悟透Qt—求解画布经任意中心点旋转后相对旋转前坐标系的坐标
Posted itzyjr
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了悟透Qt—求解画布经任意中心点旋转后相对旋转前坐标系的坐标相关的知识,希望对你有一定的参考价值。
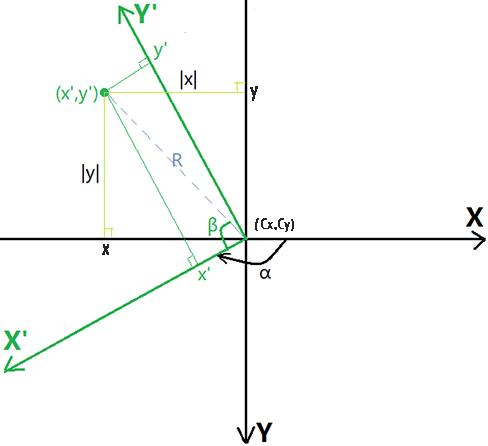
黑色坐标系是旋转前的画布坐标,画布以中心点(Cx,Cy)顺时针旋转 α 角度后,就变换成了绿色坐标系。
在经旋转后的绿色坐标坐中任取一点(x’,y’),现求出(x’,y’)在旋转前黑色坐标系中的坐标值。
|x| = R * cos(π*3/2 - α - β) = -R * cos(α + β)
|y| = R * sin(π*3/2 - α - β) = -R * sin(α + β)
x' = R * cos(β)
y' = R * sin(β)
|x| / x' = -cos(α + β) / cos(β)
|y| / y' = -sin(α + β) / sin(β)
|x| / x' = -cos(α) + sin(α) * tan(β) = -cos(α) + sin(α) * y'/x';
|y| / y' = -sin(α) * cot(β) - cos(α) = -sin(α) * x'/y' - cos(α)
|x| = -cos(α) * x' + sin(α) * y'
|y| = -sin(α) * x' - cos(α) * y'
➊旋转中心点(Cx,Cy)=(0,0)
由于|x|在黑色坐标系中心点左侧、|y|在黑色坐标系中心点上侧,所以它们都是向值减小的方向(负方向),取负值,即:
x = cos(α) * x' - sin(α) * y'
y = sin(α) * x' + cos(α) * y'
同时,也可以得出:
x' = cos(α) * x + sin(α) * y = cos(-α) * x - sin(-α) * y
y' = -sin(α) * x + cos(α) * y = sin(-α) * x + cos(-α) * y
即,顺时针(因Y轴朝下)旋转 α 角,就从(x',y')旋转到(x,y);反之,逆时针旋转 α 角(顺时针旋转 -α 角),就是从(x,y)旋转到(x',y')。
用矩阵表示为:(绕Z轴顺时针(因为Y轴向下)旋转α度的2x2旋转矩阵)
(
x
y
)
=
[
c
o
s
α
−
s
i
n
α
s
i
n
α
c
o
s
α
]
×
(
x
′
y
′
)
\\left( \\beginarray l x \\\\ y \\endarray \\right) = \\left[ \\beginarray l l cosα & -sinα \\\\ sinα & cosα \\endarray \\right] \\times \\left( \\beginarray l x' \\\\ y' \\endarray \\right)
(xy)=[cosαsinα−sinαcosα]×(x′y′)
即,画布经顺时针(因为Y轴向下)旋转 α 角度后在新的坐标系下的坐标(x’,y’),它在旋转前的坐标系下的坐标:(x,y)=[旋转矩阵]●(x’,y’)。
用Qt代码验证一下:
float angle = 90 或 180;// 这两个值最容易在脑海中去验证
float radians = qDegreesToRadians(angle);
float rotElems[] = qCos(radians), -qSin(radians),// in row-major order
qSin(radians), qCos(radians) ;
QMatrix2x2 rotMat(rotElems);
// rotMatrix(0, 0) = qCos(radians);
// rotMatrix(0, 1) = -qSin(radians);
// rotMatrix(1, 0) = qSin(radians);
// rotMatrix(1, 1) = qCos(radians);
float pointxy[] = 12.34, 67.89;
QGenericMatrix<1, 2, float> pointMat(pointxy);
auto rotPoint = rotMat * pointMat;// 矩阵乘法
qDebug() << rotPoint;
当angle=90时,公式满足(x,y)=(-y’,x’),打印结果是QGenericMatrix<1, 2, float>(-67.89 12.34),验证通过。
当angle=180时,公式满足(x,y)=(-x’,-y’),打印结果是QGenericMatrix<1, 2, float>(-12.34 -67.89),验证通过。
其中,脑海中相像一下黑色坐标系旋转90°、180°的情况,很容易知道是什么轴和什么轴方向互换或者反向了。实际上,使用其他任何角度值,也都能通过验证。
➋旋转中心点(Cx,Cy)为任意值时的旋转矩阵
前面已经推导出:
|x| = -cos(α) * x' + sin(α) * y'
|y| = -sin(α) * x' - cos(α) * y'
那么:
x = Cx - |x| = (cos(α) * x' - sin(α) * y') + Cx
y = Cy - |y| = (sin(α) * x' + cos(α) * y') + Cy
可以看到,就是经过一次平移变换,这时在矩阵上加上平移变换,就不能是2x2矩阵了,得是3x3矩阵,如下:
[
c
o
s
α
−
s
i
n
α
C
x
s
i
n
α
c
o
s
α
C
y
0
0
1
]
\\left[ \\beginarray l l l cosα & -sinα & Cx \\\\ sinα & cosα & Cy \\\\ 0 & 0 & 1 \\endarray \\right]
⎣
⎡cosαsinα0−sinαcosα0CxCy1⎦
⎤
(
x
y
1
)
=
[
c
o
s
α
−
s
i
n
α
C
x
s
i
n
α
c
o
s
α
C
y
0
0
1
]
×
(
x
′
y
′
1
)
\\left( \\beginarray l x \\\\ y \\\\ 1 \\endarray \\right) = \\left[ \\beginarray lll cosα & -sinα & Cx \\\\ sinα & cosα & Cy \\\\ 0 & 0 & 1 \\endarray \\right] \\times \\left( \\beginarray l x' \\\\ y' \\\\ 1 \\endarray \\right)
⎝
⎛xy1⎠
⎞=⎣
⎡cosαsinα0−sinαcosα0CxCy1⎦
⎤×⎝
⎛x′y′1⎠
⎞
➌旋转中心点(Cx,Cy)不是画布的中心点而是任意点时的旋转矩阵
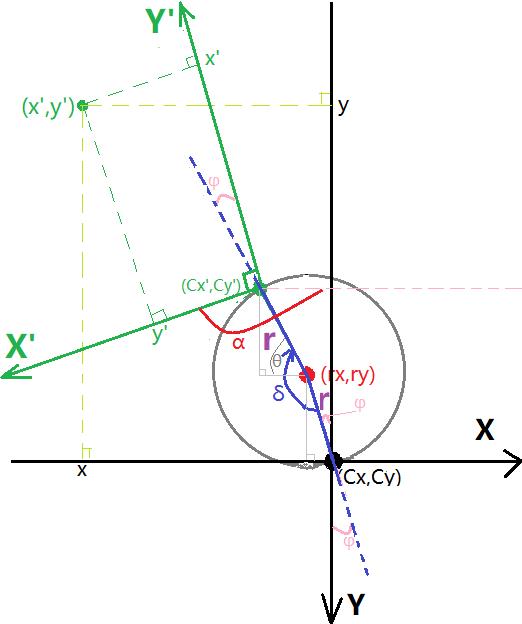
看似更复杂了,其实就是在之前的基础上作了个位移而已:
将以(Cx,Cy)为中心旋转 α 角度后的绿坐标系,平移至现在的旋转中心点(rx,ry),然后继续沿着半径平移至点(Cx’,Cy’)就形成了上图的坐标位置关系。
之前以(Cx,Cy)为中心旋转的旋转矩阵:
[
c
o
s
α
−
s
i
n
α
C
x
s
i
n
α
c
o
s
α
C
y
0
0
1
]
\\left[ \\beginarray l l l cosα & -sinα & Cx \\\\ sinα & cosα & Cy \\\\ 0 & 0 & 1 \\endarray \\right]
⎣
⎡cosαsinα0−sinαcosα0CxCy1⎦
⎤
其中,平移分量(dx0,dy0) = (Cx,Cy)
进行两次平移:
1.从(Cx,Cy)平移距离 r 至点(rx,ry);2.再次平移距离 r 到达以(rx,ry)为中心点旋转的最终位置(Cx’,Cy’)。
第1次平移:(dx1, dy1) = (rx - Cx, ry - Cy)
第2次平移:
φ = atan((Cx - rx) / (Cy - ry))
θ = δ - φ - π / 2
r = √((rx - Cx)² + (ry - Cy)²)
(dx2, dy2) = (-cosθ * r, -sinθ * r)
合总的平移,得到总偏移量:
(dx, dy) = (dx0 + dx1 + dx2, dy0 + dy1 + dy2) = f([Cx,Cy], [rx,ry], δ)
即:(dx, dy)的值只与画布坐标点(Cx,Cy)、旋转中心点(rx,ry),以及旋转角度 δ 这3个参数有关。
最后,我们需要计算出 α 角,就是X轴旋转到X'轴的偏移角度,这样才能直接套用之前计算出来的矩阵(保持参数一致性):
其实,α == φ,因为绕中心点(rx,ry)旋转的角度与X轴偏移角度是一模一样的。不过,下面可以验证一下:
α = π - (π / 2 - φ) + θ,代入 θ 角,即得 α == φ
将以上旋转矩阵的中心点(Cx,Cy)替换刚计算出来的(dx,dy),即得到绕任意中心点(rx,ry)顺时针(因Y轴向下)旋转任意角度 δ(也即α) 的旋转矩阵:
[
c
o
s
δ
−
s
i
n
δ
f
(
[
C
x
,
C
y
]
,
[
r
x
,
r
y
]
,
δ
)
x
s
i
n
δ
c
o
s
δ
f
(
[
C
x
,
C
y
]
,
[
r
x
,
r
y
]
,
δ
)
y
0
0
1
]
\\left[ \\beginarray l l l cosδ & -sinδ & f([Cx,Cy], [rx,ry], δ)_x \\\\ sinδ & cosδ & f([Cx,Cy], [rx,ry], δ)_y \\\\ 0 & 0 & 1 \\endarray \\right]
⎣
⎡cosδsinδ0−sinδcosδ0f([Cx,Cy],[rx,ry],δ)xf([Cx,Cy],[rx,ry],δ)y1⎦
⎤
最后要说的是,坐标系进行了平移,那么承载这个坐标系的画布的全部元素都进行了平移,所以前面计算逻辑是没有任何问题的,并且整个过程使用的都是随机的一种情况进行计算的,所以最终得出的旋转矩阵没有问题。
以上是关于悟透Qt—求解画布经任意中心点旋转后相对旋转前坐标系的坐标的主要内容,如果未能解决你的问题,请参考以下文章