Linux操作系统 进程之间的通信
Posted 石斛
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux操作系统 进程之间的通信相关的知识,希望对你有一定的参考价值。
进程之间的通信
预备知识:
1、用户态和内核态,当一个进程在执行用户自己的代码时处于用户运行态(用户态);当一个进程因为系统调用陷入内核代码中执行时处于内核运行态(内核态)。
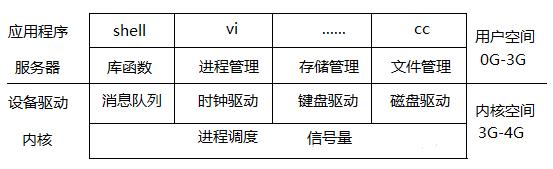
2、进程之间的通信(Inter Processs Communication-IPC)实现机制有:管道、消息队列、信号值、信号、共享内存、共享映射文件、套接字等。
3、及时通信:信号(类似中断);非及时通信:共享内存、邮箱、管道、套接字、
4、常见的信号:终止信号、定时器信号、用户自定义信号等
5、信号:用户、系统或者进程发送给目标进程的信息,以通知目标进程某个状态的改变或系统异常。
6、PCB(progress control block-进程控制块),系统通过PCB,描述进程和控制进程。在Linux系统下,PCB是 task_struct结构体(进程描述符)。
1、进程状态:记录进程是处于运行状态还是等待状态
2、调度信息:进程由哪个函数调度,具体怎样调度等
3、进程之间的通讯状况
4、进程之间的亲属关系:在父进程和子进程之间有task_struct类型的指针,将父进程和子进程联系起来
5、时间数据信息:每个进程执行所占用CPU的时间
6、进程的标志
7、进程的标识符:该进程唯一的标识符用来区别其他进程
8、信号处理信息
9、文件信息:可以进行读写操作的一些文件的信息
10、页面管理信息
11、优先级:相对于其他进程的优先级
12、ptrace系统调用
13、虚拟内存处理
struct task_struct { volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */ void *stack; atomic_t usage; unsigned int flags; /* per process flags, defined below */ unsigned int ptrace; int lock_depth; /* BKL lock depth */ #ifdef CONFIG_SMP #ifdef __ARCH_WANT_UNLOCKED_CTXSW int oncpu; #endif #endif int prio, static_prio, normal_prio; unsigned int rt_priority; const struct sched_class *sched_class; struct sched_entity se; struct sched_rt_entity rt; #ifdef CONFIG_PREEMPT_NOTIFIERS /* list of struct preempt_notifier: */ struct hlist_head preempt_notifiers; #endif /* * fpu_counter contains the number of consecutive context switches * that the FPU is used. If this is over a threshold, the lazy fpu * saving becomes unlazy to save the trap. This is an unsigned char * so that after 256 times the counter wraps and the behavior turns * lazy again; this to deal with bursty apps that only use FPU for * a short time */ unsigned char fpu_counter; #ifdef CONFIG_BLK_DEV_IO_TRACE unsigned int btrace_seq; #endif unsigned int policy; cpumask_t cpus_allowed; #ifdef CONFIG_TREE_PREEMPT_RCU int rcu_read_lock_nesting; char rcu_read_unlock_special; struct rcu_node *rcu_blocked_node; struct list_head rcu_node_entry; #endif /* #ifdef CONFIG_TREE_PREEMPT_RCU */ #if defined(CONFIG_SCHEDSTATS) || defined(CONFIG_TASK_DELAY_ACCT) struct sched_info sched_info; #endif struct list_head tasks; struct plist_node pushable_tasks; struct mm_struct *mm, *active_mm; /* task state */ int exit_state; int exit_code, exit_signal; int pdeath_signal; /* The signal sent when the parent dies */ unsigned int personality; unsigned did_exec:1; unsigned in_execve:1; /* Tell the LSMs that the process is doing an * execve */ unsigned in_iowait:1; /* Revert to default priority/policy when forking */ unsigned sched_reset_on_fork:1; pid_t pid; pid_t tgid; #ifdef CONFIG_CC_STACKPROTECTOR /* Canary value for the -fstack-protector gcc feature */ unsigned long stack_canary; #endif /* * pointers to (original) parent process, youngest child, younger sibling, * older sibling, respectively. (p->father can be replaced with * p->real_parent->pid) */ struct task_struct *real_parent; /* real parent process */ struct task_struct *parent; /* recipient of SIGCHLD, wait4() reports */ /* * children/sibling forms the list of my natural children */ struct list_head children; /* list of my children */ struct list_head sibling; /* linkage in my parent\'s children list */ struct task_struct *group_leader; /* threadgroup leader */ /* * ptraced is the list of tasks this task is using ptrace on. * This includes both natural children and PTRACE_ATTACH targets. * p->ptrace_entry is p\'s link on the p->parent->ptraced list. */ struct list_head ptraced; struct list_head ptrace_entry; /* * This is the tracer handle for the ptrace BTS extension. * This field actually belongs to the ptracer task. */ struct bts_context *bts; /* PID/PID hash table linkage. */ struct pid_link pids[PIDTYPE_MAX]; struct list_head thread_group; struct completion *vfork_done; /* for vfork() */ int __user *set_child_tid; /* CLONE_CHILD_SETTID */ int __user *clear_child_tid; /* CLONE_CHILD_CLEARTID */ cputime_t utime, stime, utimescaled, stimescaled; cputime_t gtime; cputime_t prev_utime, prev_stime; unsigned long nvcsw, nivcsw; /* context switch counts */ struct timespec start_time; /* monotonic time */ struct timespec real_start_time; /* boot based time */ /* mm fault and swap info: this can arguably be seen as either mm-specific or thread-specific */ unsigned long min_flt, maj_flt; struct task_cputime cputime_expires; struct list_head cpu_timers[3]; /* process credentials */ const struct cred *real_cred; /* objective and real subjective task * credentials (COW) */ const struct cred *cred; /* effective (overridable) subjective task * credentials (COW) */ struct mutex cred_guard_mutex; /* guard against foreign influences on * credential calculations * (notably. ptrace) */ struct cred *replacement_session_keyring; /* for KEYCTL_SESSION_TO_PARENT */ char comm[TASK_COMM_LEN]; /* executable name excluding path - access with [gs]et_task_comm (which lock it with task_lock()) - initialized normally by flush_old_exec */ /* file system info */ int link_count, total_link_count; #ifdef CONFIG_SYSVIPC /* ipc stuff */ struct sysv_sem sysvsem; #endif #ifdef CONFIG_DETECT_HUNG_TASK /* hung task detection */ unsigned long last_switch_count; #endif /* CPU-specific state of this task */ struct thread_struct thread; /* filesystem information */ struct fs_struct *fs; /* open file information */ struct files_struct *files; /* namespaces */ struct nsproxy *nsproxy; /* signal handlers */ struct signal_struct *signal; struct sighand_struct *sighand; sigset_t blocked, real_blocked; sigset_t saved_sigmask; /* restored if set_restore_sigmask() was used */ struct sigpending pending; unsigned long sas_ss_sp; size_t sas_ss_size; int (*notifier)(void *priv); void *notifier_data; sigset_t *notifier_mask; struct audit_context *audit_context; #ifdef CONFIG_AUDITSYSCALL uid_t loginuid; unsigned int sessionid; #endif seccomp_t seccomp; /* Thread group tracking */ u32 parent_exec_id; u32 self_exec_id; /* Protection of (de-)allocation: mm, files, fs, tty, keyrings, mems_allowed, * mempolicy */ spinlock_t alloc_lock; #ifdef CONFIG_GENERIC_HARDIRQS /* IRQ handler threads */ struct irqaction *irqaction; #endif /* Protection of the PI data structures: */ spinlock_t pi_lock; #ifdef CONFIG_RT_MUTEXES /* PI waiters blocked on a rt_mutex held by this task */ struct plist_head pi_waiters; /* Deadlock detection and priority inheritance handling */ struct rt_mutex_waiter *pi_blocked_on; #endif #ifdef CONFIG_DEBUG_MUTEXES /* mutex deadlock detection */ struct mutex_waiter *blocked_on; #endif #ifdef CONFIG_TRACE_IRQFLAGS unsigned int irq_events; int hardirqs_enabled; unsigned long hardirq_enable_ip; unsigned int hardirq_enable_event; unsigned long hardirq_disable_ip; unsigned int hardirq_disable_event; int softirqs_enabled; unsigned long softirq_disable_ip; unsigned int softirq_disable_event; unsigned long softirq_enable_ip; unsigned int softirq_enable_event; int hardirq_context; int softirq_context; #endif #ifdef CONFIG_LOCKDEP # define MAX_LOCK_DEPTH 48UL u64 curr_chain_key; int lockdep_depth; unsigned int lockdep_recursion; struct held_lock held_locks[MAX_LOCK_DEPTH]; gfp_t lockdep_reclaim_gfp; #endif /* journalling filesystem info */ void *journal_info; /* stacked block device info */ struct bio *bio_list, **bio_tail; /* VM state */ struct reclaim_state *reclaim_state; struct backing_dev_info *backing_dev_info; struct io_context *io_context; unsigned long ptrace_message; siginfo_t *last_siginfo; /* For ptrace use. */ struct task_io_accounting ioac; #if defined(CONFIG_TASK_XACCT) u64 acct_rss_mem1; /* accumulated rss usage */ u64 acct_vm_mem1; /* accumulated virtual memory usage */ cputime_t acct_timexpd; /* stime + utime since last update */ #endif #ifdef CONFIG_CPUSETS nodemask_t mems_allowed; /* Protected by alloc_lock */ int cpuset_mem_spread_rotor; #endif #ifdef CONFIG_CGROUPS /* Control Group info protected by css_set_lock */ struct css_set *cgroups; /* cg_list protected by css_set_lock and tsk->alloc_lock */ struct list_head cg_list; #endif #ifdef CONFIG_FUTEX struct robust_list_head __user *robust_list; #ifdef CONFIG_COMPAT struct compat_robust_list_head __user *compat_robust_list; #endif struct list_head pi_state_list; struct futex_pi_state *pi_state_cache; #endif #ifdef CONFIG_PERF_EVENTS struct perf_event_context *perf_event_ctxp; struct mutex perf_event_mutex; struct list_head perf_event_list; #endif #ifdef CONFIG_NUMA struct mempolicy *mempolicy; /* Protected by alloc_lock */ short il_next; #endif atomic_t fs_excl; /* holding fs exclusive resources */ struct rcu_head rcu; /* * cache last used pipe for splice */ struct pipe_inode_info *splice_pipe; #ifdef CONFIG_TASK_DELAY_ACCT struct task_delay_info *delays; #endif #ifdef CONFIG_FAULT_INJECTION int make_it_fail; #endif struct prop_local_single dirties; #ifdef CONFIG_LATENCYTOP int latency_record_count; struct latency_record latency_record[LT_SAVECOUNT]; #endif /* * time slack values; these are used to round up poll() and * select() etc timeout values. These are in nanoseconds. */ unsigned long timer_slack_ns; unsigned long default_timer_slack_ns; struct list_head *scm_work_list; #ifdef CONFIG_FUNCTION_GRAPH_TRACER /* Index of current stored adress in ret_stack */ int curr_ret_stack; /* Stack of return addresses for return function tracing */ struct ftrace_ret_stack *ret_stack; /* time stamp for last schedule */ unsigned long long ftrace_timestamp; /* * Number of functions that haven\'t been traced * because of depth overrun. */ atomic_t trace_overrun; /* Pause for the tracing */ atomic_t tracing_graph_pause; #endif #ifdef CONFIG_TRACING /* state flags for use by tracers */ unsigned long trace; /* bitmask of trace recursion */ unsigned long trace_recursion; #endif /* CONFIG_TRACING */ unsigned long stack_start; };
进程通信机制的原理:
1、信号操作相关的数据结构:
一、sigaction
struct sigction{
void(*sa_handler)(int); # sa_handler是信号的处理函数对应的指针
sigset_t sa_mask; # sa_mask是信号掩码,表示该处理哪些信号,哪些信号暂时不用处理
int sa_flags;
void(*sa_restorer)(void);
};
二、时间相关的数据结构:timeval;itimeval(记录定时器的数据)
2、信号操作相关的函数
1、不同的信号(sig)有编号(signum),在头文件里面每个信号有默认的处理方式(action)。信号操作的函数主要是向进程发送信号,进程接收到信号之后,可以执行头文件中规定的宏中设定的处理的方式,也可以指定该信号执行新设定的处理的方式。
2、进程会受到多个信号,信号处理的优先顺序,暂时没处理的信号如何保存(使用哪个数据结构保存----信号集),后面如何调用信号处理函数响应进程中多个信号。每个信号集都有通过指针(*set)定位。
1、sigaction、查询或设置指定信号处理方式,return原来信号的处理方式
2、signal、设置指定信号的处理方式,通过handle(函数指针),调用函数作为信号的处理方式
3、kill、给进程(pid)发送信号(sig)
4、raise、给自身发送信号(sig)
5、sigemptyset、信号集初始化(清空信号集);sigfillset、初始化并加入所有的信号;sigaddset、将制定的信号加入信号集中;sigismenber、通过*set定位,查询signum是否在指定的信号集。
3、 定时器操作相关函数,涉及设置定时器如选择定时器类型(定时器计时消耗的时间以哪一个为准:真实时间,用户态,用户态和内核态选择不同计时器)和定时器的功能函数
1、sleep、将进程暂停运行指定时间(seconds),可以被其他优先级更高的信号或中断打断
2、alarm、在指定间隔时间之后周期性给进程发送信号SIGALRM。
3、setitimer、设置定时器
4、getitimer、获取指定类型的定时器,通过*value指针调用指定类型定时器
注:定时器定时需要重复对timeval;itimeval两个结构体进行操作。
1、UNIX时间戳(Epoch Time):Unix时间戳(英文为Unix time, POSIX time 或 Unix timestamp)是从Epoch(1970年1月1日00:00:00 UTC)开始所经过的秒数,不考虑闰秒。timeval记录就是Epoch Time至今的时间间隔,进度到毫秒。
2、itimeval结构体记录的是定时器剩余时间
以上是关于Linux操作系统 进程之间的通信的主要内容,如果未能解决你的问题,请参考以下文章