识,希望对你有一定的参考价值。
作者介绍
张伟伟,男,西安工程大学电子信息学院,2019级硕士研究生,张宏伟人工智能课题组。
研究方向:机器视觉与人工智能。
电子邮件:zhangweiweicpp@163.com
1.硬件平台搭建
1.1 深度学习嵌入式推理终端- -JetsonTX2(Linux系统)
Jetson TX2是NIVDIA瞄准人工智能在Jetson TK1和TX1推出后的升级,如下图所示。TX2的GPU和CPU都进行了升级,内存增加到了8GB、存储增加到了32GB,支持Wifi和蓝牙,编解码支持H.265,体型同样小巧。Jetson TX2提供两种运行模态:一种是MAX Q,能效比能达到最高,是上一代的TX1的2倍,功耗在7.5W以下;另一种是MAX P,性能可以做到最高,能效比同样可以做到前一代的2倍,功耗则在15W以下。

Jetson TX2的特点是NVIDIA Pascal GPU有256个CUDA有能力的核心。CPU复杂部分由两个ARM v8 64位CPU集群组成,它们由高性能的相干互连结构连接。为提高单线程性能,优化了丹佛2(双核)CPU集群;第二个CPU集群是一个ARM Cortex-A57 QuadCore,它更适合于多线程应用程序。
内存子系统包含一个128位的内存控制器,它提供高带宽LPDDR4支持。8 GB LPDDR4主存和32 GB eMMC闪存集成在模块上。从TX1 64位到128位的设计是一个主要的性能提升。
该模块还支持硬件视频编码器和解码器,支持4K超高清视频以不同格式的60fps。这与混合Jetson TX1模块略有不同,后者使用了Tegra SoC上运行的专用硬件和软件来完成这些任务。还包括一个音频处理引擎,全硬件支持多通道音频。Jetson TX2支持Wi-Fi和蓝牙无线连接。Wi-Fi比之前的Jetson TX1有了很大的改进,包括千兆以太网基础。
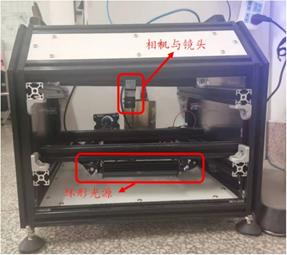
1.2 硬件之光源、工业相机、图像采集卡
光源:要想获得高品质和高对比度的织物图像,使疵点区域和正常纹理区域清晰的呈现出来,选择合适的照明光源是重要保证。通过与最优照明设计方案相结合,让庇点特征尽量突现,有利于提高碗点检测的精度和准确率。
工业相机:是机器视觉系统的核心部件,其本质的功能就是通过CCD或CMOS成像传感器将镜头产生的光信号转变为有序的电信号,并将这些信息通过相应接口传送到相应的处理器。相比传统相机而言,它具有高稳定性、高传输能力和高抗干扰能力等优势。
- 彩色线阵CCD相机的输出信号时以时序脉冲驱动的调幅波信号,需要进行数据采集和转换,才能送到处理器进行处理。这样,为了按时序接收每个像敏电容单元的数据,通常的选择是采用具有内部静态存储的数据采集卡。图像数据采集卡对来自像敏单元的信号进行A/D转换,从而变成数字信号,然后将该信号送到自带的FIFO存储器中。当FIFO存储器中存放的数据到了一定数目时,由处理器从FIFO中读出,然后由处理器进行运算处理,并存储到主存储器中。
-面阵工业CCD:是可以获取二维图像信息,测量图像。缺点是像元总数多,而每行的像元数一般较线阵少,帧幅率受到限制;用于如面积、形状、尺寸、位置,甚至温度等的测量。面阵CCD。
图像采集卡:主要是捕获外界光电、视频、音频等模拟信号并将其数字化导入计算机进行数字处理的捕获设备。
1.3 光源选型和相机选型
- 光源:首先,光源要根据以下三点目标进行选型:①提高系统采集的待测物体的亮度。②在满足检测要求并且不丢失感兴趣目标细节的情况下,形成有利于图像处理的成像效果。③考虑机器视觉系统周边环境中光的干扰,以及机械振动的干扰,保证采集图像的稳定性,提高机器视觉系统的精度与效率。
光源类型的选择要综合光源类型、光照方向、寿命、价格等因素。机器视觉系统中的光源类型一般可以选择卤素光纤、日光灯管、LED灯等,根据显色和寿命选择LED光源,可调节亮度等级。 - 相机:相机选择的重要参数如下

(1)扫描频率
在面阵相机中此概念指的是单位时间内相机获取图像的帧数,而在线阵相机中指的是单位时间内线扫描的行数。本文选用的是CMOS面阵相机,其帧频为14帧/秒。
(2)分辨率
感光芯片上的总像元数,也指的是采集图像的总像素数。本文选用的相机的分辨率为2590×1942。
(3)传输接口
图像数据采集后需要传输到处理模块,因此相机需要一个高效的图像输出方式。常见的传输接口有USB、IEEE 1394、Giga Bit Ethernet、Camera Link等。不同的传输接口需要配备不同的控制的模块。本文采用的相机具有Giga Bit Ethernet接口,也就是千兆以太网卡。
经综合考虑和分析,本文选择德国Basler公司生产的相机,其型号为Basler acA2500-14gc GigE千兆以太网彩色CMOS面阵相机,如图2-4所示。该相机的性能指标见表。

2.软件平台搭建
安装Pycharm,Anaconda,Pytorch,Python和PyQt5。

Anaconda,Pytorch,Python,Pycharm的安装可参考以前我编写的帖子。
下面主要记录PyQt5的安装和Pycharm的配置:
- 安装PyQt5
pip install pyqt5 pyqt5-tools
- 在Pycharm中设置添加PyQt5的工具选项,参考如下链接,(路径通过exe搜索进行搜索得到路径,记录我的Anaconda安装路径:E:\\Anaconda_install\\envs\\py36six)
https://www.jb51.net/article/183411.htm
https://blog.csdn.net/stormdony/article/details/80400032
- 安装图像处理和数学形态学运算的包
pip install scikit-image
以上是关于自动化缺陷检测系统02---系统平台搭建的主要内容,如果未能解决你的问题,请参考以下文章