RK3588(自带NPU)的环境搭建和体验
Posted 紫川宁520
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RK3588(自带NPU)的环境搭建和体验相关的知识,希望对你有一定的参考价值。
前言:这是本系列文章的第一篇,这里介绍一些必要的环境和工具,后面的文章不再介绍。
工具:i7-6700四核八线程、GTX960M显卡的渣渣笔记本(16G内存 + 512G固态 +1T机械)、Ubuntu18.04(VMware虚拟机安装,8G + 200G) 、一块RK3588S开发板,USB type-c线、12v电源线、一杯咖啡。
一、开发板简介
rk3588是瑞芯微2022.3.4日发布的一款八核64位处理器,采用8nm,主频2.4GHZ, 集成ARM Mali-G610 MP4四核GPU,内置NPU(重点),可提供6Tops算力,最大支持32G内存。支持8K视频编解码,支持NVMe SSD固态扩展。如图(网上找到的图,侵删)
对于本系列的博文来说,最重要的是自带的NPU。

详细数据可以去官网查看。
二、安装开发环境
环境安装的比较多,主要是python相关的依赖包和RKNN-Toolkit2.
1. 安装python3.6和pip3
sudo apt-get install python3 python3-dev python3-pip2. 安装依赖
sudo apt-get install libxslt1-dev zlib1g zlib1g-dev libglib2.0-0 libsm6 \\
libgl1-mesa-glx libprotobuf-dev gcc3.安装RKNN-Toolkit2安装包
1)安装python依赖(安装之前最好更新下pip3,我后面遇到了问题就是更新之后才解决的,下面的博文中谈到)
numpy==1.16.6
onnx==1.7.0
onnxoptimizer==0.1.0
onnxruntime==1.6.0
tensorflow==1.14.0
tensorboard==1.14.0
protobuf==3.12.0
torch==1.6.0
torchvision==0.7.0
psutil==5.6.2
ruamel.yaml==0.15.81
scipy==1.2.1
tqdm==4.27.0
requests==2.21.0
opencv-python==4.4.0.46
PuLP==2.4
scikit_image==0.17.2
bfloat16==1.1
flatbuffers==1.122)安装RKNN-Toolkit2
sudo pip3 install rknn_toolkit2-1.3.0_11912b58-cp36-cp36m-linux_x86_64.whl3)检查RKNN-Toolkit2是否安装成功

已安装成功。
三、在rk3588s上测试
测试rk3588s,需要使用usb线连接开发板和电脑,之后通过adb进行操作。
1. 查看设备

可以看到设备ID为ff3c685cc52f4821,这个ID在python脚本里面设置NPU时用到。
2. 更新板子的rknn_server 和librknnrt.so
librknnrt.so: 是一个板端的runtime 库。
rknn_server: 是一个运行在板子上的后台代理服务,用于接收PC 通过USB 传输过来的协议,
然后执行板端runtime 对应的接口,并返回结果给PC。
这两个文件只需要更新一次。之后直接连接usb线,在python里面配置就行。
adb root
adb remount
adb push \\
rknn_server \\
/vendor/bin/
adb push \\
librknnrt.so /vendor/lib64/
adb shell
chmod +x /vendor/bin/rknn_server
sync
reboot 3. 使用脚本进行测试
到这里,环境已经配置好了,下面使用自带的YOLOV5算法进行测试。
python3.6 test.py输出的日志比较多,大概就是,先初始化RKNN的环境,连接NPU,将yolov5生成的模型(onnx类型的文件)转化为rknn模型(瑞芯微NPU专用的模型文件),进行识别,将结果写入到图片中。
这里只截取其中一部分输出结果进行说明。
1)连接NPU

这一部分可以看到芯片的型号,通过adb连接rk3588。能成功连接。
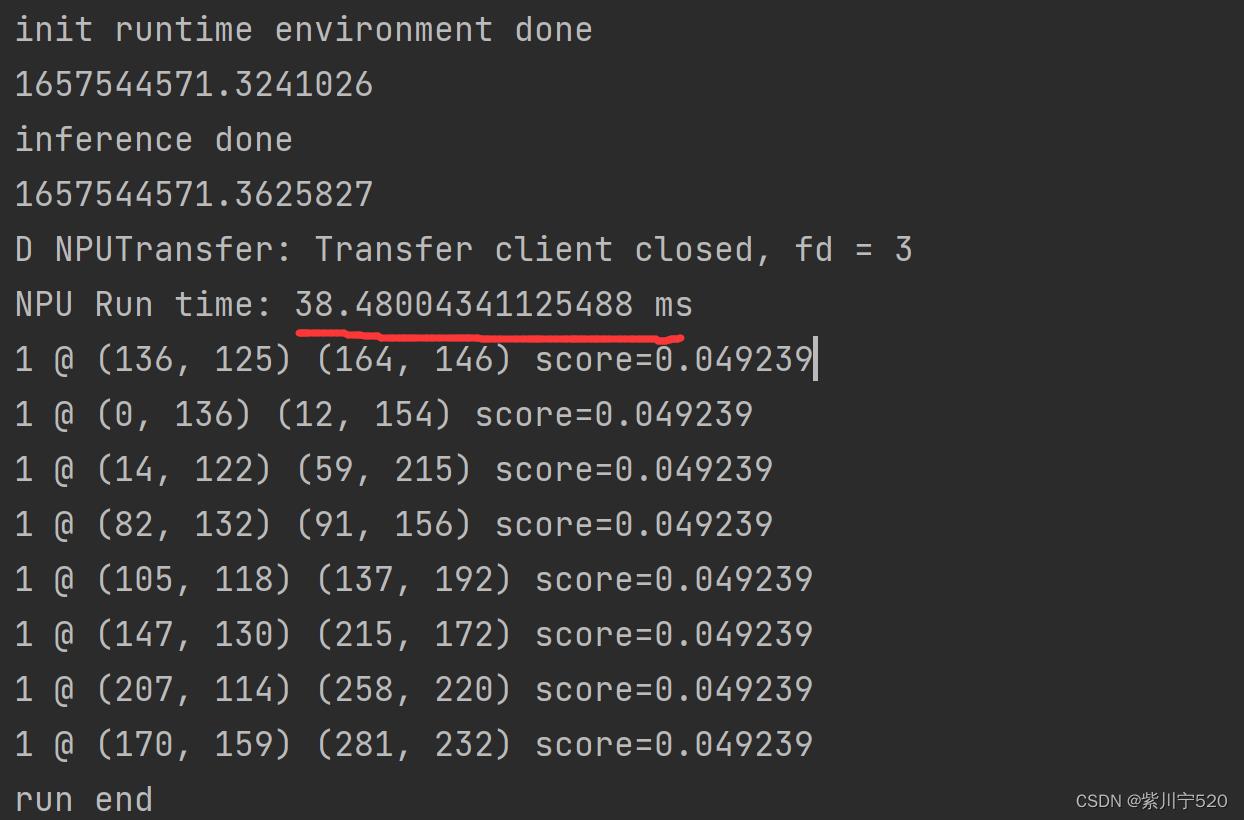
2)识别结果

这一部分时将识别出来的结果输出出来,就是识别的目标类别、坐标、尺寸、概率大小等。
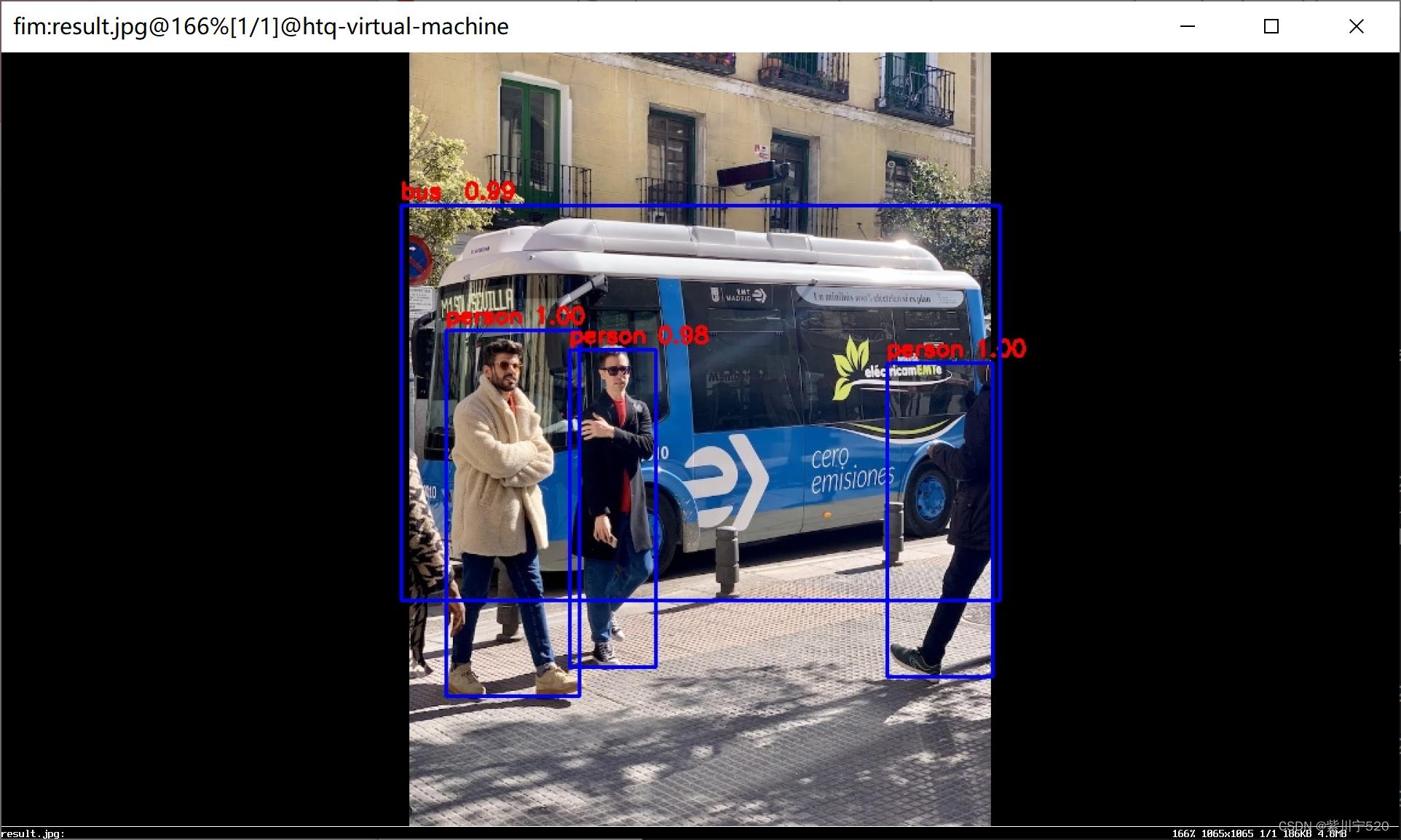
3)结果图像
将结果图像通过fim打开,可以看到,已经在图像上进行标注了。
四、安装环境是遇到问题
1. protobuf requires Python '>=3.7' but the running Python is 3.6.9
解决办法:更新pip之后重新安装tensorflow
更新指令:python3.6 -m pip install --upgrade pip3
2.No matching distribution found for onnxruntime==1.6.0

原因:onnxruntime找不到版本,可以去网上下载一个。
安装:pip3 install onnxruntime-1.6.0-cp36-cp36m-linux_x86_64.whl
名字要将manylinx2014改成linux
我用的是这个版本,链接:

3. No matching distribution found for skbuild

解决办法:pip3 install -i https://pypi.tuna.tsinghua.edu.cn/simple scikit-build
4. adb root失败

原因:root未启动。
解决: 执行命令adb shell setprop persist.sys.root_access 3 ,再使用adb root
五、总结
环境的安装还算可以,按照资料里面走基本都能正常安装。晚上测试了一下,使用SSD算法转化的rknn模块,直接加载,进行推理(只有推理,NPU还可以训练、转化模型等),大概需要40ms左右。这是第一次使用NPU进行操作,可能出错,不一定对,也没有对芯片的主频进行固定,后面测试的时候,学习下怎么固定频率进行测试。后面还要继续学习。
以上是关于RK3588(自带NPU)的环境搭建和体验的主要内容,如果未能解决你的问题,请参考以下文章