Python矩阵相乘
Posted Dfreedom.
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Python矩阵相乘相关的知识,希望对你有一定的参考价值。
目录
1 引言
矩阵相乘分为叉乘和点乘,叉乘就是矩阵的乘法,指矩阵A的第一行乘以矩阵B的第一列,各个元素对应相乘后求和作为第一个元素的值。能够进行叉乘运算的场景:A的行数等于B的列数。
矩阵的点乘就是矩阵A和矩阵B各个对应元素的相乘。能够进行点乘运算的场景:①A和B的行向量个数相等;② A和B的列向量的个数相等;③ A和B的行向量和列向量都相等。
在matlab里面实现点乘用“.*”,实现叉乘用“*”,非常清晰明了。但是在Python里面实现矩阵相乘时经常会报错,原因是在Python里面向量和矩阵的概念和数学里面的概念有点差异。
2 Python里向量和矩阵的概念
Pyhton的向量和矩阵是严格区分开来的,这个和数学上(或者Matlab里)的概念是不一样的:
向量:一维;
矩阵:最少是二维。
举例:
import numpy as np
A=np.array([1,2,3]) #一维向量,shape=(3,)
B=np.array([[1,2,3]]) #二维数组,shape=(1,3)
print(f'A=A')
print(f'B=B')
print(f'A.shape=A.shape')
print(f'B.shape=B.shape')
print(f'A.T=A.T')
print(f'B.T=B.T')运行结果如下:
A=[1 2 3]
B=[[1 2 3]]
A.shape=(3,)
B.shape=(1, 3)
A.T=[1 2 3]
B.T=
[[1]
[2]
[3]]代码中:
① A是向量,其shape为(3,);其B是行数为1的二维数组,其shape为(1,3);
② 向量没有转置的概念。A的转置还是A,而B的转置是从行数为1的二维数组变成了列数为1的二维数组,这一点和matlab里面是不一样的。
由于以上两点原因,在计算矩阵相乘时,初学者很容易犯错。
3 矩阵相乘——Python
一般情况下,矩阵相乘会有以下三种想要的结果:
① 对位乘积:两个矩阵shape相同,各元素对应相乘,结果是一个相同shape的矩阵
② 矩阵乘法:数学上的矩阵乘法,结果是一个矩阵
③ 向量内积:对应元素相乘,再相加,结果是一个数值
对应的实现方式如下:
① 对位乘积: a*b 、multiply(a,b)
② 矩阵乘积: dot(a,b) 、matmul(a,b) 、a@b
③ 向量内积: dot(a,b)、a@b 当a,b均为一维向量
实际上对位乘积采用的是点乘,矩阵乘积或者向量内积采用的是叉乘。
4 Python矩阵相乘举例说明
从Python里面向量和矩阵的概念可知,向量和矩阵可以分为三种形式:一维向量、行数为1或者列数为1的二维矩阵、行数和行数均大于等于2的二维矩阵。对于初学者来说很容易把一维向量和行数为1或者列数为1的二维矩阵弄混,从而导致矩阵相乘出错。本文介绍了一种可以适用所有情况的矩阵相乘的表示方法,即只要能先将A和B的形式定义清楚,就能在实现点乘和叉乘时不出错。
矩阵的乘法有三种情况对位乘积、矩阵乘法、向量内积。对位乘积的结果是一个矩阵,矩阵乘法的乘积是一个矩阵,向量内积的结果是一个数,所以A和B的形式定义的思路如下:
① 对于对位乘积、矩阵乘法,其应用对象是矩阵,当A和B其中任意一个为向量时,先将向量转换成行数为1或者列数为1的二维矩阵,再参与运算;
② 对于向量内积,其应用对象是向量,当A和B其中任意一个为行数为1或者列数为1的二维矩阵时,先将行数为1或者列数为1的二维矩阵转换成一维向量,再参与运算;
只要遵守上述两点原则,矩阵相乘就不会出错。实现上述两点的语法如下:
① 向量转二维矩阵,采用newaxis:
import numpy as np
A=np.array([1,2,3]) #向量,shape=(3,),不能进行转置操作
print(A)
A=A[:,np.newaxis].T #二维数组,shape=(1,3),可以进行转置操作
print(A)运行结果如下:
[1 2 3]
[[1 2 3]]② 二维数组转向量,采用ravel()函数:
import numpy as np
A=np.array([[1,2,3]]) #二维数组,shape=(1,3),可以进行转置操作
print(A)
A=A.ravel() #向量,shape=(3,),不能进行转置操作
print(A)运行结果如下:
[[1 2 3]]
[1 2 3]4.1 对位乘积举例说明
对位乘积(点乘)前提条件:① 行数、列数都相等;② 行数或者列数其中之一相等。
① 场景1:二维矩阵.*二维矩阵,没有向量
import numpy as np
#------没有向量的场景,二维数组*二维数组-----#
A=np.array([[1,2],[4,5],[3,6]]) #行数为3,列数为2二维数组
B=np.array([[1,2],[1,2],[1,3]]) #行数为3,列数为2二维数组
C=np.array([[2,1]]) #行数为1,列数为2的二维数组
D=np.array([[3],[1],[2]]) #行数为3,列数为1的二维数组
print(f'A*B=A*B') #矩阵点乘
print(f'A*C=A*C') #行数不够,采用广播机制进行运算
print(f'A*D=A*D') #列数不够,采用广播机制进行运算运行结果如下:
A*B=[[ 1 4]
[ 4 10]
[ 3 18]]
A*C=[[2 2]
[8 5]
[6 6]]
A*D=[[ 3 6]
[ 4 5]
[ 6 12]]② 场景2:二维数组.*向量
import numpy as np
#------二维矩阵*向量-----#
A=np.array([[1,2],[4,5],[3,6]]) #二维数矩阵,shape=(3,2)
B=np.array([[1,2,3],[4,5,6]]) #二维矩阵,shape=(2,3)
C=np.array([2,1,2]) #向量,shape=(3,)
C=C[:,np.newaxis] #将C从向量变成二维数组,shape=(3,1)
print(f'A*C=A*C') #A的行数等于C的行数,广播机制
print(f'B*C.T=B*C.T') #B的列数等于C.T的列数,广播机制运行结果如下:
A*C=[[ 2 4]
[ 4 5]
[ 6 12]]
B*C.T=[[ 2 2 6]
[ 8 5 12]]4.2 矩阵乘法
矩阵乘法的前提条件:A×B,A的列数等于B的行数
① 场景1:二维矩阵×二维矩阵,没有向量
import numpy as np
#------二维矩阵×二维矩阵-----#
A=np.array([[1,2],[4,5],[3,6]]) #二维数组,shape=(3,2)
B=np.array([[1,2,3],[4,5,6]]) #二维矩阵,shape=(2,3)
C=np.array([[2,1]]) #二维矩阵,shape=(1,2)
print(f'A×B=A@B') #A的列数等于B的行数
print(f'A×C=A@C.T') #A的列数等于C.T的行数运行结果如下:
A×B=[[ 9 12 15]
[24 33 42]
[27 36 45]]
A×C=[[ 4]
[13]
[12]]② 场景2:二维矩阵×向量
#------二维矩阵×向量-----#
A=np.array([[1,2],[4,5],[3,6]]) #二维数组,shape=(3,2)
B=np.array([[1,2,3],[4,5,6]]) #二维矩阵,shape=(2,3)
C=np.array([2,1]) #向量,shape=(2,)
C=C[:,np.newaxis] #转换成二维矩阵,shape=(2,1)
print(f'A×C=A@C') #A的列数等于C的行数
print(f'B×C=B.T@C') #B.T的列数等于C的行数运行结果如下:
A×C=[[ 4]
[13]
[12]]
B×C=[[ 6]
[ 9]
[12]]4.3 向量内积
向量乘积的前提条件是向量的长度相等。
① 场景1:向量×向量
import numpy as np
#----向量×向量
A=np.array([1,2,3]) #向量,shape=(3,)
B=np.array([2,3,1]) #向量,shape=(3,)
print(A@B)
print(A@B.T)
print(A.T@B)
print(A.T@B.T)运行结果:
11
11
11
11可以看出,Python里面向量没有转置的概念。
② 向量×二维数组
import numpy as np
#----向量×二维数组
A=np.array([1,2,3]) #向量,shape=(3,)
B=np.array([[2,3,1]]) #二维数组,shape=(3,1)
B=B.ravel() #二维数组转换成向量,shape=(3,)
print(A@B)
print(A@B.T)
print(A.T@B)
print(A.T@B.T)运行结果:
11
11
11
11如果不将二维数组转换成向量,后面的程序会报错。
广播机制参考链接:
python的广播机制详解_liming89的博客-CSDN博客_python广播机制
python Numpy库相关矩阵运算
参考资料:https://www.cnblogs.com/ningskyer/articles/7607457.html
1. 定义向量和矩阵
在numpy中既可以使用ndarray类型,也可以使用matrix类型表示矩阵,经查阅资料发现一般不使用matrix类型,因为很多其他的库使用Numpy时基本都是使用ndarray(n维向量)类型的,如果使用matrix类型可能之后使用例如panda或scipy等计算库时会出现问题,因此这里统一使用ndarray进行定义向量和矩阵。
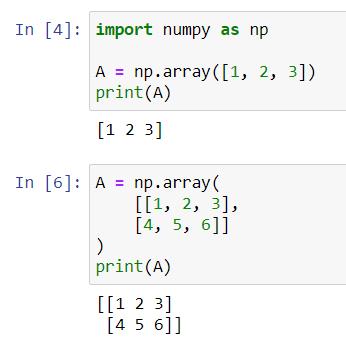
定义向量和矩阵的方法一般是使用array()这个方法创建ndarray,示例如下:
import numpy as np
# 创建向量
A = np.array([1, 2, 3])
# 创建矩阵,这里是 2*3 的矩阵
A = np.array(
[[1, 2, 3],
[4, 5, 6]]
)
2. 创建特殊的矩阵或向量
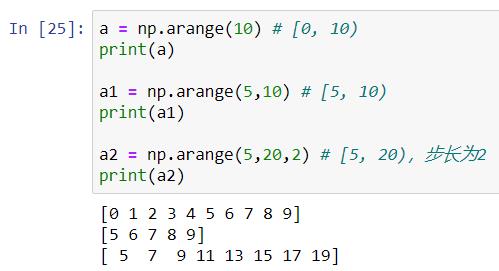
2.1 arange方法
创建等差数列向量:
2.2 linspace方法
也是创建一个等差数列向量,但是这个api是给定一个范围[a, b]和元素数进行生成的,往往使用这个方法创建一个范围的密集点,进而使用函数f(x)映射到点上,进而可以得到这个函数的图像。
使用案例:

2.3 logspace方法
和linspace类似,不过这个方法是用于生成等比数列的,参数如下:
- 起始点:10^x
- 终点:10^y
- 点的总数
案例:

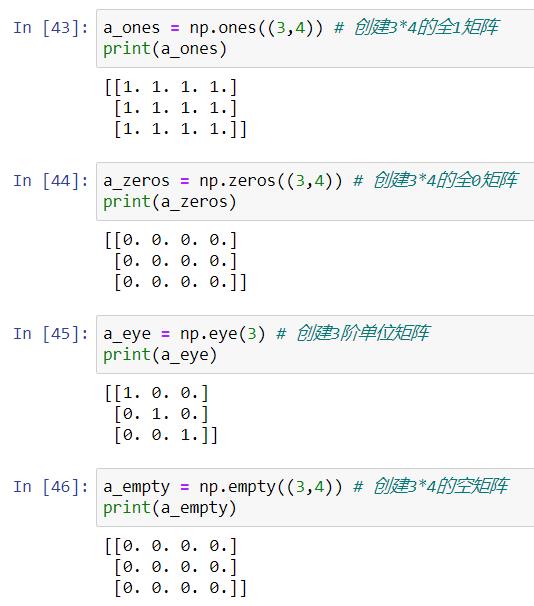
2.4 ones、zeros、eye、empty
- ones:全1的矩阵
- zeros:全零矩阵
- eye:单位矩阵
- empty:空矩阵
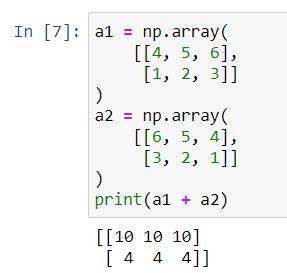
3. 加减乘除运算
普通的+-*/运算符放到矩阵或向量运算中代表矩阵中的各个元素分别进行运算,例如:
4. 矩阵相乘
4.1 矩阵和矩阵相乘
前面已经说到直接使用*运算符仅仅代表两个矩阵的对应元素相乘,实现矩阵乘法需要使用以下方法:
法一:面向过程方法dot:
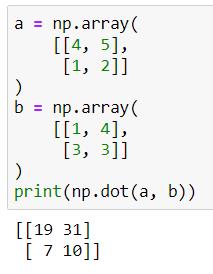
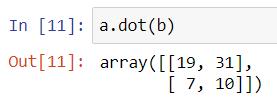
法二:ndarray对象成员方法dot:
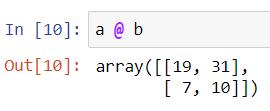
法三:使用@运算符:
这个运算符在numpy中代表进行矩阵乘法运算:
4.2 矩阵和向量相乘
和上面相同,使用上述的三个方法都可以:
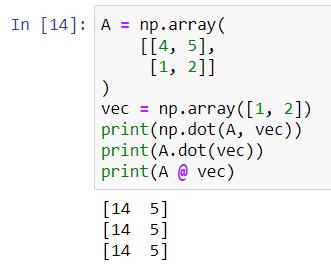
所表达的意思是:
4.3 行向量与列向量相乘
在两个向量进行相乘时,numpy就自动会将第一个向量作为行向量,第二个向量作为列向量进行运算了,例如:
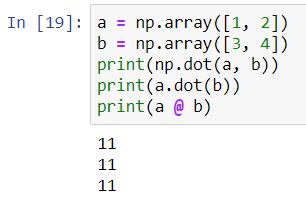
所表达的意思是:
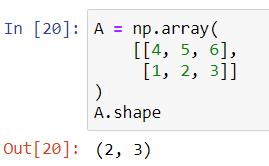
5. 获取矩阵行列数
使用ndarray成员属性shape:
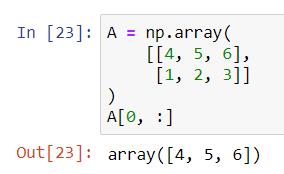
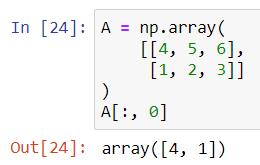
6. 截取矩阵
按行截取
按列截取
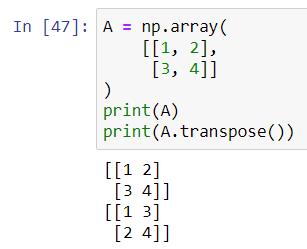
7. 矩阵转置
法一:transpose成员方法
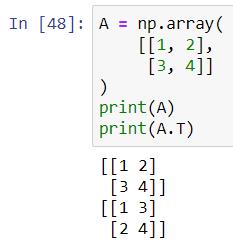
法二:T属性
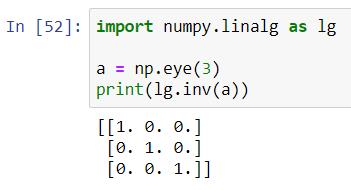
8. 矩阵求逆
首先需要导入numpy的子模块linalg:
import numpy.linalg as lg
然后使用该模块的inv方法求得矩阵的逆:
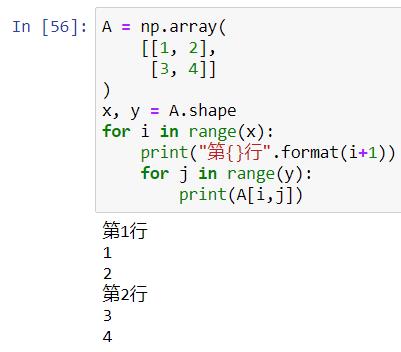
9. 矩阵遍历和修改元素值
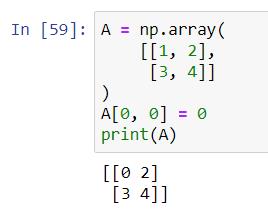
可以将矩阵作为二维数组操作,即使用a[i, j]取出第i行第j列的值:
同理,修改值也可以使用类似的方法,使用a[i, j]找到相应的元素后赋值:
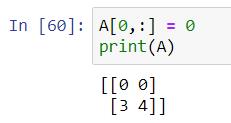
可以使用[x, :]来给整行赋值:
以上是关于Python矩阵相乘的主要内容,如果未能解决你的问题,请参考以下文章