无损卡尔曼滤波UKF与多传感器融合
Posted Young_Gy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无损卡尔曼滤波UKF与多传感器融合相关的知识,希望对你有一定的参考价值。

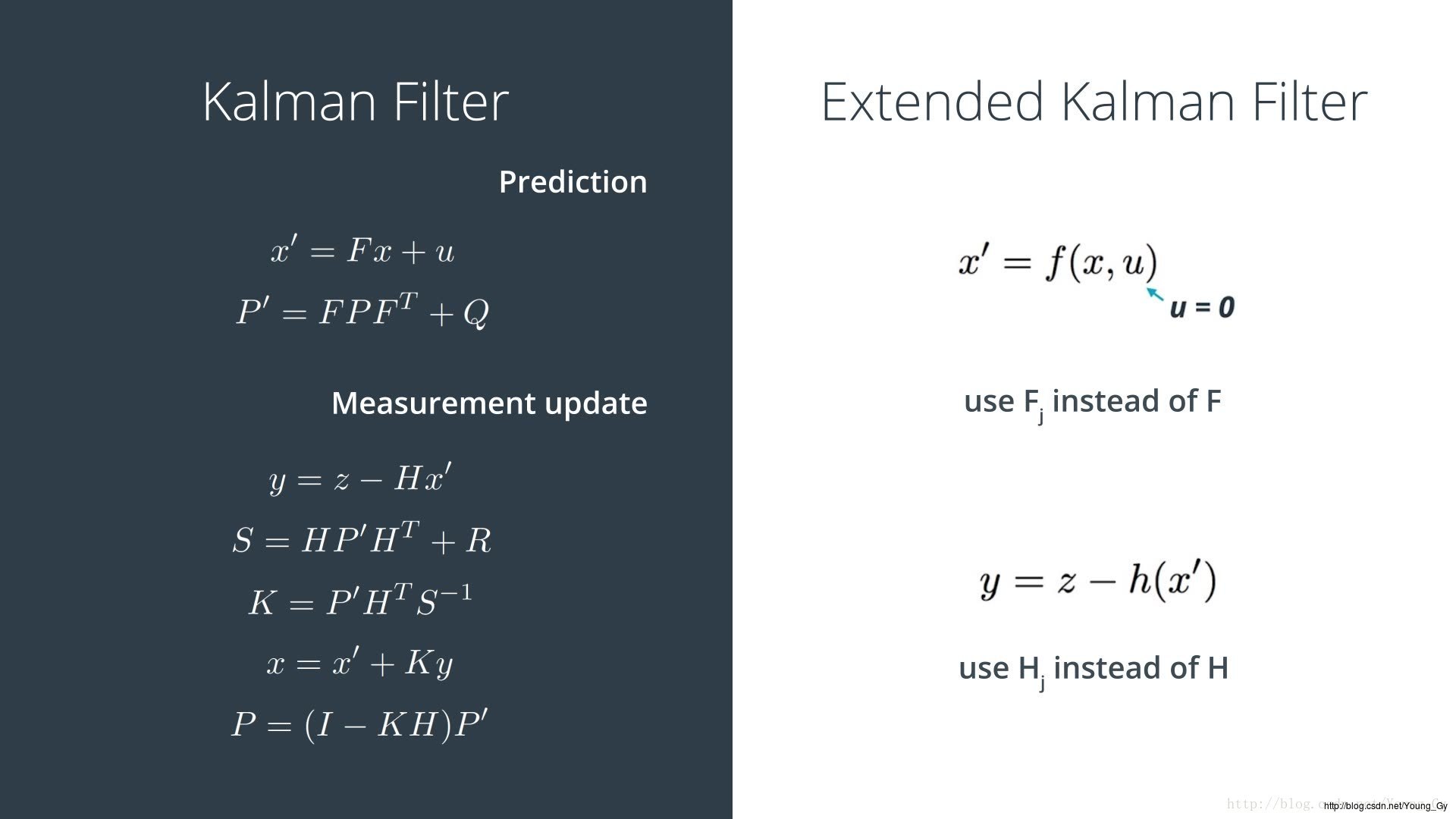
非线性系统状态估计是一大难点。KF(Kalman Filter)只适用于线性系统。EKF(Extended Kalman Filter)利用泰勒展开将非线性系统线性化。可是,EKF在强非线性系统下的误差很大。本文将介绍一种新型的滤波算法UKF(Unscented Kalman Filter),其计算精度相比EKF更高并省略了Jacobian矩阵的计算。
Why UKF
本博客在之前两篇介绍了KF和EKF。那么,为什么还需要UKF呢,原因见下表:
| 模型 | 缺点 | UKF对缺点改进 |
|---|---|---|
| KF | 只适用于线性系统 | 适用于非线性系统 |
| EKF | 线性化忽略了高阶项导致强非线性系统误差大;线性化处理需要计算Jacobian矩阵 | 对非线性的概率分布近似,没有线性化忽略高阶项; 不需要计算Jacobian矩阵 |
UKF简述
原理概述
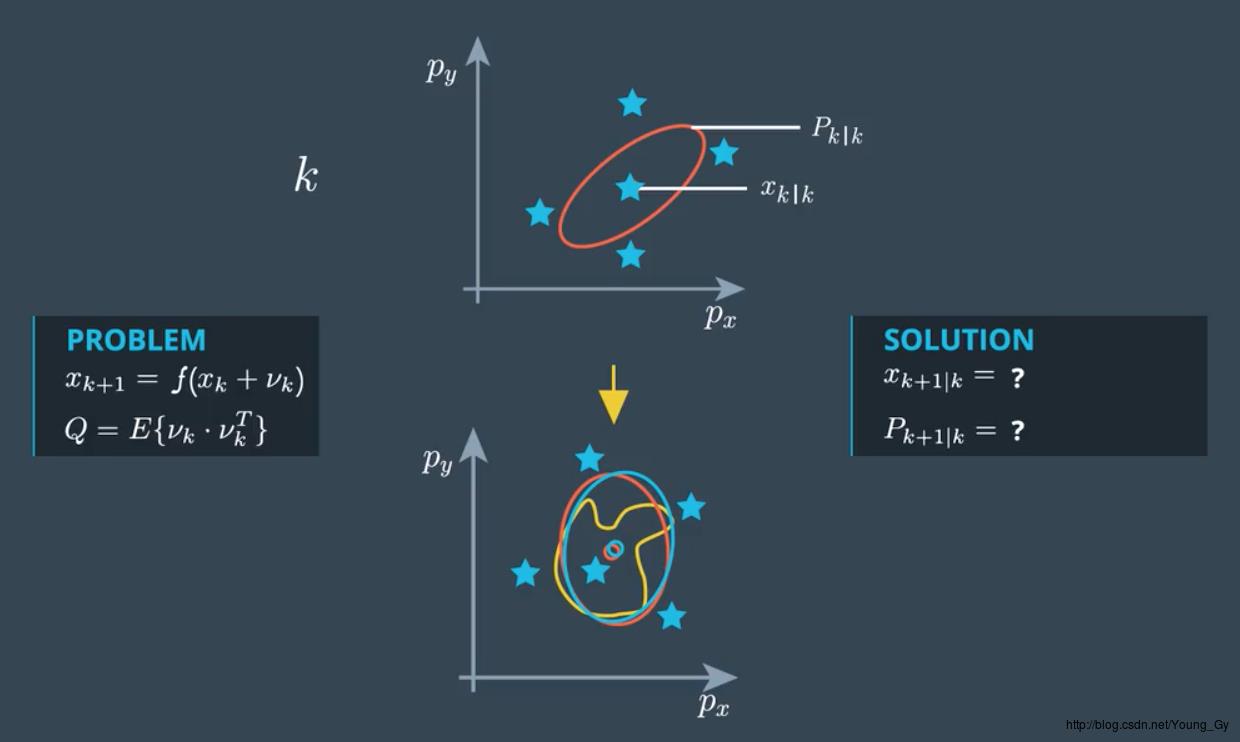
首先,回顾下UKF需要解决的问题,已知系统的状态及其方差 xk,Pk 。如果经过非线性函数 xk+1=f(xk) 后,新的状态和方差如何求解。
EKF提供的方法是将非线性函数 f(x) 作泰勒一阶展开,利用Jacobian矩阵 Hj 近似将 f(x) 线性化为 Hjx 。这种方法一方面在强非线性系统下误差大,另一方面Jacobian矩阵的计算着实令人头疼。
UKF认为每一个状态 xk,Pk 都可以用几个Sigma点(关键点) Xsig 表示。当作用于非线性函数 f(x) 时,只需要将Sigma点 Xsig 作用于非线性函数 f(x) 得到 f(Xsig) 即可。通过得到的 f(Xsig) 可以计算新的状态 xk+1,Pk+1 。
通过上面的介绍,我们知道UKF只是将非线性函数映射通过关键点映射来实现,那么出现几个问题:
- 关键点怎么找
- 找到关键点后如何求出新的状态 xk+1,Pk+1
关键点怎么找
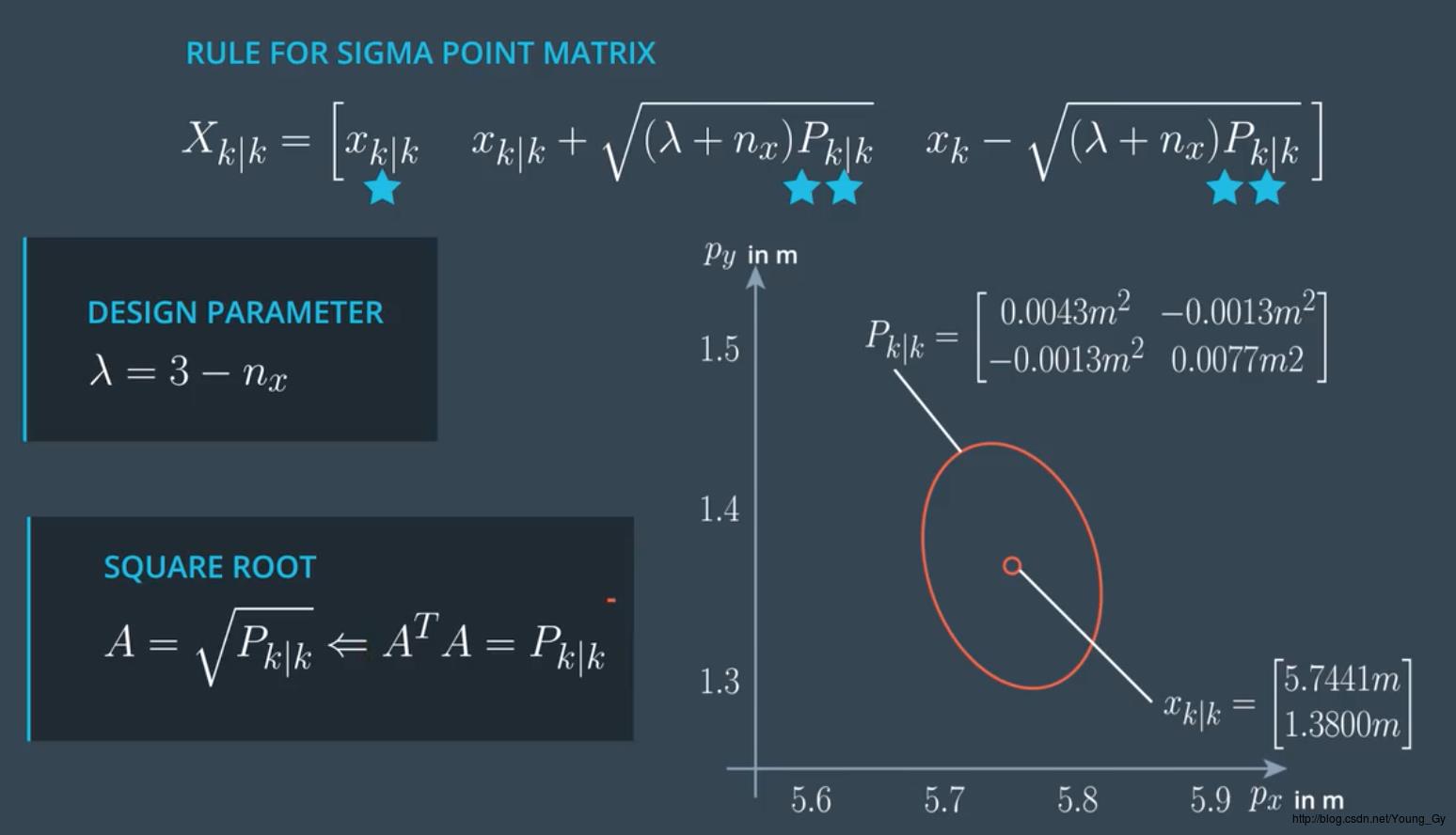
关键点的意义在于能够充分刻画原状态的分布情况,其经验公式如下图所示,需要注意的是:
- nx 代表 xk|k 的大小
- λ 代表关键点的散开情况,一般采用经验值 λ=3−nx
找到关键点后如何求出新的状态
新状态的求解公式如下图所示,需要注意的是:
- Xk+1|k 代表Sigma点集合, Xk+1|k,i 代表Sigma点集合中的第 i 个点
na 代表 xk+1|k 增广后的大小- nσ 代表Sigma点集合的大小,一般 nσ=1+2na
- 权重 wi 在 i==0 时 w0=λλ+na ,在 i!=0 时 w0=1