CAN 总线 之三 CAN 国际标准 ISO 11898 解读
Posted 贺二公子
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了CAN 总线 之三 CAN 国际标准 ISO 11898 解读相关的知识,希望对你有一定的参考价值。
原文地址:https://itexp.blog.csdn.net/article/details/90671414
文章目录
从 1993 第一个版 CAN 国际标准(ISO 11898:1993 和 ISO 11519-2)发布至今,ISO 11898 逐渐被分割整合成了相互独立的 6 个部分。分别以 Part 1 ~ Part 6 来标识。在旧版本(2003年之前)中
- ISO 11898 是通信速度为 5kbps - 1Mbps 的 CAN 高速通信标准。规范中同时定义了 数据链路层和高速物理层。
- ISO 11519 是通信速度为 125kbps 以下的 CAN 低速通信标准,也就是容错CAN(LSFT CAN)。提供从5 Kbit/s到125 Kbits/s的波特率。该标准允许在CAN总线连线失败时CAN总线通信得以继续进行。
从 2003 年开始,ISO 将原先的 ISO 11898 CAN标准的数据链路和高速物理层的标准分离为 ISO 11898-1 和 ISO 11898-2 两部分。后续又发布了其他几个部分!在 2016 年,又再一次进行了整合。下图是 2016 年之前各部分的官方命名(来自于 ISO 11898-1-2015 的 Foreword 章节):
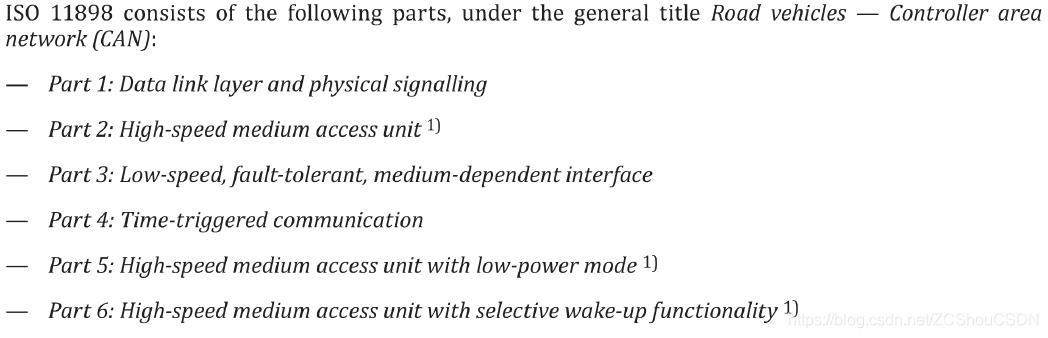
在经过审核和重组的 ISO 11898 系列中,各部分的功能如下:
- Part 1: defines the data link layer including the logical link control (LLC) sub-layer and the medium access control (MAC) sub-layer, as well as the physical signalling (PHS) sub-layer; 定义数据链路层,包括逻辑链路控制(LLC)子层和媒体访问控制(MAC)子层,以及物理信令(PHS)子层;
- Part 2: defines the high-speed physical medium attachment (PMA); 高速物理媒体附属层
- Part 3: defines the low-speed fault-tolerant physical medium attachment (PMA); 低速容错物理媒体附属层
- Part 4: defines the time-triggered communication; 时间触发通讯
- Part 5: defines the power modes of the high-speed physical medium attachment (PMA); 低功耗的物理媒体附属层
- Part 6: defines the selective wake-up functionality of the high-speed physical medium attachment (PMA). 选择性唤醒的物理媒体附属层
啥是 PMA ??:将物理信号转换为逻辑信号或者将逻辑信号转换为物理信号的子层
在 2016 年,其中的 Part 2、Part 5 和 Part 6 被合并成了一个新的 Part 2,即:ISO 11898-2-2016。 下图显示了 ISO 11898 标准,对比 OSI 模型的分布情况
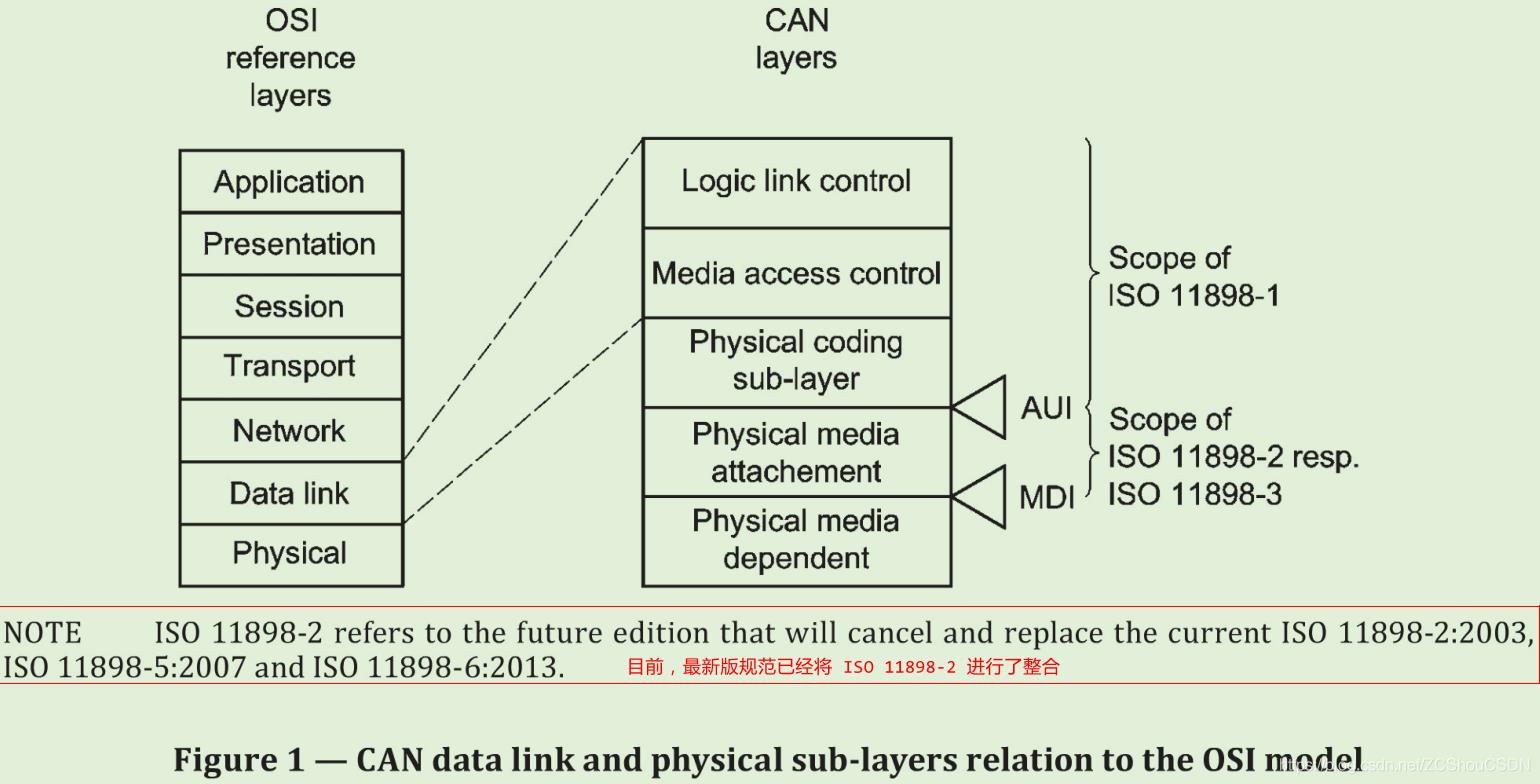
AUI attachment unit interface
MDI media dependant interface
OSI open system interconnection
CAN 总线(ISO 11898-1)最初指定的链路层协议仅包括对物理层的抽象需求。 高速物理层关于电气方面的(电压,电流,数量导体)规定来自于 ISO 11898-2,该协议目前被广泛接受;低速则在 ISO 11898-3 中。但是,物理层关于机械方面的(接头种类和数量、颜色、标签、标准输出)并没有标准文档来正式指定。 因此,汽车的电子控制单元(ECU)通常会有定制的接口和各种线缆组成 CAN 总线。
各部分标准文档在不同年份下还有不同的版本。根据 ISO 的惯例,新版发布后,旧版就会被撤销。下面通过 ISO 官方网站对于各时期标准的发布情况详细说明一下:
-
ISO 11898:1993 和 ISO 11898:1993/Amd 1:1995: 从下图可以看到, ISO 11898:1993 是 CAN 标准的第一个版本,到 2003 年被分成了两部分。随着新版本的发布,这些都已经被 ISO 撤回了。

-
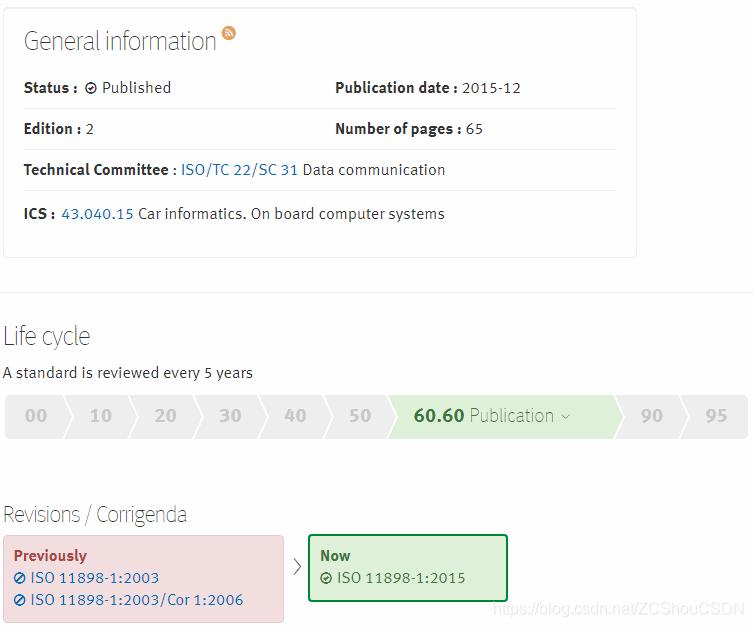
ISO 11898-1-2003 和 ISO 11898-1-2015: ISO 11898-1-2015 是 ISO 11898-1-2003 的最新修订版本, 全名为 ISO 11898-1:2015 Road vehicles – Controller area network (CAN) – Part 1: Data link layer and physical signalling 指定经典 CAN 帧格式和新引入的CAN FD 帧格式。 经典 CAN 帧格式允许比特率高达1 Mbit/s,有效载荷最高可达每帧 8 字节。 CAN FD 帧格式允许比特率高于 1 Mbit/s,有效载荷超过每帧 8 字节。
ISO 11898 的这一部分根据 ISO/EC 7498-1 的开放系统互连(OSI)的 ISO 参考模型,以分层的方式描述了CAN 的通用结构。CAN数据链路层根据 ISO/EC 8802-2 和 ISO/EC 8802-3 规定。包含以下详细规范:
-逻辑链路控制子层(LLC)- 媒体访问控制子层(MAC)
- 物理编码子层(PCS)
更详细的内容,后续再详细介绍,这里不再多说!
(1)这部分综合了 Bosch CAN 2.0 规范 和 Bosch CAN FD
(2)ISO 11898-2 和 ISO 11898-3 共用 ISO 11898-1。也就是 ISO 11898-1 规定的数据链路层是共用的!
(3)从 2003 开始,ISO 11898-1 不再包含 高速物理层的相关定义,这部分被独立到了ISO 11898-2 中 -
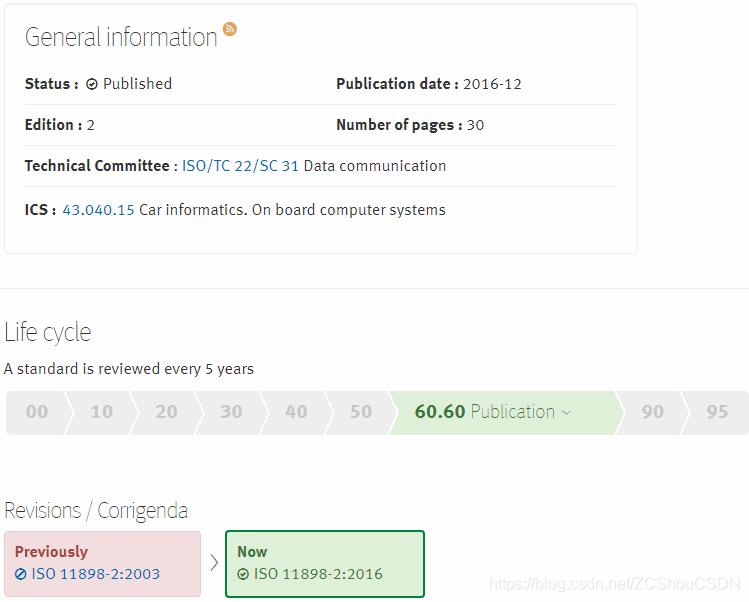
ISO 11898-2-2003 和 ISO 11898-2-2016: ISO 11898-2-2016 是 ISO 11898-2-2003 的最新修订版本,全名为 ISO 11898-2:2016 Road vehicles – Controller area network (CAN) – Part 2: High-speed medium access unit。 此外,11898-5:2007 和 11898-6:2013 被整合到 11898-2:2016 之中,原有的 11898-5:2007 和 11898-6:2013 被撤回。
Part 2 指定了controller area network (CAN) 的高速物理媒体附属层(HS-PMA),包括没有和具有低功耗模式功能以及具有选择性唤醒功能的 HS-PMA(High-Speed Physical Media Attachment) 。依赖于物理媒体的子层不在本文档的范围内。
此外,具体内容如下:- HS-PMA 测试电路
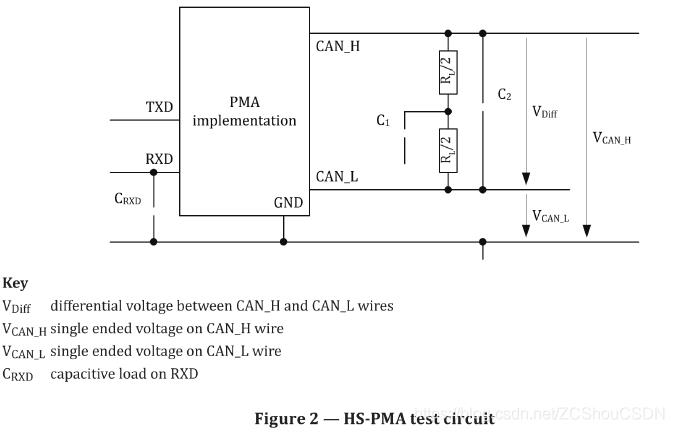
- 基于以上定义,定义了收发器的电器特性

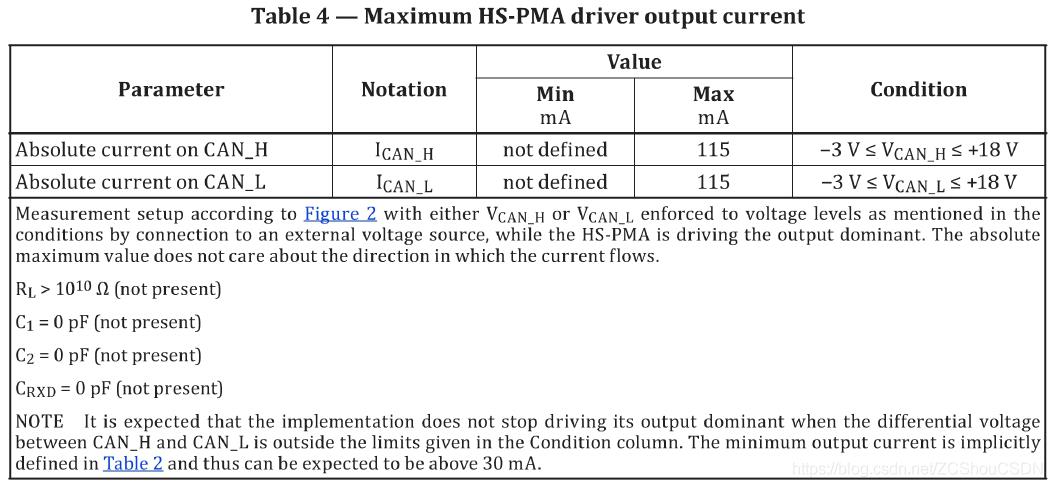
其他图见规范,这里不再贴了。 - 定义CAN_H / CAN_L上的最大输出电流;
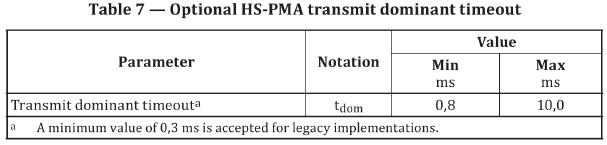
- 定义可选的 TXD 超时
- 接收器输入电阻范围已经改变
- 已定义 CAN FD 的位时序参数,最高可达 2 Mbps;
- 定义 CAN FD 的位时序参数,最高可达5 Mbps
- 已经集成了ISO 11898-5和ISO 11898-6的内容,以确保所有HS-PMA实施都有一个ISO标准;
- 选择性唤醒(以前的ISO 11898-6)已定义CAN FD 容差;
- 唤醒滤波器时序(以前在ISO 11898-5中)已经改变
- 有关 PMD 子层的要求和假设已转移到附件A,以明确关注 HS-PMA 的实施。
这部分不是 Bosch CAN 2.0 规范的一部分
从 2003 年开始,从 ISO 11898-1 中 独立出来的 - HS-PMA 测试电路
-
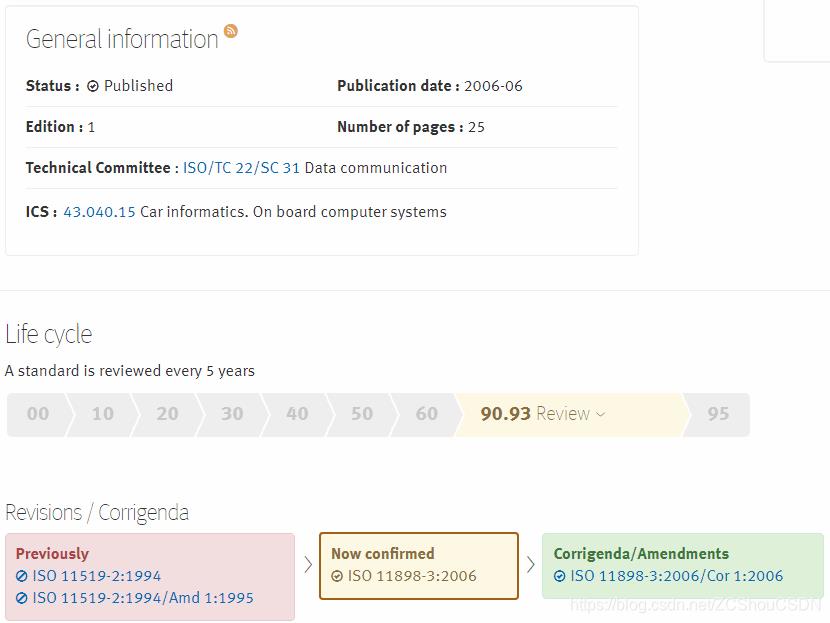
ISO 11898-3-2006 和 ISO 11898-3:2006/Cor 1:2006: 全名为 ISO 11898-3:2006 Road vehicles – Controller area network (CAN) – Part 3: Low-speed, fault-tolerant, medium-dependent interface 规定了在配备 CAN 的公路车辆的电子控制单元之间建立数字信息交换的特性,传输速率为 40 kBit/s 至 125 kBit/s。其取代了最早发布的 ISO 11519-2:1994。ISO 11898-3:2006/Cor 1:2006 为勘误和修改版本。
ISO 11898的这一部分描述了低速CAN应用的容错行为,以及根据ISO / OSI层模型的物理层的部分。 ISO 11898 的这一部分涵盖了物理层的以下部分:- medium dependent interface (MDI);
- physical medium attachment (PMA).
此外,物理层信令(PLS)的部分和媒体访问控制(MAC)的部分也受到 ISO 11898 的这一部分提供的定义的影响。
OSI 模型的所有其他层在 CAN 协议中没有对应部分,并且是用户级别的一部分,不影响低速 CAN 物理层的容错行为,因此不属于 ISO 11898 的这一部分。这部分不是 Bosch CAN 2.0 规范的一部分
-
ISO 11898-4-2004: 全名为 ISO 11898-4:2004 Road vehicles – Controller area network (CAN) – Part 4: Time-triggered communication 指定CAN中的时间触发通信。该标准最后一次审查并于2019年确认。因此该版本仍然是最新版本。
这部分不是 Bosch CAN 2.0 规范的一部分
参考
- History of CAN technology
- CAN bus - Wikipedia
- http://home.eeworld.com.cn/my/space-uid-469267-blogid-224148.html
- https://www.edaboard.com/showthread.php?217912-Difference-between-CAN1-0-and-CAN-2-0
- CAN FD协议介绍
附件
以上是关于CAN 总线 之三 CAN 国际标准 ISO 11898 解读的主要内容,如果未能解决你的问题,请参考以下文章