多目标跟踪(MOT/MTT)
Posted Arrow
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多目标跟踪(MOT/MTT)相关的知识,希望对你有一定的参考价值。
1. 概述
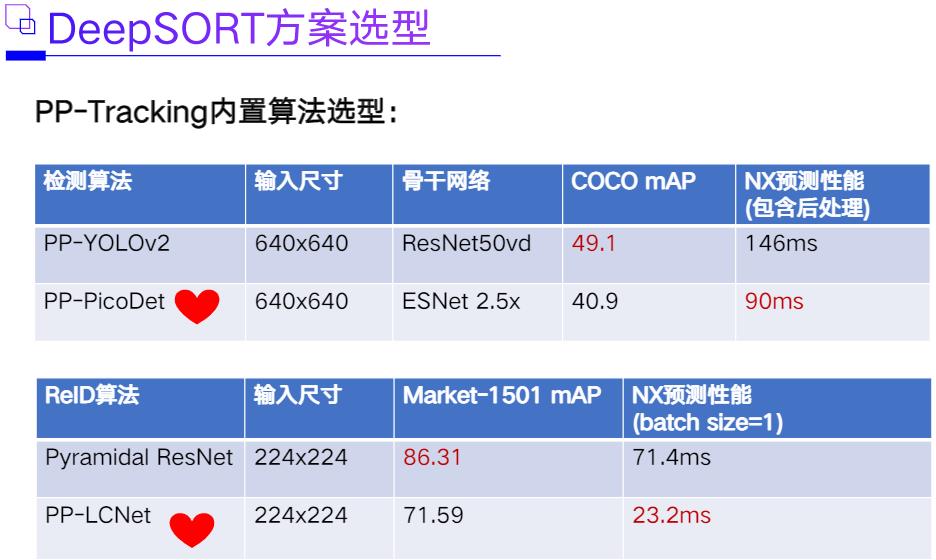
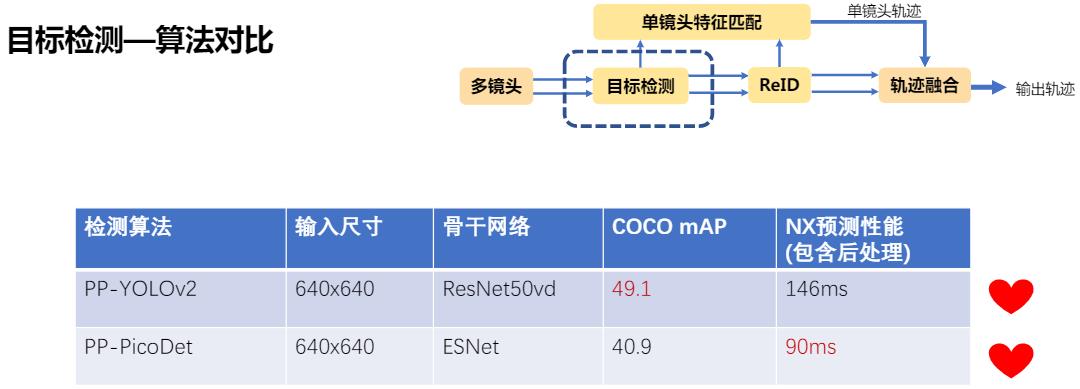
- PP-PicoDet与 PP-Yolo速度相当,但精度更高。
1.1 常用术语
- FPN:Feature Pyramid Network (特征金字塔)
- DCN :Deformable Convolution (可变形卷积)
- SPP:Spatial Pyramid Pooling Layer
- SOT:Single Object Tracking (单目标跟踪)
- MTT:Multiple Target Tracking (多目标跟踪)
- MOT:Multiple Object Tracking (多目标跟踪)
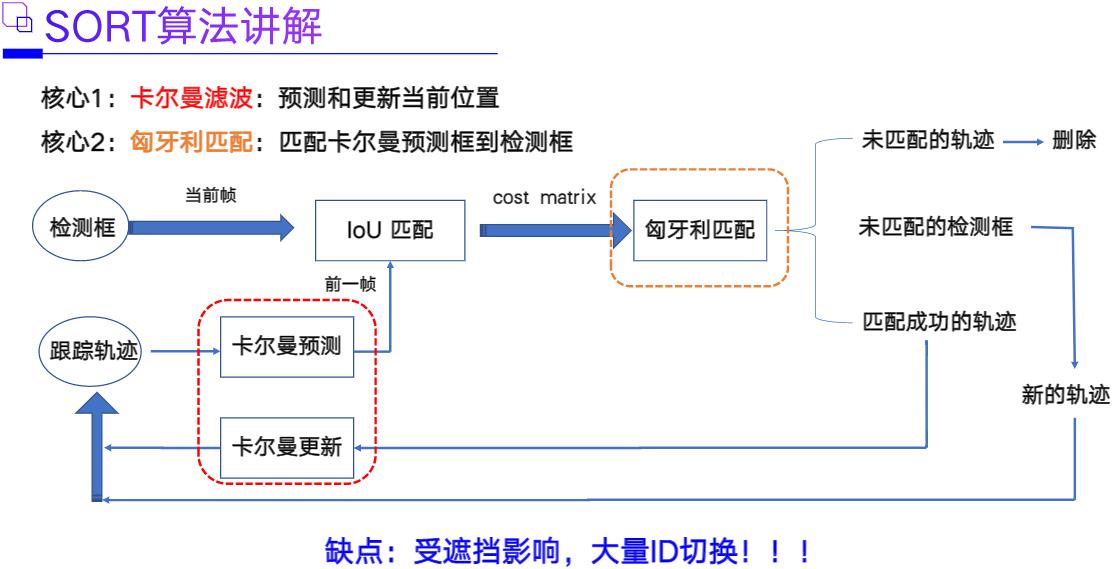
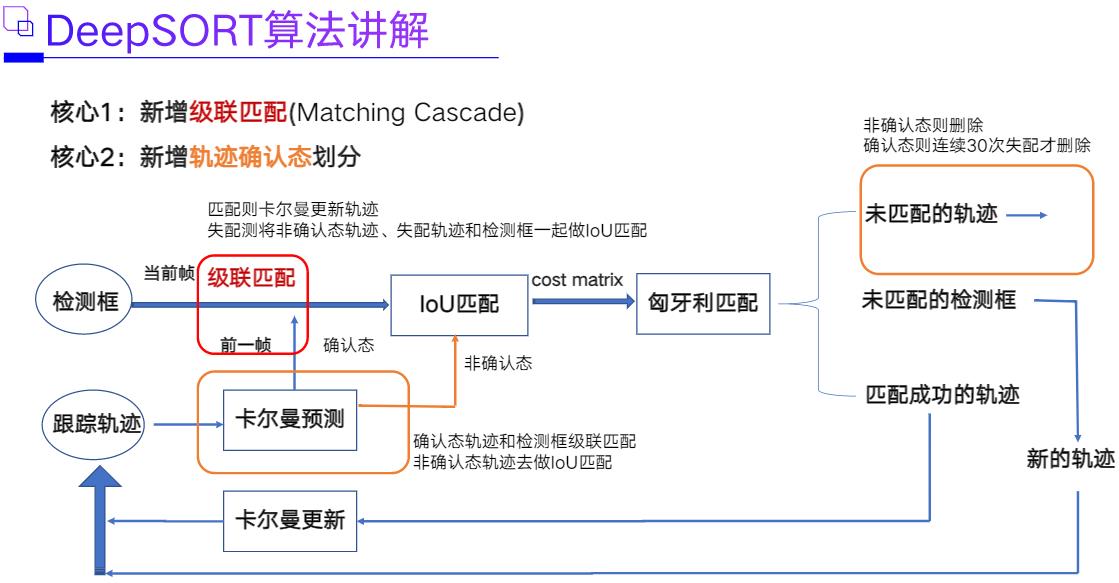
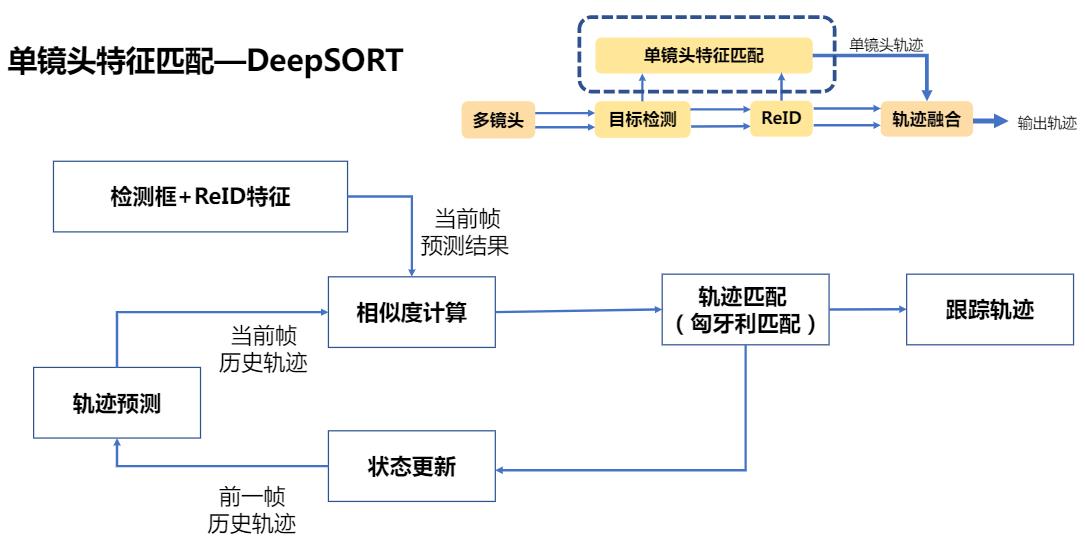
- 使用卡尔曼滤波算法对多目标的状态进行估计
- 使用匈牙利算法对多目标进行匹配,实现多目标跟踪。
- CBN: Cross-iteration Batch Normalization (交叉迭代批量归一化)
- PAN:Path Aggregation Network(路径聚合网络)
- SORT:Simple Online and Realtime Tracking (简单在线和实时跟踪)
- ReID:Person Re-identification (行人重识别)
- MTMC:Multi-Target Multi-Camera (跨摄像头多目标跟踪)
- SDE:Separate Detection Embedding (Detection与Embedding分为两个独立的模型,性能高、实时性差)
- JDE:Joint Detection Embedding(Detection与Embedding通过同一个网络实现,Detection用的是one-stage的方法)
- Heatmap:热力图,深度学习中常用Heatmap来表示二维坐标点
- 编码:将二维坐标点转化为热力图的过程叫做编码(神经网络模型的编码模块)。 常用的编码方法采用高斯分布来生成热力图,以高斯分布的中心点坐标来表示点坐标。
- 解码:将热力图转化为二维坐标点的过程叫解码(神经网络模型的解码模块)。解码过程通常处理的是非理想热力图,将热力图近似服从高斯分布,当前对热力图的解码方法有:标准法,偏移法和微分法。
1.2 数据集
1.3 网络组件
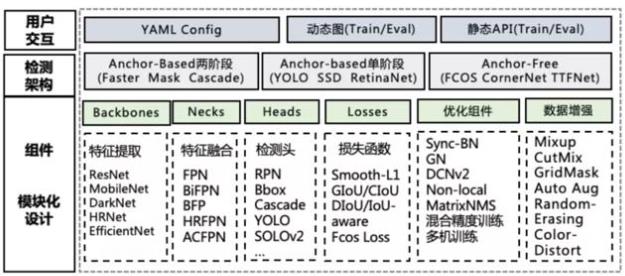

1.4.1 Backbone (骨干网络)
- 骨干网络负责特征提取,且已在大型数据集(例如ImageNet|COCO等)上完成预训练,拥有预训练参数的卷积神经网络,例如:ResNet-50、Darknet53等
- Backbone可用以下网络
- VGG16
- ResNet-50
- SpineNet
- EfficientNet-B0/B7
- CSPResNeXt50
- CSPDarknet53
1.4.2 Neck
- Neck位于Backone和Head之间,用于从不同阶段收集特征图,然后进行融合。
- 一个Neck由几个自下而上的路径和几个自上而下的路径组成。
- Neck可用以下网络
- Additional blocks: SPP, ASPP, RFB SAM
- Path-aggregation blocks: FPN, PAN, NAS-FPN, Fully-connected FPN, BiFPN, ASFF, SFAM
1.4.3 Head
- 用于预测目标的种类、位置(bounding boxes)和特征等输出信息
- 分类:
- Dense Prediction (one-stage):
- 基于Anchor:RPN, SSD, YOLO, RetinaNet
- 无Anchor :CornerNet, CenterNet, MatrixNet, FCOS
- Sparse Prediction (two-stage):
- 基于Anchor:Faster R-CNN , R-FCN, Mask RCNN
- 无Anchor :RepPoints
- Dense Prediction (one-stage):
1.5 移动端模型优化难点

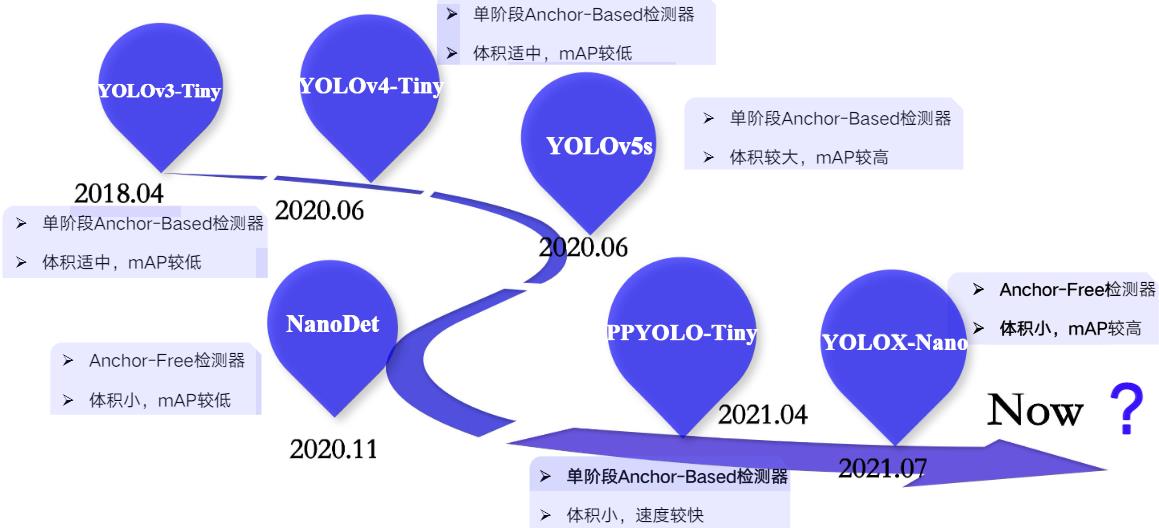
1.6 轻量级检测模型发展史
1.7 应用分类及算法

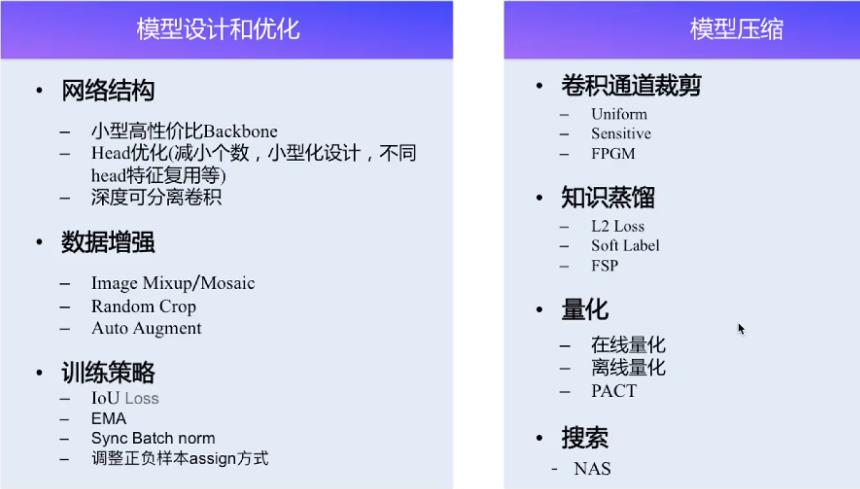
2. 移动端优化方法
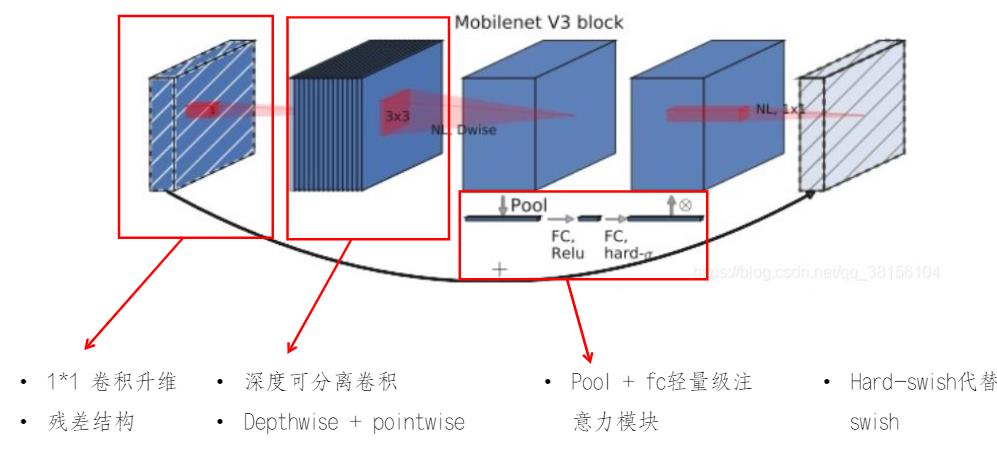
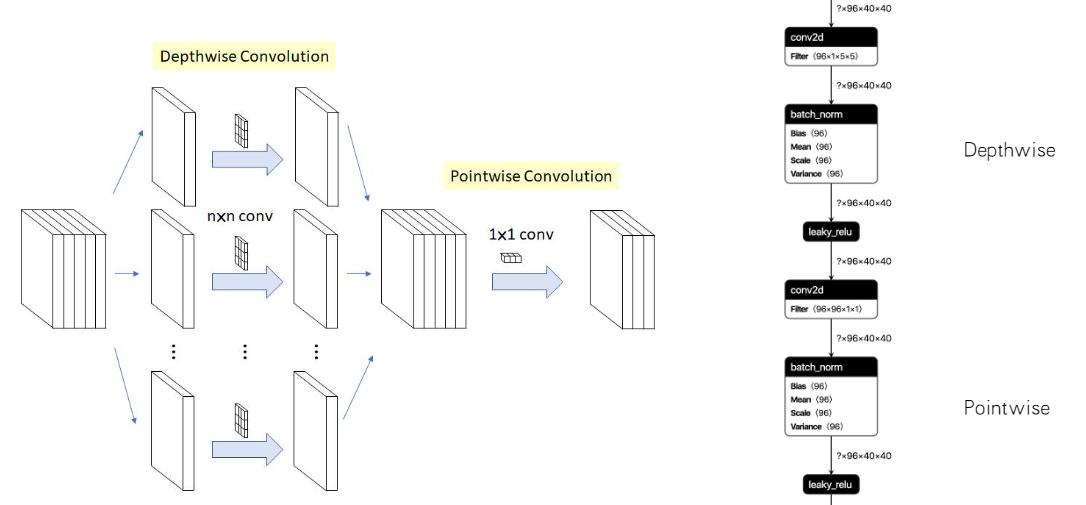
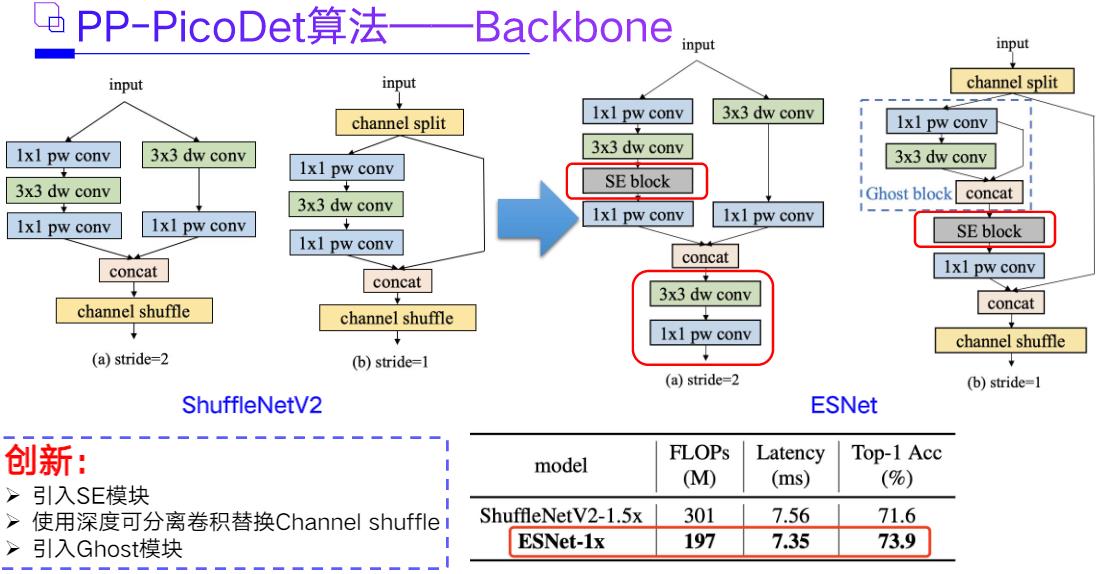
2.1 优化方法-BackBone选择
2.2 优化方法-Head优化
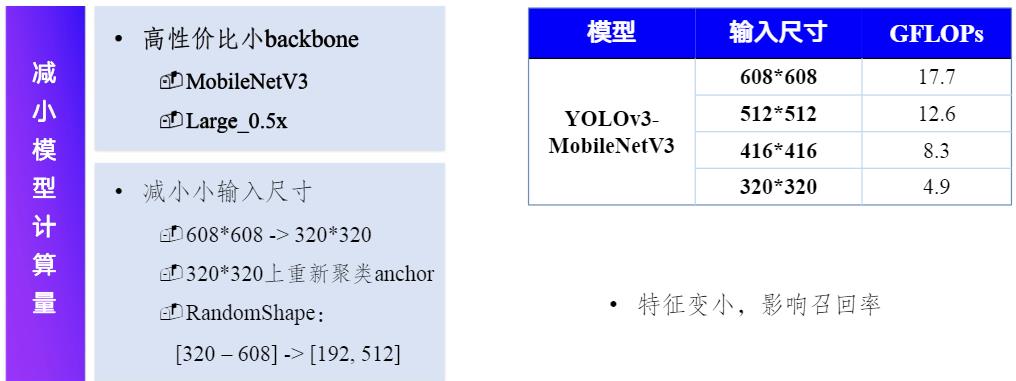
2.3 优化方法-减少输入尺寸
2.4 优化方法-召回率提升

2.5 优化方法及效果

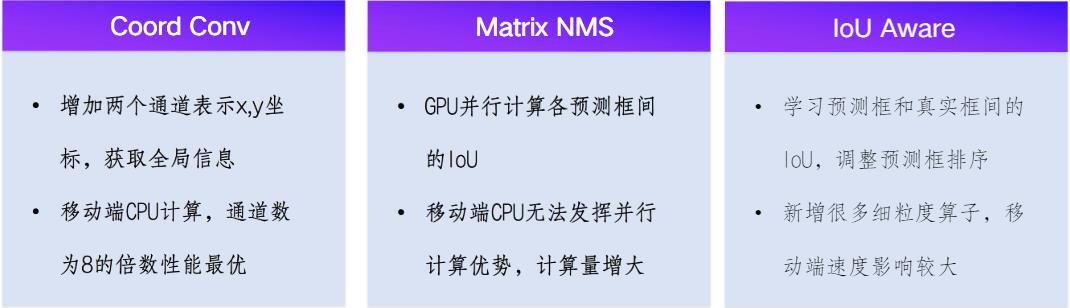
2.6 优化方法-丢弃移动端性价比低的方法
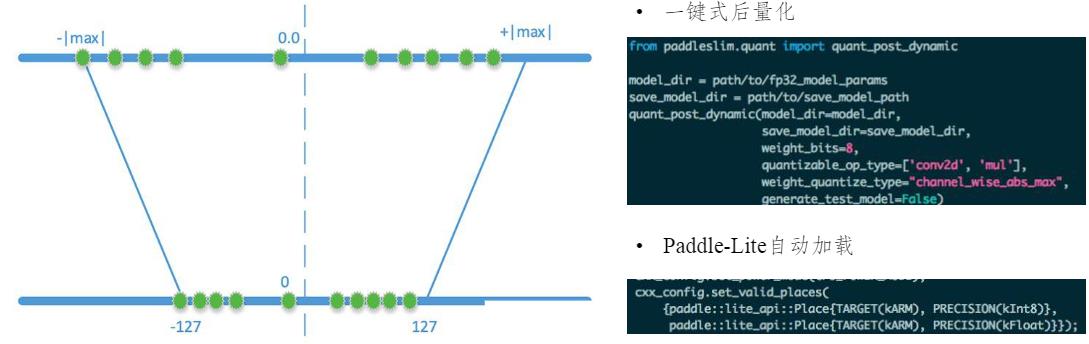
2.7 优化方法-后训练量化
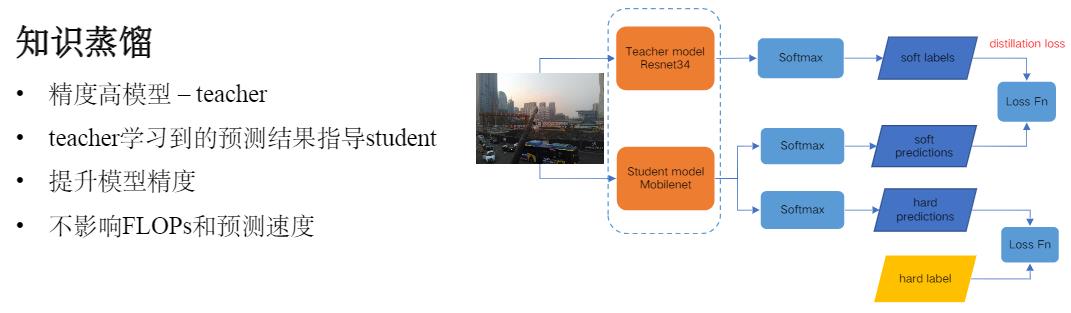
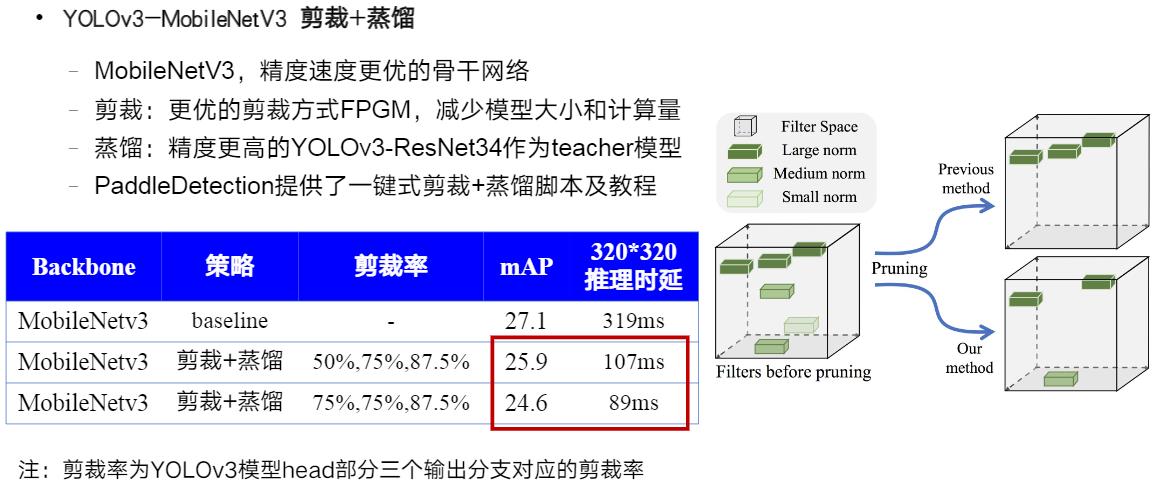
2.8 模型压缩



2.9 移动端模型库

3. PP-PicoDet
3.1 算法结构



3.2 优化预测精度和速度

4. 轻量级关键点检测算法
4.1 Top-Down与Bottom-Up对比



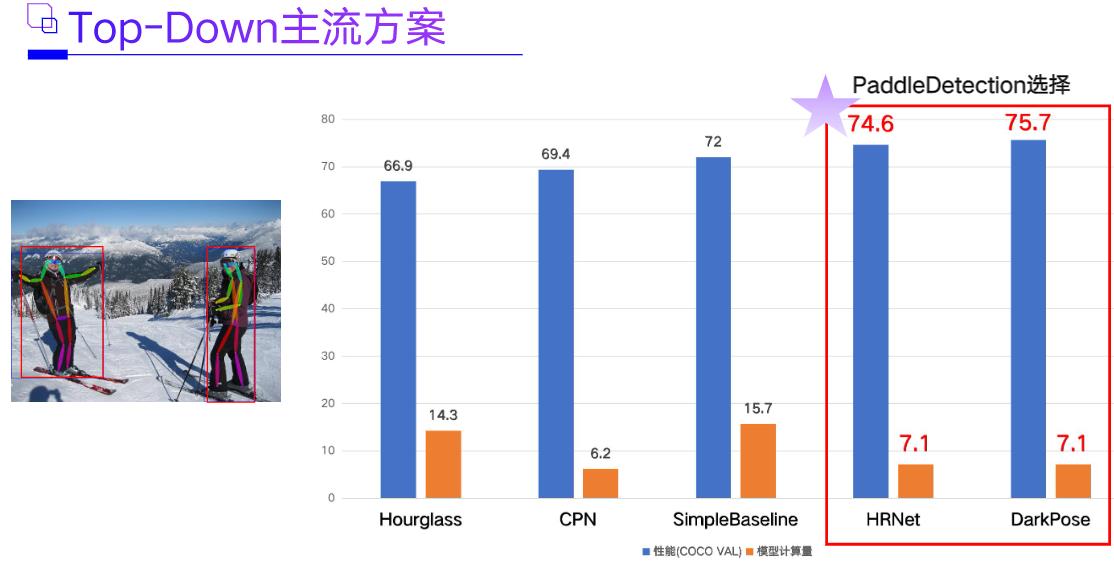
4.1.1 Top-Down主流方案

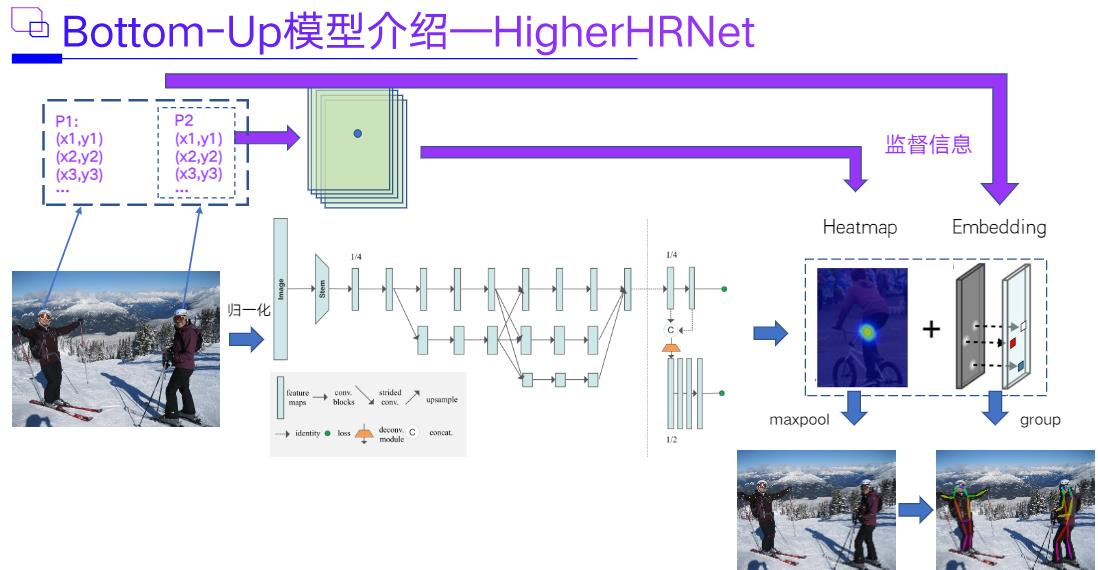
4.1.2 Bottom-Up主流方案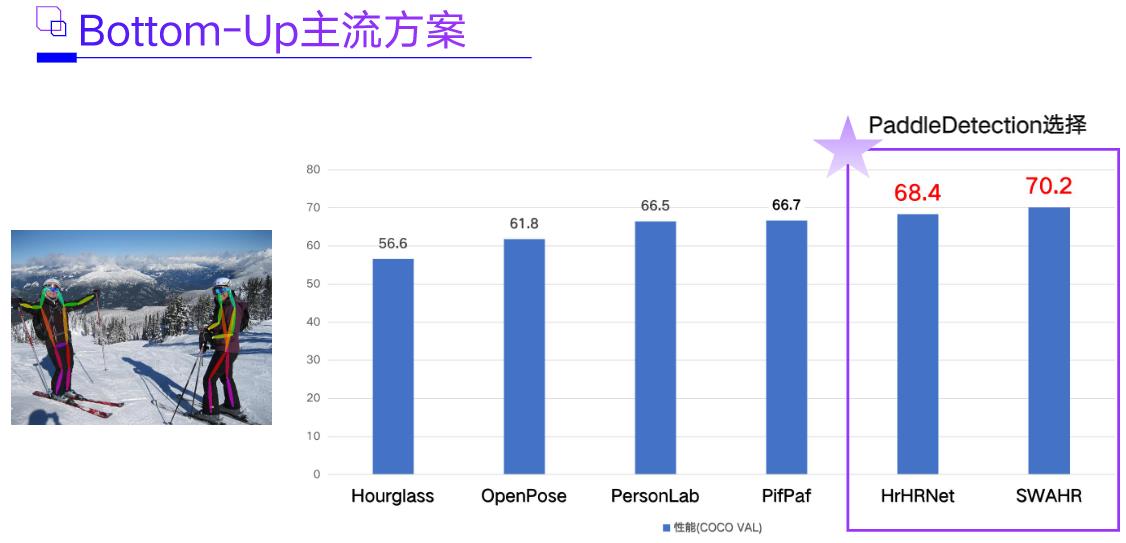
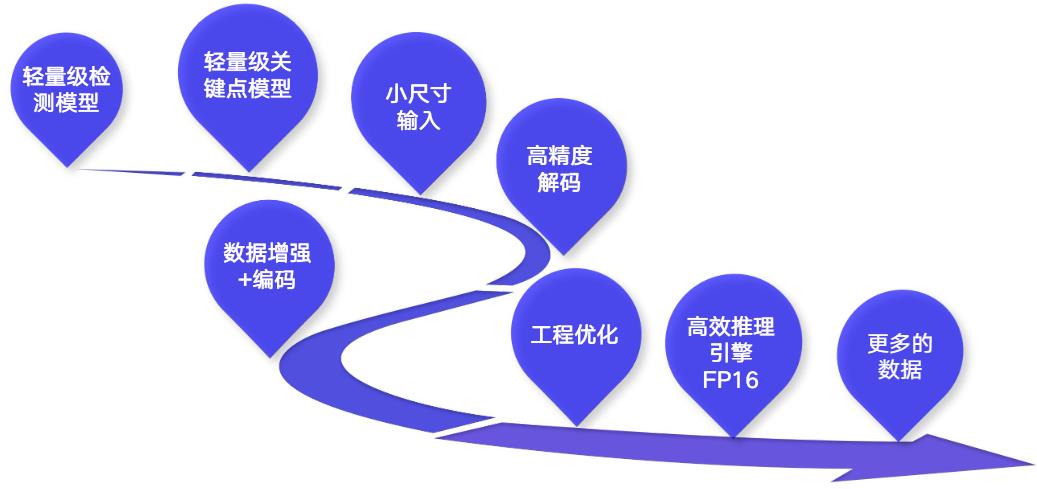
4.2 轻量级关键点算法优化
4.2.1 优化思路
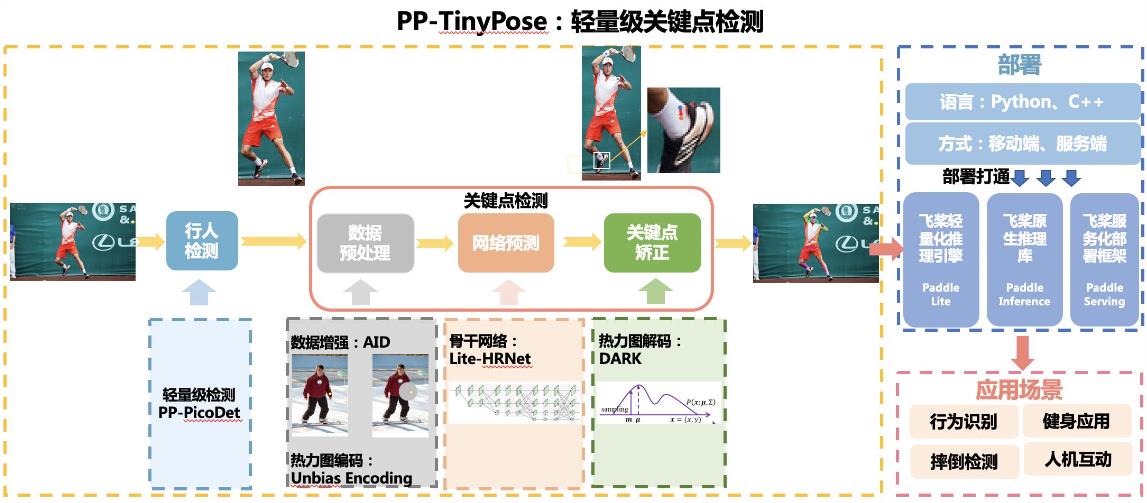
4.2.2 算法框架
4.2.3 热力图(Heatmap)处理流程
1)获取待处理的目标图像,将它输入至神经网络模型的编码模块进行编码处理,得到预测热力图
2)将第1)步输出的热力图输入至神经网络模型的解码模块,通过积分求取热力图的均值坐标和坐标偏移量
3)根据第2)步输出的均值坐标和坐标偏移量确定关键点在目标图像上的坐标位置
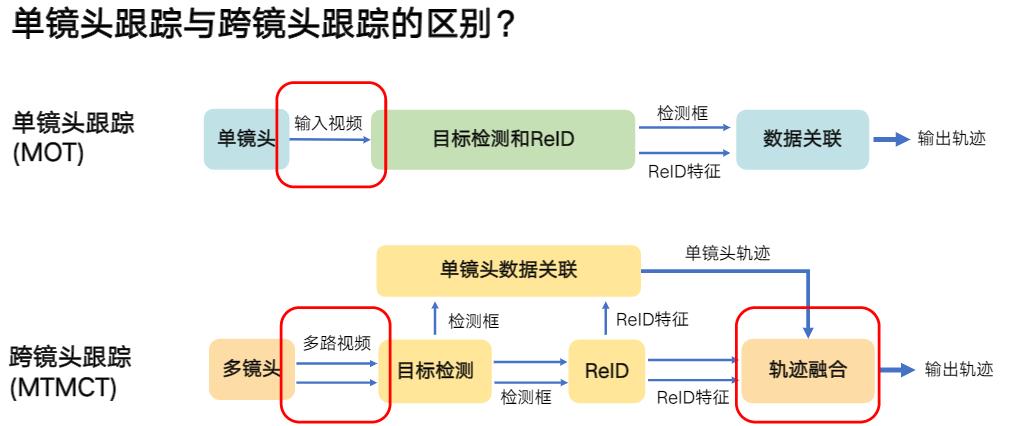
5. 多目标跟踪(MOT: Multiple Object Tracking)
5.1 简介


5.2 MOT算法
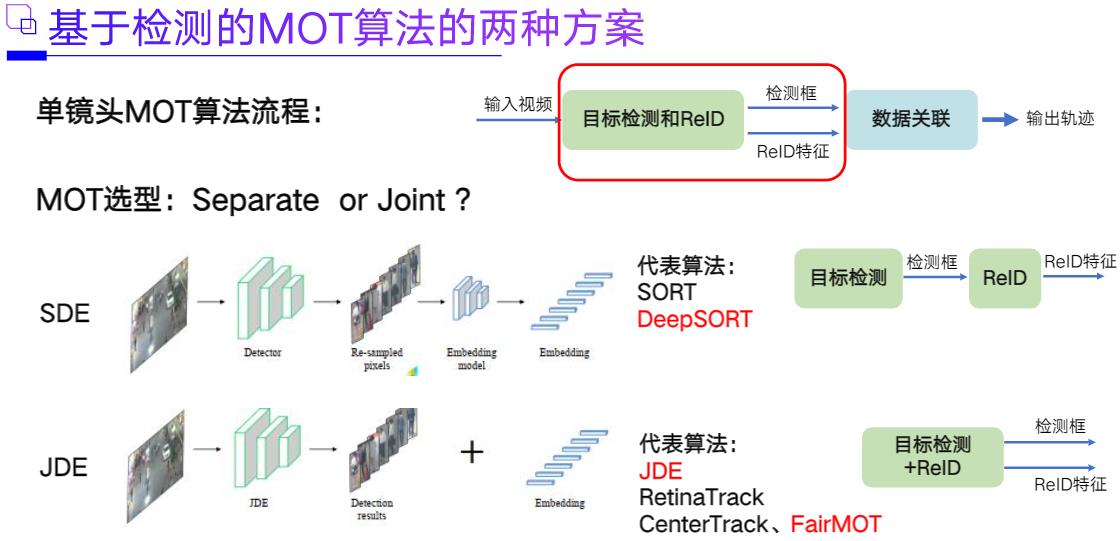
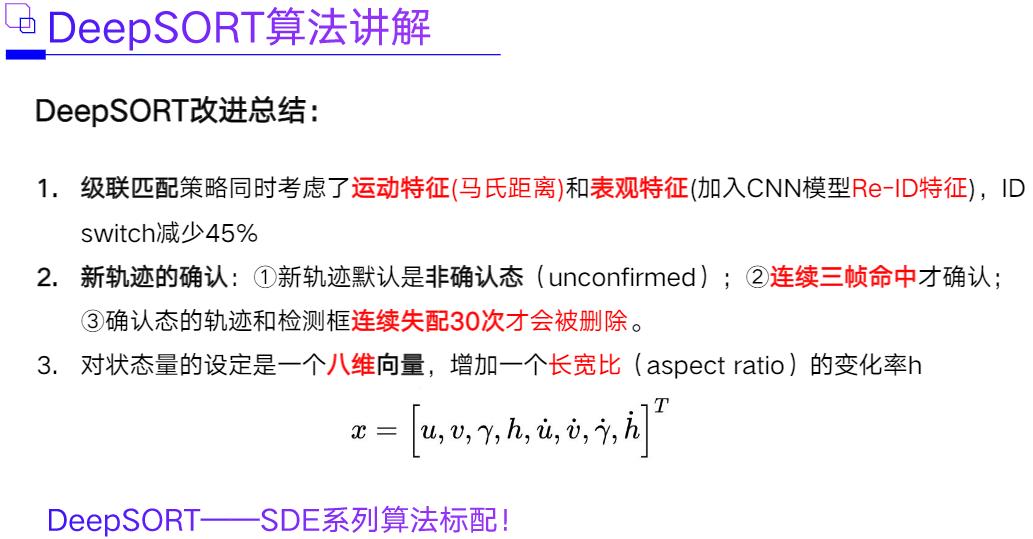
5.2.1 SDE算法 (先目标检测再ReID)
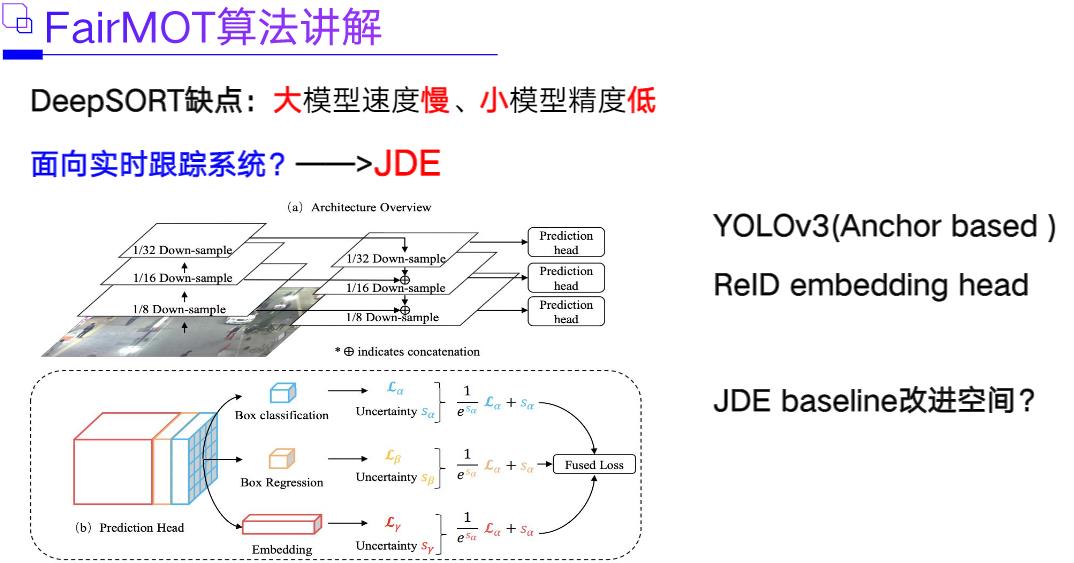
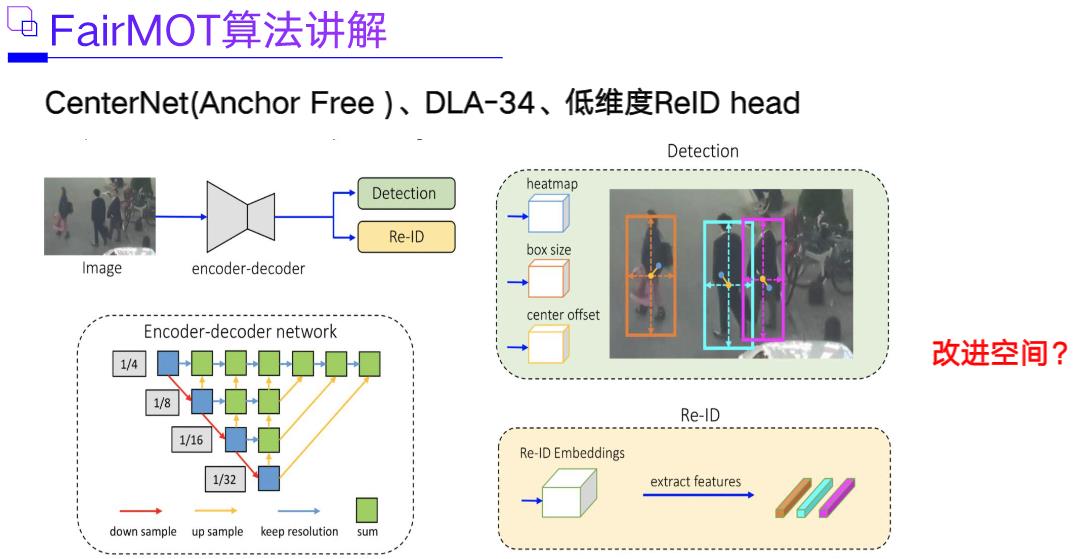
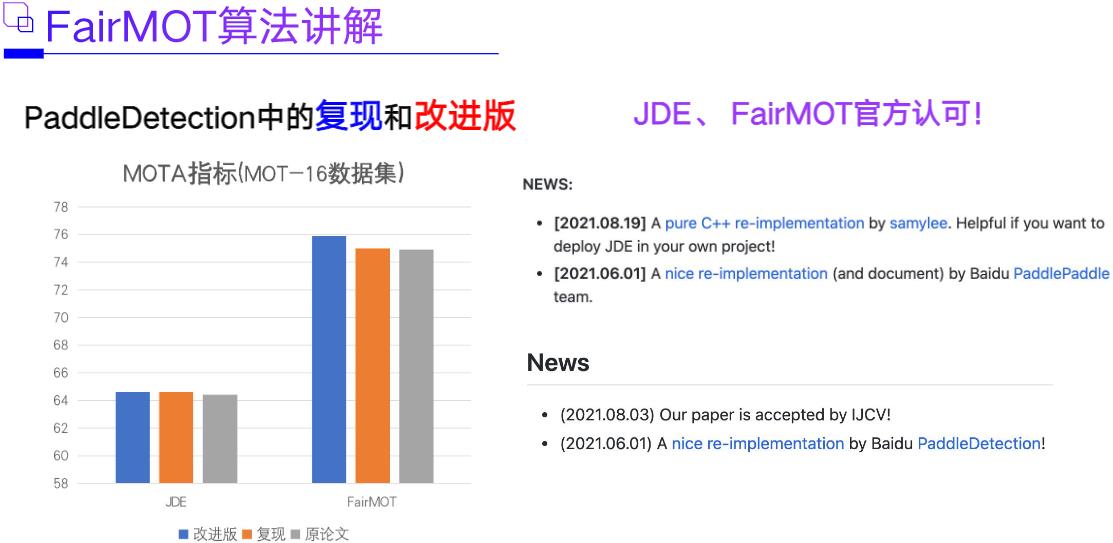
5.2.2 JDE算法(同时进行目标检测和ReID)


5.2.3 MOT算法选型

6. 跨镜跟踪
- 跨镜跟踪:是对同一场景下的不同摄像头拍摄的视频进行多目标跟踪。
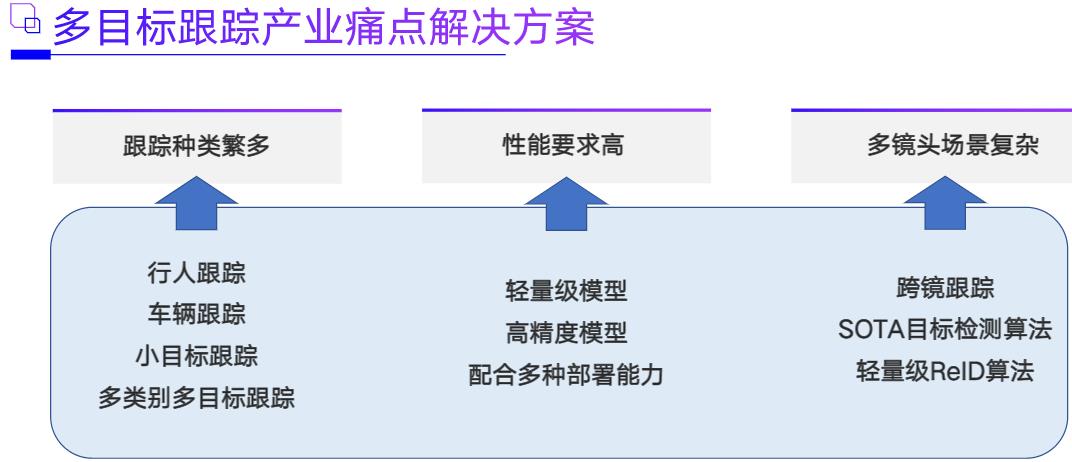
6.1 跨镜跟踪产业应用难点

6.2 跨镜跟踪算法选型

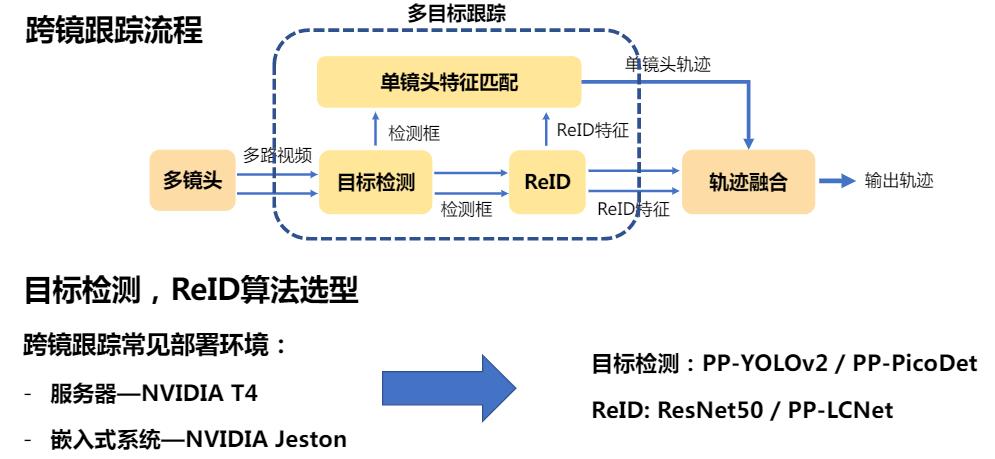
6.2.1 目标检测算法选型
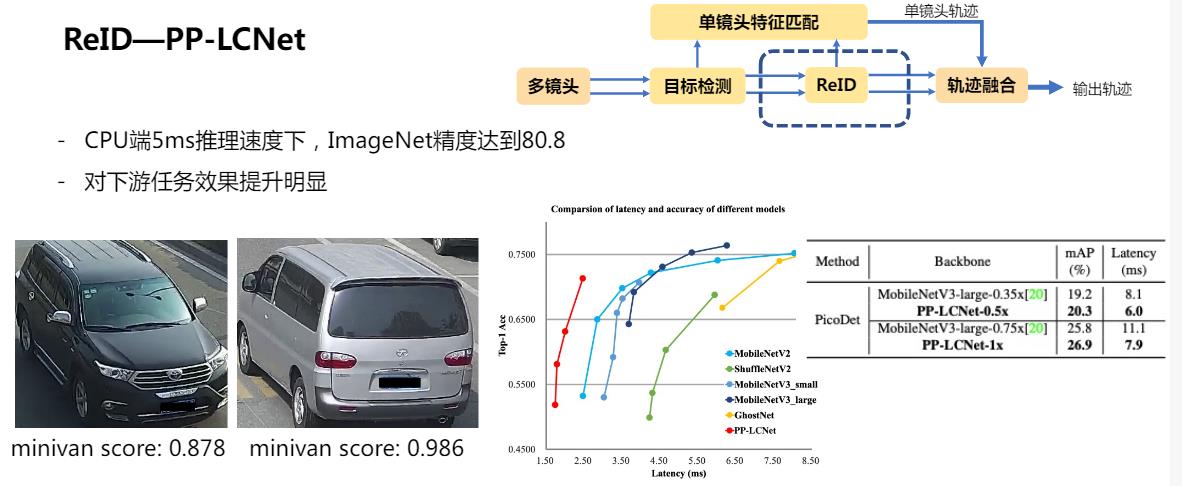
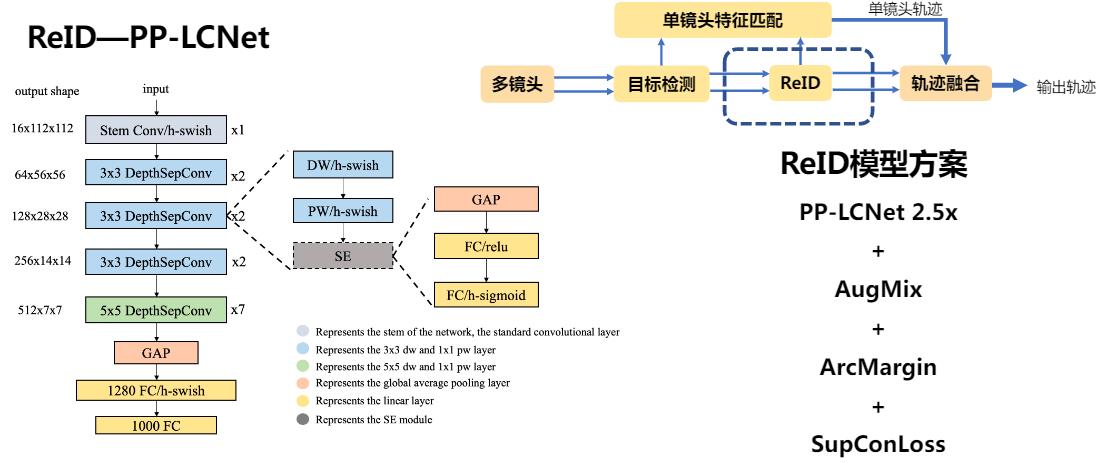
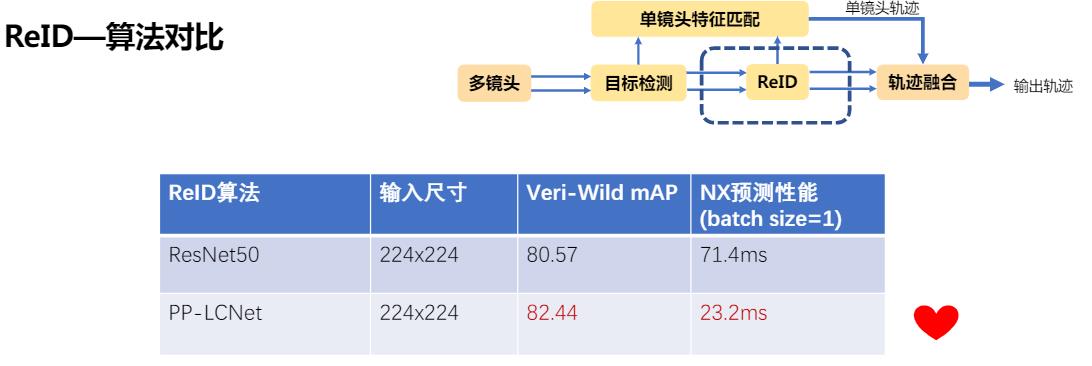
6.2.2 ReID算法选型
6.2.3 匹配算法
6.2.4 轨迹融合


6.3 跨镜跟踪整体方案

以上是关于多目标跟踪(MOT/MTT)的主要内容,如果未能解决你的问题,请参考以下文章