kinect 2(ubuntu16.04)
Posted 嘟嘟嘟啦
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了kinect 2(ubuntu16.04)相关的知识,希望对你有一定的参考价值。
安装libfreenect2
参考
https://github.com/OpenKinect/libfreenect2/blob/master/README.md#linux
如果安装后找不到有关库或头文件则参考
https://blog.csdn.net/yeluohanchan/article/details/75578113
安装后仅通过libfreenect2显示rgb图和深度图可参考
https://blog.csdn.net/lvxobrkszd/article/details/75142503
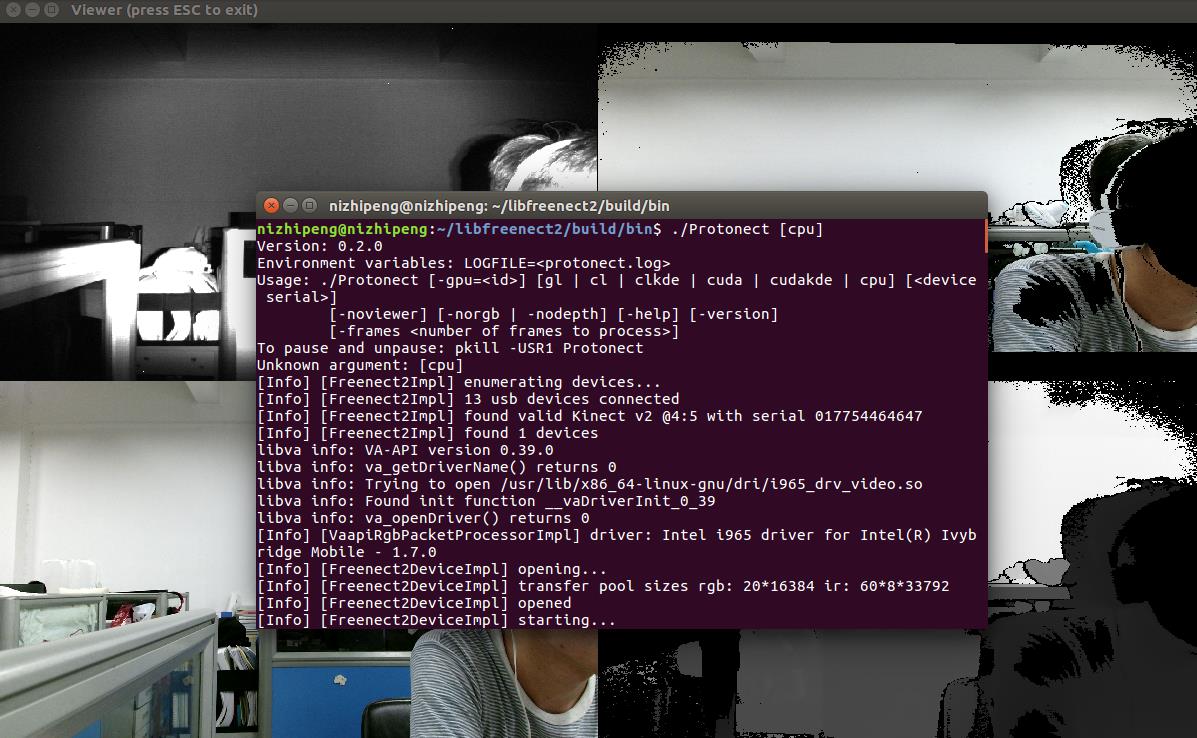
与以上链接不同其中终端输入为./bin/Protonect [cpu]而不是./bin/Protonect cpu,后者显示的速度较慢,原因不知。
1 cd .. 2 mkdir build && cd build 3 cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2 4 make 5 sudo make install 6 7 测试: 8 ./bin/Protonect [cpu] 9 ./bin/Protonect [gl] 10 ./bin/Protonect [cl]
iai_kinect2(ROS)
1 cd ~/catkin_ws/src/ 2 git clone https://github.com/code-iai/iai_kinect2.git 3 cd iai_kinect2 4 rosdep install -r --from-paths . 5 cd ~/catkin_ws 6 catkin_make -DCMAKE_BUILD_TYPE="Release"
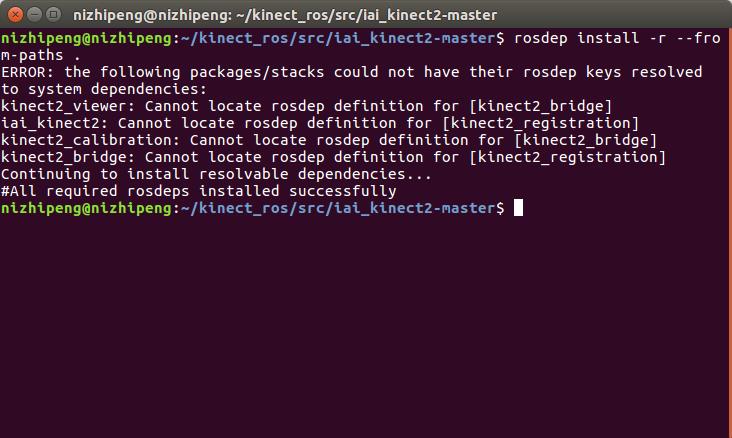
其中第4行,若显示错误改为 rosdep install --from-paths /home/nizhipeng/kinect_ros/src/iai_kinect2-master --ignore-src -r
结果显示为
#All required rosdeps installed successfully
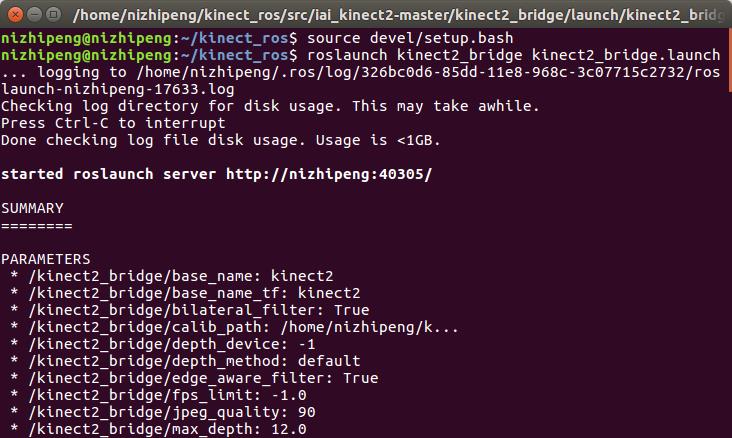
其次路径不能含中文,否则出现下列错误
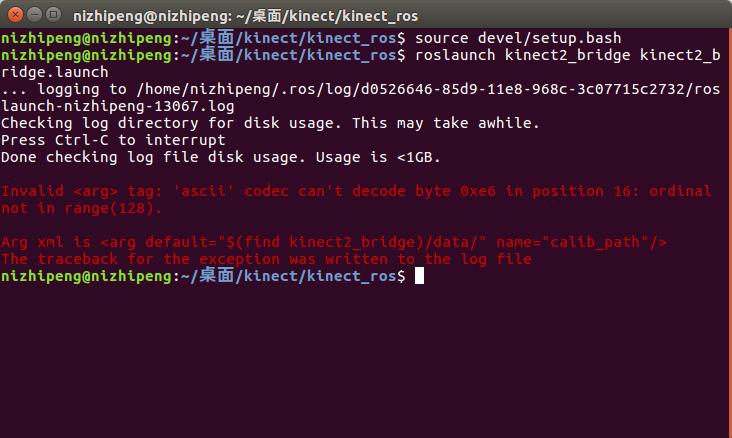
设置环境变量,打开kinect接口:
新建一个终端,显示运行图像
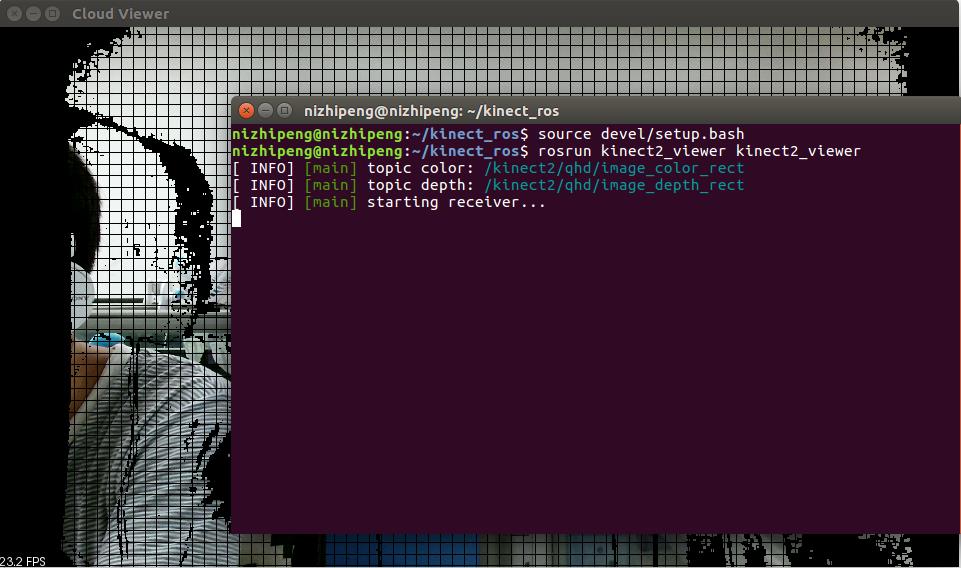
实时显示点云
也可在~/kinect_ros/src/iai_kinect2-master/kinect2_viewer/src$ 下修改viewer.cpp程序,通过opencv单独显示rgb图和深度图。

修改的程序部分:
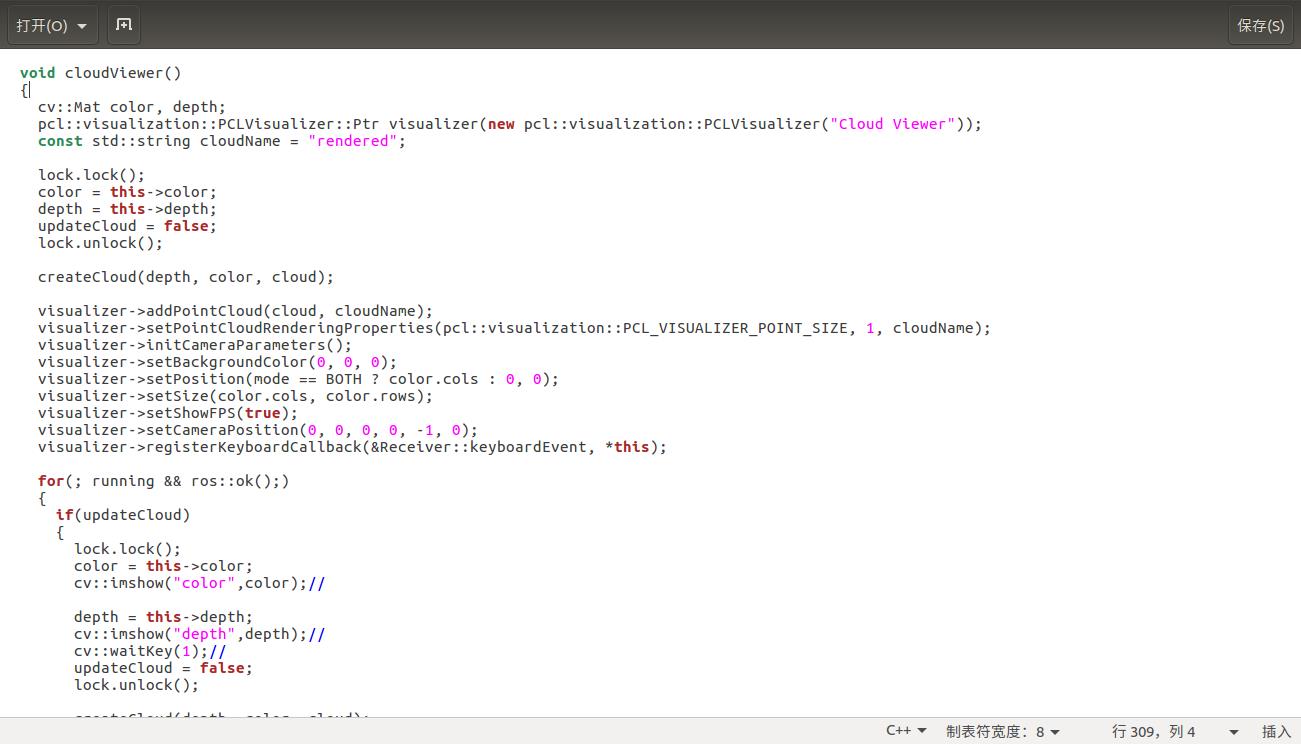
双斜杠处(//)
也可参考:https://www.cnblogs.com/li-yao7758258/p/7445429.html
欢迎交流。
以上是关于kinect 2(ubuntu16.04)的主要内容,如果未能解决你的问题,请参考以下文章