Ubuntu Codeblocks配置Eigen Sophus
Posted 佛法无边
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Ubuntu Codeblocks配置Eigen Sophus相关的知识,希望对你有一定的参考价值。
1.配置Eigen
从网站http://eigen.tuxfamily.org/index.php?title=Main_Page
下载Eigen的安装包,并解压。
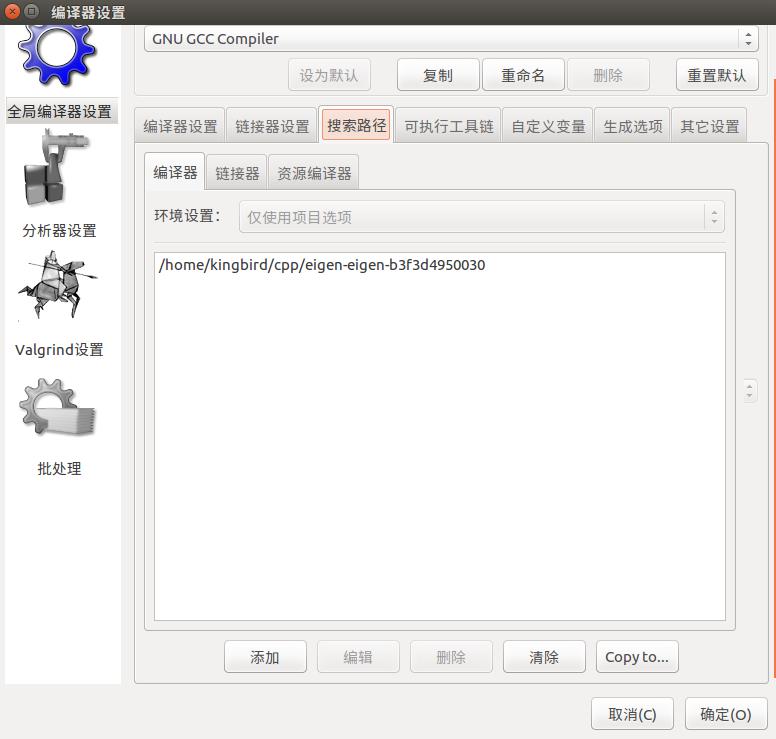
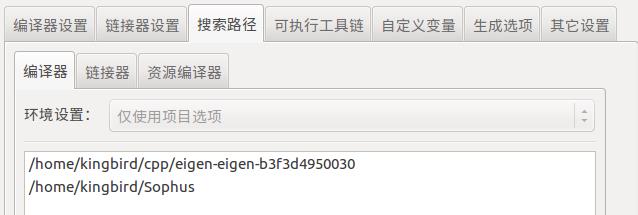
在codeblocks中的设置-编译器-全局编译器设置-搜索路径-编译器,添加解压后的Eigen安装包即可。
编写简单的程序测试
1 #include <iostream> 2 #include <Eigen/Dense> 3 #include <Eigen/Core> 4 using namespace std; 5 6 int main() 7 { 8 Eigen::Matrix3d m; 9 m << 1,2,3,4,5,6,7,8,9; 10 cout << m << endl; 11 return 0; 12 }
编译运行查看结果。
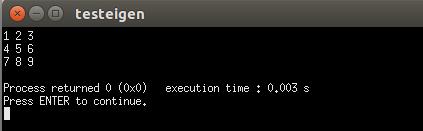
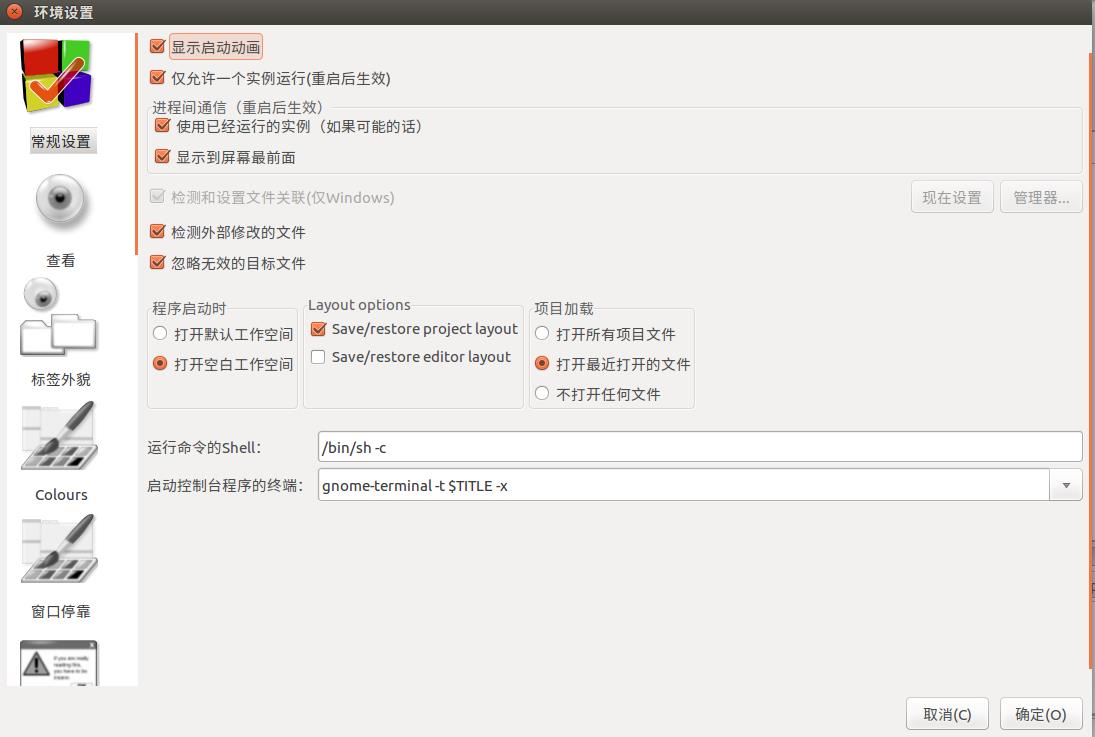
看起来字体比较小,这环境设置中切换为终端输出。
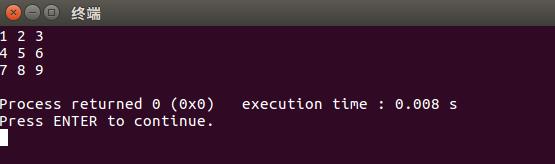
终端中的输出为:
2.配置Sophus
在终端中输入
git clone http://github.com/strasdat/Sophus.git
cd Sophus/
git checkout a621ff
mkdir build
cd build
cmake ..
make
编译完成后
- 1 将Sophus添加到搜索路径
- 2 将build文件夹中的 libSophus.so添加到链接器设置中的链接库
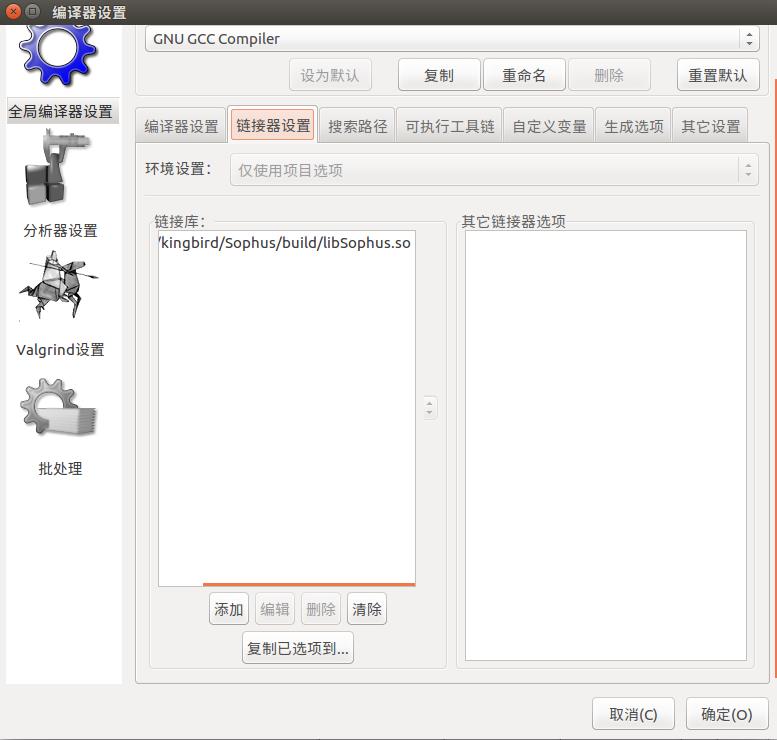
- 3 将build文件夹中的 libSophus.so复制到/usr/lib/x86_64-linux-gnu目录下,在/usr/lib/x86_64-linux-gnu文件夹打开终端输入
$ sudo cp /home/kingbird/Sophus/build/libSophus.so libSophus.so
写测试程序
#include <iostream> #include <Eigen/Dense> #include <Eigen/Core> #include <Eigen/Geometry> #include "sophus/so3.h" #include "sophus/se3.h" using namespace std; int main() { Eigen::Matrix3d m; m << 1,2,3,4,5,6,7,8,9; cout << m << endl; Eigen::AngleAxisd A1(M_PI / 2, Eigen::Vector3d(0, 0, 1)); Eigen::Matrix3d R1 = A1.matrix(); Eigen::Quaterniond Q1(A1); Sophus::SO3 SO3_R(R1); cout << "SO(3) SO3_R from Matrix" << SO3_R << endl << endl; return 0; }
输出结果
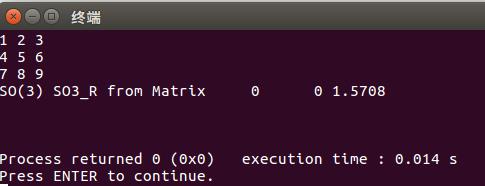
配置完成。
以上是关于Ubuntu Codeblocks配置Eigen Sophus的主要内容,如果未能解决你的问题,请参考以下文章