Tomcat如何实现NIO
Posted Moonshoterr
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Tomcat如何实现NIO相关的知识,希望对你有一定的参考价值。
UNIX 系统下的 I/O 模型有 5 种:同步阻塞 I/O、同步非阻塞 I/O、I/O 多路复用、信号驱 动 I/O 和异步 I/O。CPU 访问内存的速 度远远高于外部设备,因此 CPU 是先把外部设备的数据读到内存里,然后再进行处理。所以当你的程序通过 CPU 向外部设备发出一个读指令时,数据从外部设备 拷贝到内存往往需要一段时间,这个时候 CPU 没事干了,程序是主动把 CPU 让给别 人?还是让 CPU 不停地查:数据到了吗,数据到了吗……
这就是 I/O 模型要解决的问题。对于一个网络 I/O 通信过程,比如网络数据读取,会涉及两个对象,一个是调用这个 I/O 操作的用户线程,另外一个就是操作系统内核。一个进程的地址空间分为用户空间和内核空 间,用户线程不能直接访问内核空间。
用户发起I/0操作后,网络数据读取操作会经历两个步骤:
用户线程等待内核将数据从网卡拷贝到内核空间。
内核将数据从内核空间拷贝到用户空间。
各种 I/O 模型的区别就是:它们实现这两个步骤的方式是不一样的。
同步阻塞 I/O:用户线程发起 read 调用后就阻塞了,让出 CPU。内核等待网卡数据到来, 把数据从网卡拷贝到内核空间,接着把数据拷贝到用户空间,再把用户线程叫醒。
同步非阻塞 I/O:用户线程不断的发起 read 调用,数据没到内核空间时,每次都返回失 败,直到数据到了内核空间,这一次 read 调用后,在等待数据从内核空间拷贝到用户空间 这段时间里,线程还是阻塞的,等数据到了用户空间再把线程叫醒。
I/O 多路复用:用户线程的读取操作分成两步了,线程先发起 select 调用,目的是问内核 数据准备好了吗?等内核把数据准备好了,用户线程再发起 read 调用。在等待数据从内核 空间拷贝到用户空间这段时间里,线程还是阻塞的。那为什么叫 I/O 多路复用呢?因为一 次 select 调用可以向内核查多个数据通道(Channel)的状态,所以叫多路复用。
异步 I/O:用户线程发起 read 调用的同时注册一个回调函数,read 立即返回,等内核将 数据准备好后,再调用指定的回调函数完成处理。在这个过程中,用户线程一直没有阻塞。
Tomcat 的 NioEndPoint 组件实现了 I/O 多路复用模型。
对于 Java 的多路复用器的使用,无非是两步:
1. 创建一个 Seletor,在它身上注册各种感兴趣的事件,然后调用 select 方法,等待感兴 趣的事情发生。
2. 感兴趣的事情发生了,比如可以读了,这时便创建一个新的线程从 Channel 中读数据。
Tomcat 的 NioEndpoint 组件一共包含 LimitLatch、Acceptor、Poller、SocketProcessor 和 Executor 共 5 个组件。
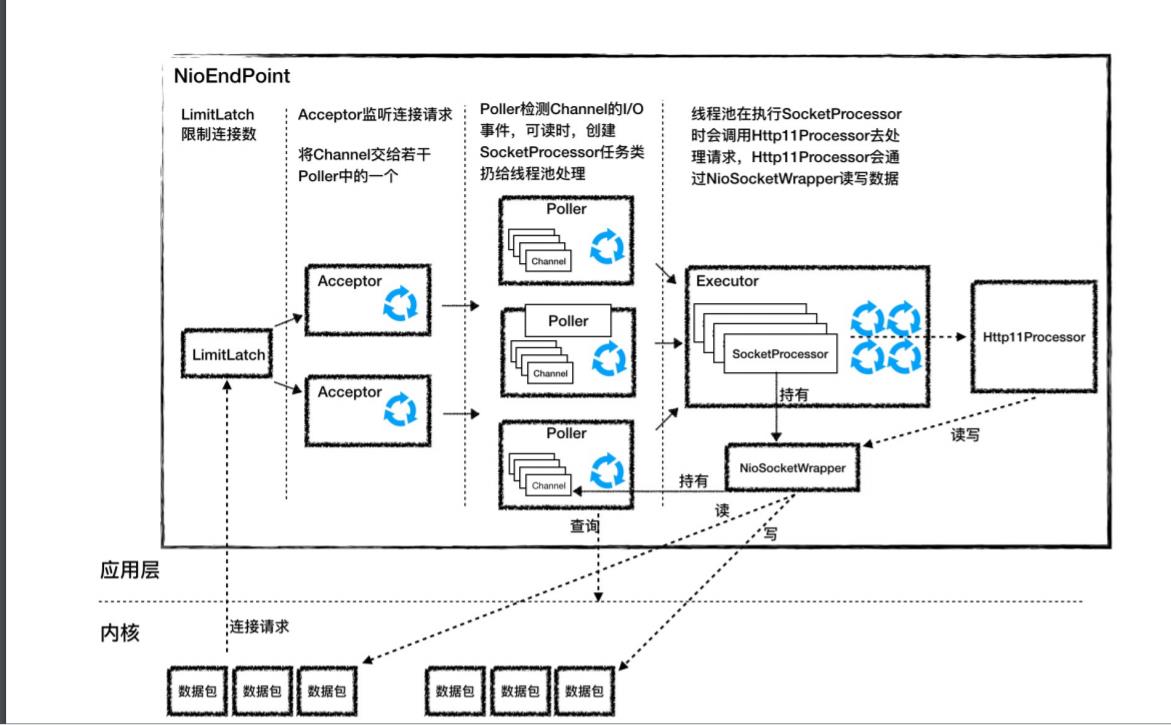
LimitLatch 是连接控制器,它负责控制最大连接数,NIO 模式下默认是 10000,达到这个 阈值后,连接请求被拒绝。
Acceptor 跑在一个单独的线程里,它在一个死循环里调用 accept 方法来接收新连接,一 旦有新的连接请求到来,accept 方法返回一个 Channel 对象,接着把 Channel 对象交给 Poller 去处理。
Poller 的本质是一个 Selector,也跑在单独线程里。Poller 在内部维护一个 Channel 数 组,它在一个死循环里不断检测 Channel 的数据就绪状态,一旦有 Channel 可读,就生成 一个 SocketProcessor 任务对象扔给 Executor 去处理。
Executor 就是线程池,负责运行 SocketProcessor 任务类,SocketProcessor 的 run 方 法会调用 Http11Processor 来读取和解析请求数据。我们知道,Http11Processor 是应用 层协议的封装,它会调用容器获得响应,再把响应通过 Channel 写出。
LimitLatch 的核心代码如下:
public class LimitLatch {
private class Sync extends AbstractQueuedSynchronizer {
@Override
protected int tryAcquireShared() {
long newCount = count.incrementAndGet();
if (newCount > limit) {
count.decrementAndGet();
return -1;
} else {
return 1;
}
}
@Override
protected boolean tryReleaseShared(int arg) {
count.decrementAndGet();
return true;
}
}
private final Sync sync;
private final AtomicLong count;
private volatile long limit;
// 线程调用这个方法来获得接收新连接的许可,线程可能被阻塞
public void countUpOrAwait() throws InterruptedException {
sync.acquireSharedInterruptibly(1);
}
// 调用这个方法来释放一个连接许可,那么前面阻塞的线程可能被唤醒
public long countDown() {
sync.releaseShared(0);
long result = getCount();
return result;
}
}
LimitLatch 内步定义了内部类 Sync,而 Sync 扩展了 AQS, AQS 是 Java 并发包中的一个核心类,它在内部维护一个状态和一个线程队列,可以用来 控制线程什么时候挂起,什么时候唤醒。我们可以扩展它来实现自己的同步器,实际上 Java 并发包里的锁和条件变量等等都是通过 AQS 来实现的,而这里的 LimitLatch 也不例 外。
1. 用户线程通过调用 LimitLatch 的 countUpOrAwait 方法来拿到锁,如果暂时无法获 取,这个线程会被阻塞到 AQS 的队列中。那 AQS 怎么知道是阻塞还是不阻塞用户线程 呢?其实这是由 AQS 的使用者来决定的,也就是内部类 Sync 来决定的,因为 Sync 类重 写了 AQS 的tryAcquireShared() 方法。它的实现逻辑是如果当前连接数 count 小于 limit,线程能获取锁,返回 1,否则返回 -1
2. 如何用户线程被阻塞到了 AQS 的队列,那什么时候唤醒呢?同样是由 Sync 内部类决 定,Sync 重写了 AQS 的releaseShared() 方法,其实就是当一个连接请求处理完了,这 时又可以接收一个新连接了,这样前面阻塞的线程将会被唤醒。
AQS 就是一个骨架抽象类,它帮我们搭了个架子,用来控制线程的阻塞和唤 醒。具体什么时候阻塞、什么时候唤醒由你来决定。当前线程数被定义成原 子变量 AtomicLong,而 limit 变量用 volatile 关键字来修饰,这些并发编程的实际运用。
Acceptor 实现了 Runnable 接口,因此可以跑在单独线程里。一个端口号只能对应一个 ServerSocketChannel,因此这个 ServerSocketChannel 是在多个 Acceptor 线程之间共 享的,它是 Endpoint 的属性,由 Endpoint 完成初始化和端口绑定。初始化过程如下:
serverSock = ServerSocketChannel.open(); serverSock.socket().bind(addr,getAcceptCount()); serverSock.configureBlocking(true);
从上面的初始化代码我们可以看到两个关键信息: 1.bind 方法的第二个参数表示操作系统的等待队列长度,当应用层面的连 接数到达最大值时,操作系统可以继续接收连接,那么操作系统能继续接收的最大连接数就 是这个队列长度,可以通过 acceptCount 参数配置,默认是 100。
2.ServerSocketChannel 被设置成阻塞模式,也就是说它是以阻塞的方式接收连接的。 ServerSocketChannel 通过 accept() 接受新的连接,accept() 方法返回获得 SocketChannel 对象,然后将 SocketChannel 对象封装在一个 PollerEvent 对象中,并 将 PollerEvent 对象压入 Poller 的 Queue 里,这是个典型的生产者 - 消费者模式, Acceptor 与 Poller 线程之间通过 Queue 通信。
Poller 本质是一个 Selector,它内部维护一个 Queue,这个 Queue 定义如下:
private final SynchronizedQueue<PollerEvent> events = new SynchronizedQueue<>();
SynchronizedQueue 的方法比如 offer、poll、size 和 clear 方法,都使用了 Synchronized 关键字进行修饰,用来保证同一时刻只有一个 Acceptor 线程对 Queue 进 行读写。同时有多个 Poller 线程在运行,每个 Poller 线程都有自己的 Queue。每个 Poller 线程可能同时被多个 Acceptor 线程调用来注册 PollerEvent。同样 Poller 的个数可 以通过 pollers 参数配置.
Poller 不断的通过内部的 Selector 对象向内核查询 Channel 的状态,一旦可读就生成任务 类 SocketProcessor 交给 Executor 去处理。Poller 的另一个重要任务是循环遍历检查自 己所管理的 SocketChannel 是否已经超时,如果有超时就关闭这个 SocketChannel。
Poller 会创建 SocketProcessor 任务类交给线程池处理,而 SocketProcessor 实现了 Runnable 接口,用来定义 Executor 中线程所执行的任务,主要就是调用 Http11Processor 组件来处理请求。Http11Processor 读取 Channel 的数据来生成 ServletRequest 对象.
Http11Processor 并不是直接读取 Channel 的。这是因为 Tomcat 支持同步非阻塞 I/O 模型和异步 I/O 模型,在 Java API 中,相应的 Channel 类也是不一样的,比如有 AsynchronousSocketChannel 和 SocketChannel,为了对 Http11Processor 屏蔽这些 差异,Tomcat 设计了一个包装类叫作 SocketWrapper,Http11Processor 只调用 SocketWrapper 的方法去读写数据。
Executor 是 Tomcat 定制版的线程池,它负责创建真正干活的工作线程,干什么活呢?就 是执行 SocketProcessor 的 run 方法,也就是解析请求并通过容器来处理请求,最终会调 用到我们的 Servlet。
NioEndpoint 要完成三件事情:接收连接、检测 I/O 事件以及处理请 求,那么最核心的就是把这三件事情分开,用不同规模的线程去处理,比如用专门的线程组 去跑 Acceptor,并且 Acceptor 的个数可以配置;用专门的线程组去跑 Poller,Poller 的 个数也可以配置;最后具体任务的执行也由专门的线程池来处理,也可以配置线程池的大 小。
以上是关于Tomcat如何实现NIO的主要内容,如果未能解决你的问题,请参考以下文章
Nio2Endpoint组件:Tomcat如何实现异步I/O?