Weiler-Atherton算法 计算机图形学多边形裁剪算法
Posted kaka0010
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Weiler-Atherton算法 计算机图形学多边形裁剪算法相关的知识,希望对你有一定的参考价值。
目录
源代码: https://github.com/ricar0/Weiler-Atherton-Alogrithm/tree/master
什么是多边形裁剪
通常来说就是利用多边形来裁剪多边形的一种方法,一般情况下是利用矩形来裁剪凹凸多边形
- 凸多边形

- 凹多边形

上面红色划线部分就是裁剪出的部分
前置知识
- OPENGL基础语法
基本上就是一些画线和画多边形的操作,难度较低 - 求两直线交点
较为基础的数学知识 - 求一个点是否落在多边形内/外
计算几何知识 - Weiler-Atherton多边形裁剪算法
这里着重介绍Weiler-Atherton算法,其余不懂的可以先学会再看。
算法步骤
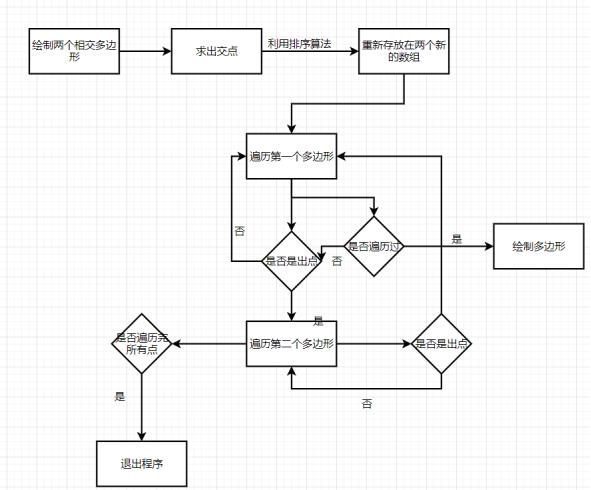
- 首先绘制两个相交的多边形
- 对于多边形1,我们从一个点出发,将所有经过的点(包含交点)存入新的数组中,对于多边形2也是同理
- 对两个新数组中的相同点进行点对映射
- 开始对裁剪多边形1进行遍历,从任意点出发,如果改点将从多边形2的内部穿越到外部,我们改变遍历点的对象,从多边形2开始遍历,依次类推…
- 直到当前点被遍历过,那么之前肯定形成了一个回路,我们将当前回路绘制出来就是裁剪出的多边形。
- 一直重复4和5操作,直到所有点都被遍历
接下来结合图片解释一下

对于如下这个图,我们利用矩形裁剪凹多边形。
首先从E点出发,判断E到J是否为出点,发现不是。遍历到J点,判断JF是否是出点,发现是,这时候改变遍历的对象,通过映射关系从K点开始。判断发现KC又是出点,因此再次改变遍历对象,遍历多边形到E,发现J已经被遍历过,这时直接绘制出JKE…
程序框图
代码实现
建立窗口以及自动调整大小
void reshape(int w, int h)
glViewport(0, 0, w, h);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(60.0, (GLfloat)w / (GLfloat)h, 0.1, 100000.0);
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
gluLookAt(0, 0, 25, 0, 0, -1, 0, 1, 0);
int main(int argc,char** argv)
glutInit(&argc, const_cast<char**>(argv));
glutInitDisplayMode(GLUT_SINGLE | GLUT_RGB);
// 初始化窗口
glutInitWindowSize(500, 500);
glutInitWindowPosition(100, 100);
glutCreateWindow(argv[0]);
init();
glutReshapeFunc(reshape);
glutDisplayFunc(display);
glutMainLoop();
建立点和线
struct Point2d
double x, y;
bool operator < (const Point2d &rhs) const
if (x==rhs.x) return y < rhs.y;
return x < rhs.x;
;
struct Line
Point2d start;
Point2d end;
;
求两条线段交点的模板,如果不存在返回-inf
inline Point2d Vector(Point2d a, Point2d b) //向量ab
return b.x - a.x, b.y - a.y ;
double dis2(Point2d a, Point2d b) //两点间的距离的平方
return (b.x - a.x)*(b.x - a.x) + (b.y - a.y)*(b.y - a.y);
double cross(Point2d A, Point2d B, Point2d P) //向量的外积
Point2d AB = Vector(A,B);
Point2d AP = Vector(A,P);
return AB.x*AP.y - AB.y*AP.x;
double dot(Point2d A, Point2d B, Point2d P) //向量的内积
Point2d AB = Vector(A,B);
Point2d AP = Vector(A,P);
return AB.x*AP.x + AB.y*AP.y;
int dir(Point2d A, Point2d B, Point2d P) //点与线段方位判定
if (cross(A, B, P) > 0) return -1;
else if (cross(A, B, P)<0) return 1;
else if (dot(A, B, P) < 0) return -2;
else if (dot(A, B, P) >= 0)
if (dis2(A, B) < dis2(A, P)) return 2;
else return 0;
return 0;
double disLine(Point2d A, Point2d B, Point2d P) //点P到直线AB的距离
return fabs(cross(A, B, P)) / sqrt(dis2(A, B));
Point2d intersection(Line u, Line v)
Point2d A1 = u.start;
Point2d A2 = u.end;
Point2d B1 = v.start;
Point2d B2 = v.end;
if (dir(A1, A2, B1)*dir(A1, A2, B2) <= 0 && dir(B1, B2, A1)*dir(B1, B2, A2) <= 0) //判断有无交点
double t = disLine(A1, A2, B1) / (disLine(A1, A2, B1) + disLine(A1, A2, B2));
Point2d B1B2 = Vector(B1, B2);
Point2d inter = B1.x + B1B2.x*t, B1.y + B1B2.y*t ;
return inter.x, inter.y;
else
return -inf, -inf;
求两点距离,用于排序
double dis(Point2d point1, Point2d point2)
return sqrt((point1.x-point2.x)*(point1.x-point2.x) + (point1.y-point2.y)*(point1.y-point2.y));
判断点是否落在多边形内,这里加了个误差0.001
bool isPointInsidePoly(Point2d P,const vector<Point2d>& polyVertices)
std::size_t vertCount = polyVertices.size();
if (vertCount < 2)
return false;
Point2d tmp = P;
for (int l = 0; l < 2; l++)
for (int r = 0; r < 2; r++)
P = tmp;
if (l % 2) P.x += 0.001;
else P.x -= 0.001;
if (r % 2) P.y += 0.001;
else P.y -= 0.001;
bool inside = false;
for (unsigned i = 1; i <= vertCount; ++i)
const Point2d &A = polyVertices[i - 1];
const Point2d &B = polyVertices[i % vertCount];
if ((B.y <= P.y && P.y < A.y) || (A.y <= P.y && P.y < B.y))
double t = (P.x - B.x) * (A.y - B.y) - (A.x - B.x) * (P.y - B.y);
if (A.y < B.y)
t = -t;
if (t < 0)
inside = !inside;
if (inside) return inside;
return false;
求交点以及重新放入数组
void getIntersections() //求出所有交点以及按照顺序存放在新数组中
int len1 = poly1.size();//求出new1
for (int i = 0; i < len1; i++)
new1.push_back(poly1[i]);
vector<Point2d> tmp;
for (auto it2 : p2)
Point2d p = intersection(poly1[i].x, poly1[i].y,poly1[(i+1)%len1].x, poly1[(i+1)%len1].y, it2);
if (p.x != -inf && p.y != -inf) tmp.push_back(p.x, p.y);
sort(tmp.begin(), tmp.end(), [&](Point2d p1, Point2d p2)
return dis(p1, poly1[i]) < dis(p2, poly1[i]);
);
for (auto it : tmp) new1.push_back(it);
int len2 = poly2.size();//求出new2
for (int i = 0; i < len2; i++)
new2.push_back(poly2[i]);
vector<Point2d> tmp;
for (auto it2 : p1)
Point2d p = intersection(poly2[i].x, poly2[i].y,poly2[(i+1)%len2].x, poly2[(i+1)%len2].y, it2);
if (p.x != -inf && p.y != -inf) tmp.push_back(p.x, p.y);
sort(tmp.begin(), tmp.end(), [&](Point2d p1, Point2d p2)
return dis(p1, poly2[i]) < dis(p2, poly2[i]);
);
for (auto it : tmp) new2.push_back(it);
for (int i = 0; i < new1.size(); i++) //映射关系,给定eps为误差范围
for (int j = 0; j < new2.size(); j++)
if (fabs(new1[i].x-new2[j].x)<eps&&fabs(new1[i].y-new2[j].y)<eps)
pos1[i] = j;
pos2[j] = i;
work();
绘制两个多边形以及初始化操作
void prework()
p1.clear();
p2.clear();
new1.clear();
new2.clear();
vis1.clear();
vis2.clear();
pos1.clear();
pos2.clear();
void display()
prework();//初始化
glClear(GL_COLOR_BUFFER_BIT);
glBegin(GL_LINES);
glColor3f(1.0, 1.0, 1.0);
int len1 = poly1.size();//绘制多边形
for (int i = 0; i < len1; i++)
glVertex2f(poly1[i].x, poly1[i].y);
glVertex2f(poly1[(i+1)%len1].x, poly1[(i+1)%len1].y);
p1.push_back(poly1[i].x, poly1[i].y, poly1[(i+1)%len1].x, poly1[(i+1)%len1].y);
int len2 = poly2.size();
for (int i = 0; i < len2; i++)
glVertex2f(poly2[i].x, poly2[i].y);
glVertex2f(poly2[(i+1)%len2].x, poly2[(i+1)%len2].y);
p2.push_back(poly2[i].x, poly2[i].y, poly2[(i+1)%len2].x, poly2[(i+1)%len2].y);
getIntersections();
glEnd();
glFlush();
最核心的代码,遍历两个多边形
void work()
vector<Point2d> now;//当前选择到的点
int len1 = new1.size();
int len2 = new2.size();
for (int i = 0; i < new1.size(); i++) //new1 第一个新多边形 new2第一个新多边形
if (vis1[i]) continue;
int ch = 1, nowpos = i;
while (1)
if (ch == 1) //遍历第一个多边形
if (isPointInsidePoly以上是关于Weiler-Atherton算法 计算机图形学多边形裁剪算法的主要内容,如果未能解决你的问题,请参考以下文章