自动驾驶规划控制软硬一体化控制器解决方案
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶规划控制软硬一体化控制器解决方案相关的知识,希望对你有一定的参考价值。
随着社会的进步,汽车工业和电子科技发展迅速,车载电子器件的数量越来越多,汽车 电子的平台集成度越来越高,两者的融合正在革新着人们的驾乘体验。本文基于 x86 SoC 进 行系统设计,实现高效的汽车智能驾驶舱技术和高级驾驶辅助系统,降低用户总体成本。 本文主要工作如下: 一、调查了车载系统的国内外行业现状和发展趋势,对主流车载控制厂商和主要一级供 应商的方案进行分析,指出目前智能驾驶舱车载系统的优点与不足,对设计中的关键技术进 行阐述,提出本系统设计的整体架构和方案。 二、对智能驾驶舱和高级驾驶辅助系统的硬件架构和安全模式进行研究,设计车载计算 机系统的硬件架构方案,包括核心主控系统、输入输出控制系统、显示模块、全景摄像模块 和存储模块等各子功能模块,提出了 360 度全景摄像头和双屏后座娱乐显示子模块解决方案。 系统实现了智能驾驶舱和高级驾驶辅助系统平台的主控计算机功能。 三、在软件方面,采用虚拟化技术,以一个总体的硬件平台无缝支持车载信息娱乐系统 (IVI) 、数字仪表 (Cluster) 、后座娱乐双屏显示以及车载导航仪等多个高清屏幕的使用和互动, 提升用户体验和降低系统风险。 本文实现了完整的智能驾驶舱和高级驾驶辅助系统。通过对系统整体与各子模块的测试, 验证了系统的各项预期功能指标,具备良好的推广价值和应用前景。对标:

实现:

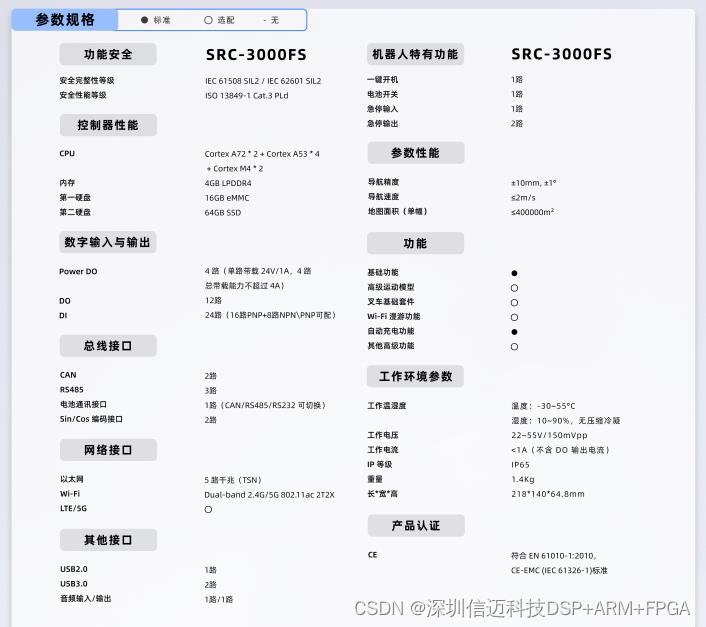
Intel Mobile 6代 I7/I5/I3 TDP 45W/FCBGA1140
3*RS232/2xRS485或 RS422/5*USB3.0/4*USB2.0/4*LAN/1*MSATA/1*5G、1*Wifi(M.2接口)/2*CAN VGA/HDMI
1.1 产品简介
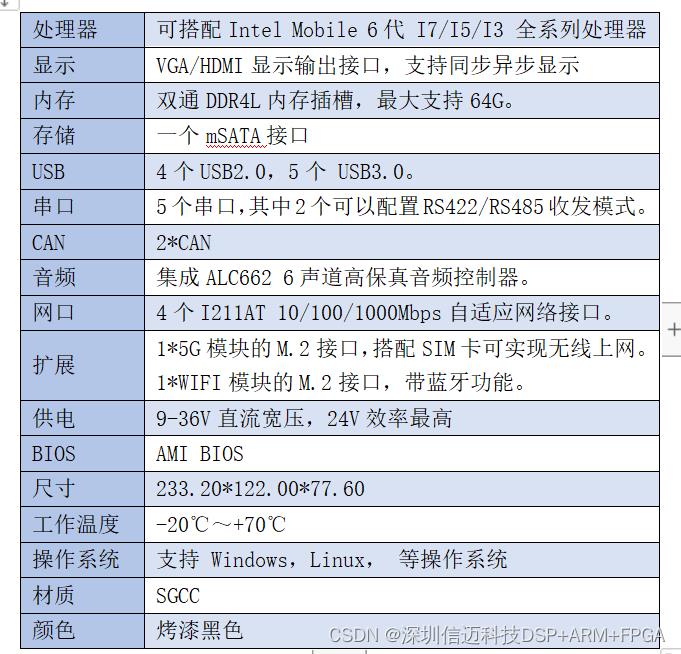
XM-5132是我司在116*207㎜尺寸上研发生产的嵌入式工业级主板,可搭配Intel Mobile 6代 I7/I5/I3 全系列处理器,具有超强的图形处理能力及应用计算能力,双通DDR4,最大支持64GB。集成英特尔® 530核芯显卡,支持VGA、HDMI显示输出,提供4个Realtek I211千兆网卡,提供1*5G和1*WIFI功能的M.2接口,搭配SIM卡可实现无线上网。4个USB2.0,5个 USB3.0。1个mSATA接口。集成ALC662 6声道高保真音频控制器。
6层PCB板叠层设计,增加了其电磁干扰和电磁兼容方面的能力。XM-5132以其超强的功能和稳定性,可广泛应用于数控机床,电力电气,设备监控﹑网络终端﹑仪器仪表﹑媒体播放等各种嵌入式领域。本机工业级产品可在温度-10℃~70℃、0%~90%相对湿度, 无凝露的宽湿、温度范围内稳定工作,满足工业级产品的各种应用需求,该产品兼具了稳定可靠的工业级产品性能和智能化数字多媒体播放器的优势,可广泛应用于广告、教育、媒体播放、LCD大屏、交通控制、信息系统、金融设备、汽车、军工等行业。
本机消除不必要的特性和费用、加速生产、快速部署和集成、减少系统停机时间和维护成本,以及对未来升级和扩展的支持。可以方便地对平台功能进行扩展和定制,从而满足客户特定应用的需求。
本机可在温度-20-60℃、0% ~ 90%相对湿度, 无凝露的宽湿、温度范围内稳定工作,满足工业级产品的各种应用需求。消除不必要的特性和费用、加速生产、快速部署和集成、减少系统停机时间和维护成本,以及对未来升级和扩展的支持。可以方便地对平台功能进行扩展和定制,从而满足客户特定应用的需求和面向未来的解决方案。
1.2 特征
XM-5132可搭配Intel Mobile 6代 I7/I5/I3 全系列CPU主要特征如下;
- 双通DDR4L内存插槽,最大支持64G。
- VGA/HDMI显示输出接口,支持同步异步显示。
- 4个I211AT 10/100/1000Mbps自适应网络接口。
- 支持5个串口,其中2个可以配置能RS422/RS485收发模式。
- 2个CAN。
- 4个USB2.0,5个 USB3.0。
- 集成ALC662 6声道高保真音频控制器。
- 一个标准mSATA接口。
- 提供1个5G模块的 M.2接口,搭配SIM卡可实现无线上网。
- 1个WIFI功能的M.2接口,附带蓝牙功能。
- CPU_FAN接口外置,方便更换风扇。
- 9-36V直流宽压,24V效率最高。
* 可应客户要求,裁减部分功能,以满足客户的实际需求。

外观:

规格:
以上是关于自动驾驶规划控制软硬一体化控制器解决方案的主要内容,如果未能解决你的问题,请参考以下文章