小作品STM32无线WIFI视频小车制作剖析(上)
Posted arvik
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了小作品STM32无线WIFI视频小车制作剖析(上)相关的知识,希望对你有一定的参考价值。
实体作品请参看优酷视频。
若以上链接点击无效请把该链接地址复制到浏览器地址栏 http://v.youku.com/v_show/id_XODYzODczNzQ4.html
说明:
该作品为arvik于2014年下半年在学校实验室做的一个国家级大学生科技创新项目,大概花了两个多月课余时间完成。
其实博客早在几个月前就写好了,一共3篇,后来发现第一篇丢失。本想补起来,却没有时间,且实际作品早已拆开,保留在学校“博物馆”,没办法重新试验了,就不补了。
介绍
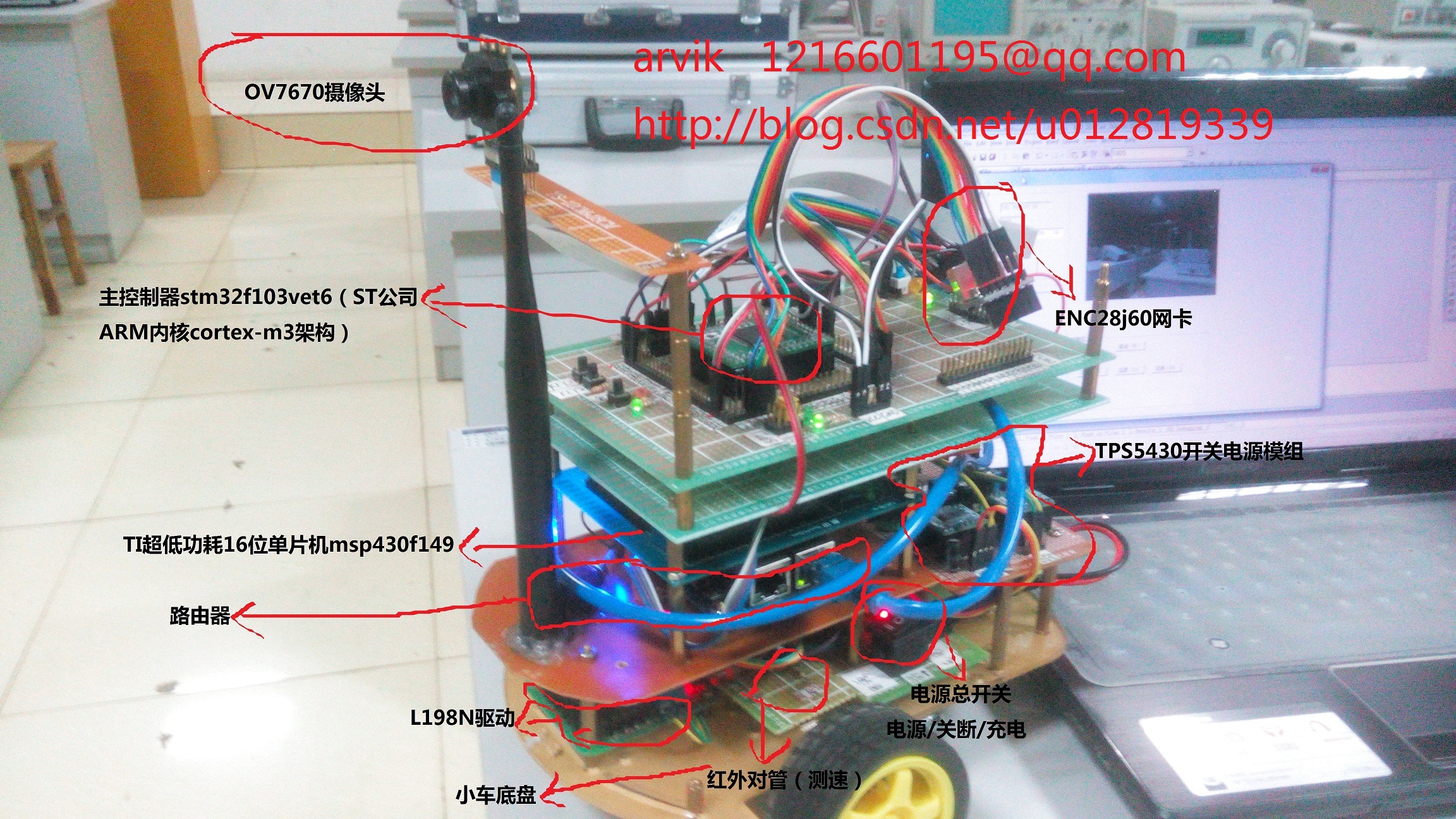
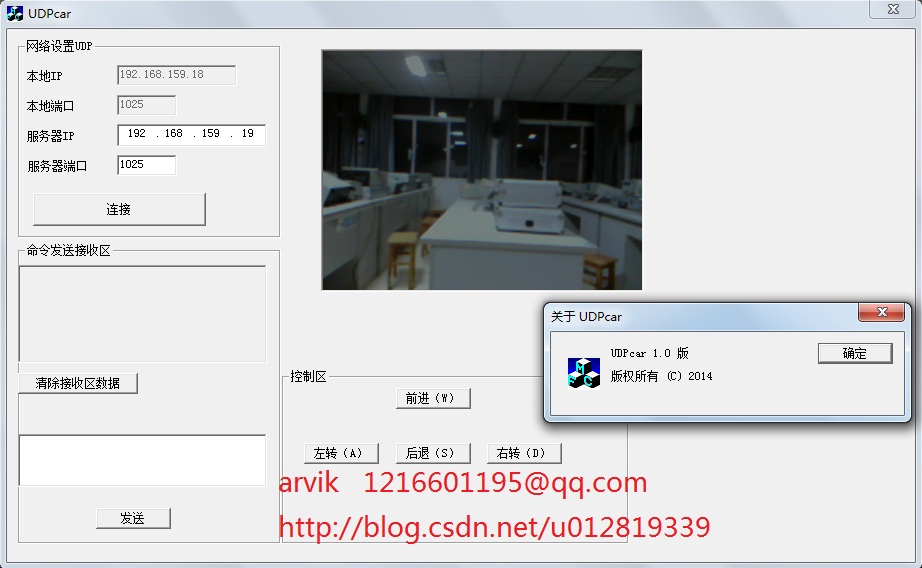
WiFi小车(简要说明:小车由msp430和stm32f103vet6两个单片机协调控制,msp430负责控制小车运动方向和开关电源的管理,stm32f103vet6负责视频数据的采集与传输,摄像头是ov7670,网卡采用enc28j60,移植的lwip协议,两款单片机均由ucos-ii进行任务管理。上位机控制平台由VC++6.0编写,可接收并显示视频数据,通过键盘W、A、S、D键来控制小车的行动)

作品图片展示
整体介绍图:
作品图(小车 + 上位机):

PC控制端:
软件部分
软件主体框图:
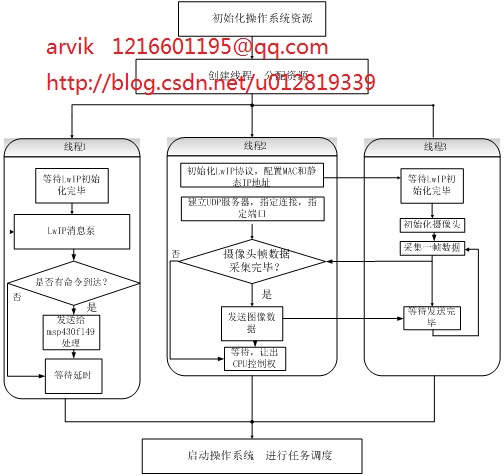
主控器STM32F103VET6软件构架框图
主控器移植了UC/OS-II嵌入式实时操作系统,启动系统,初始化LWIP后,设置网卡MAC,静态配置IP地址,启动摄像头,采用UDP协议将视频数据发送出去,同时将接受到的命令送往从控器。
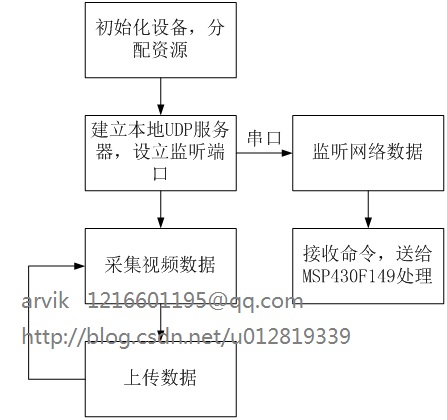
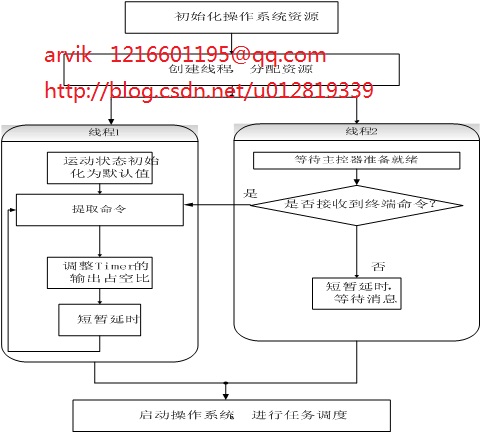
从控器MSP430F149软件构架框图
控制器MSP430F149搭载UC/OS-II操作系统管理整个系统的运行状态和资源分配。利用MSP430F149的timerB输出四路PWM波控制小车整体行进速度及运动方向。
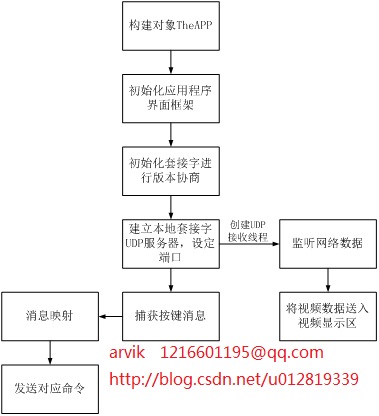
PC机控制台软件框图
控制台在VC环境下搭建, VC平台设备所采用的开发工具是Visual C++6.0。
硬件部分
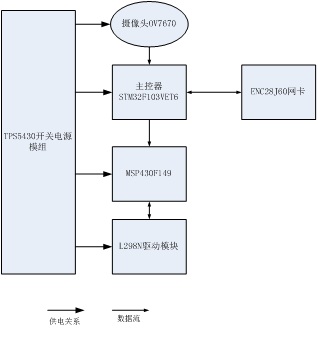
该小车硬件部分总体框图:
电机驱动
小车用到了特别常用的L298N电机驱动电路,控制器msp430f149通过timerB输出四路PWM波控制小车前后左右行动,原理图如下:
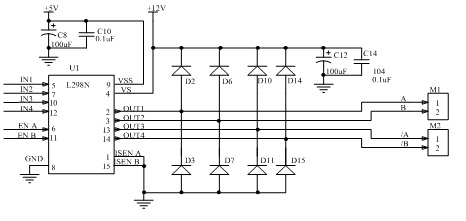
利用MSP430f149的timerB输出不同占空比的PWM信号以实现电机正反转及速度调节。电机的额定电压为5V到8V,系统分配给L298N的驱动电压为8V,故需设定PWM波占空比为62.5% 到100% 时电机才能正常工作,参看msp430f149数据手册以了解怎样让timerB输出PWM波,此处不做介绍。
测速模块
用红外对管和一个比较器组成测速电路,控制器单位时间内采集模块的输出脉冲,即可实现测速,原理图如下:
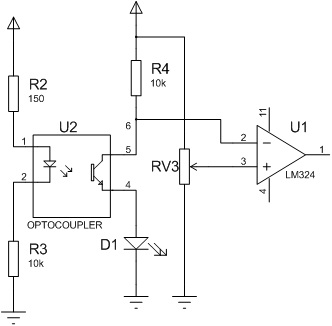
该模块较为简单,有数模电基础都能看懂。
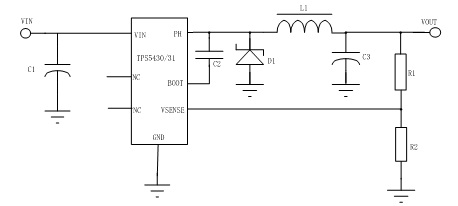
开关电源
采用TI公司高效率的TPS5430芯片作为开关电源模块组的核心芯片,可使电源的利用率及效率最大化。TPS5430芯片具有5.5V至36V的宽输入电压,上至3A的输出电流,500kHZ的开关频率,转换效率可高达95%,极低的输出电压波纹,可软开关。

典型应用电路:
该模块给系统提供了8V、5V、3.3V三种电压,参看TI公司TPS5430数据手册,得出相应电路参数计算如下(CSDN的公式编辑不会,还是来个截图吧):
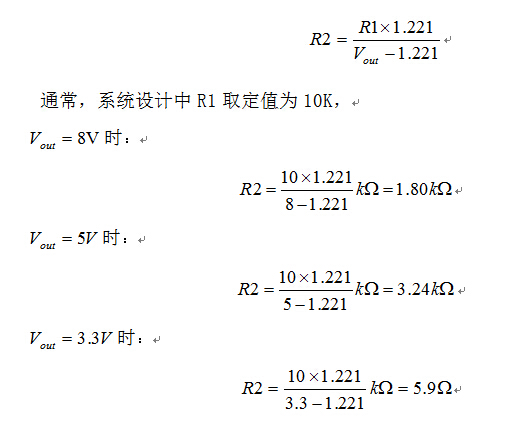
详细元件参数选取请查看TPS5430数据手册
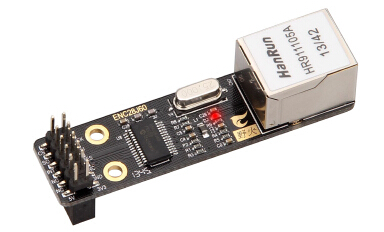
摄像头,网卡
某宝上随便淘一个型号相同的摄像头和网卡模块就行:

摄像头模块(OV7670)通过SCCB总线控制,可以输出整帧、取窗口、子采样方式的各种分辨率为8位图像数据。
ENC28J60是带有行业标准带SPI接口的独立以太网控制器。 该芯片可作为任何配备有 SPI 控制器的以太网接口。
这里并不对以上两个模块做详细说明,需自行参考相关资料及数据手册。
后续内容请参看下节!
以上是关于小作品STM32无线WIFI视频小车制作剖析(上)的主要内容,如果未能解决你的问题,请参考以下文章