41.Isaac教程--使用DOPE进行3D物体姿态估计
Posted 扫地的小何尚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了41.Isaac教程--使用DOPE进行3D物体姿态估计相关的知识,希望对你有一定的参考价值。
使用DOPE进行3D物体姿态估计
ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
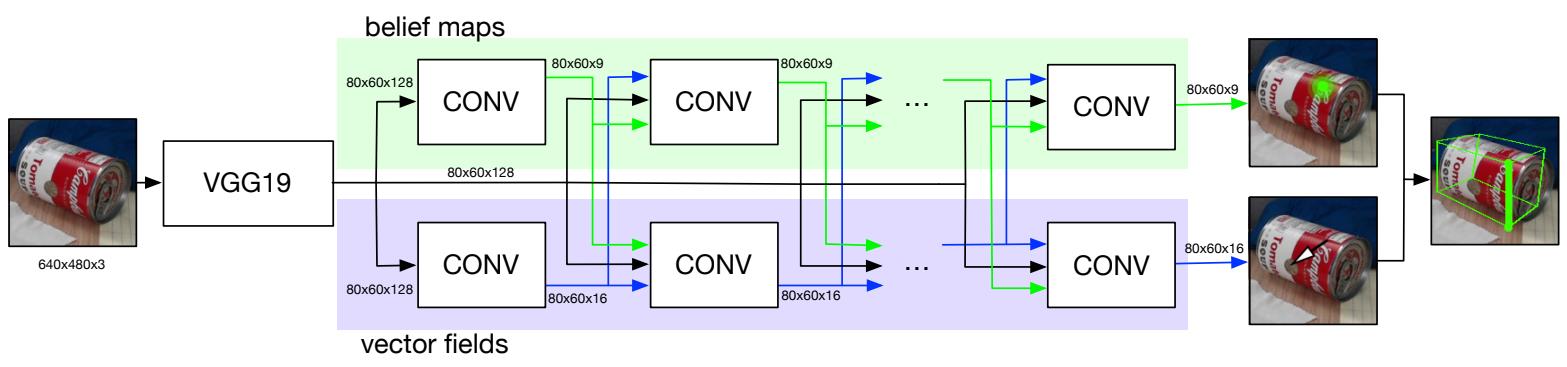
深度对象姿态估计 (DOPE:Deep Object Pose Estimation) 从单个 RGB 图像执行已知对象的检测和 3D 姿态估计。 它使用深度学习方法来预测对象 3D 边界框的角点和质心的图像关键点,并使用 PnP 后处理来估计 3D 姿态。 该算法不同于现有的Pose CNN模型; 因此,它为 Isaac SDK 中的 3D 姿势估计工具集提供了更多多样性。
推理
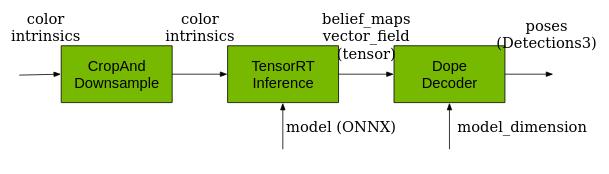
Isaac SDK 包支持使用 TensorRT 的 DOPE 推理和使用 DopeDecoder codelet 的 C++ 后处理。 每个 DOPE 网络模型都支持检测单个对象类的多个实例。
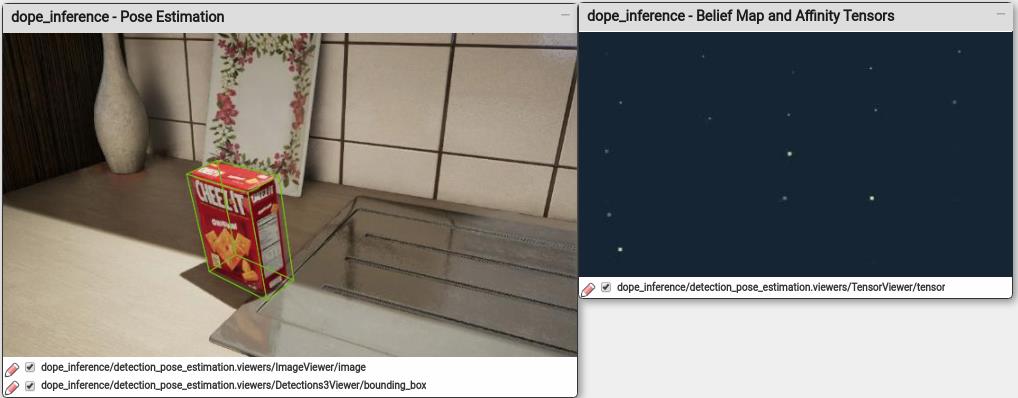
以下命令使用默认示例模型(在 OpenImages v4 上预训练 VGG19)和图像运行涂料推理应用程序以检测 YCB 对象破解器 (003_cracker):
bob@desktop:~/isaac/sdk$ bazel run packages/object_pose_estimation/apps/dope:dope_inference
在 localhost:3000 打开 Sight 以查看结果。
使用 Realsense 摄像头使用命令实时运行推理:
bob@desktop:~/isaac/sdk$ bazel run packages/object_pose_estimation/apps/dope:dope_inference -- --mode realsense
对其他 YCB 对象的推理
Deep_Object_Pose github 为额外的 YCB 对象提供预训练的 torch 模型(请注意,这些模型使用在 ImageNet 上预训练的 pytorch model zoo 中的 VGG19)。 要使用不同的模型运行推理应用程序,请将番茄汤 (YCB 005_tomator_soup_can) 的权重从 Deep_Object_Pose github 下载到 /tmp/soup_60.pth。 使用以下命令将torch模型转换为 ONNX 模型:
bob@desktop:~/isaac/sdk$ bazel run packages/object_pose_estimation/apps/dope:dope_model -- --input /tmp/soup_60.pth
这会在 /tmp/soup_60.onnx 中生成 ONNX 模型。 将推理应用程序与此模型结合使用:
bob@desktop:~/isaac/sdk$ bazel run packages/object_pose_estimation/apps/dope:dope_inference -- --mode realsense --model /tmp/soup_60.onnx --box 0.06766 0.102 0.0677 --label soup
请注意,新对象的 3D 边界框大小必须与 --box 一起提供,作为 DopeDecoder Codelet 执行 PnP 的输入。 YCB 模型的边界框大小可以在 Deep_Object_Pose 配置或 YCB 论文中找到。
训练
DOPE 训练目前不是 Isaac SDK 的一部分。 参考Deep_Object_Pose github scripts/train.py中的torch训练脚本。
对于托管在 Deep_Object_Pose github 上的任何预训练模型,或使用 Deep_Object_Pose github 中的训练脚本训练的模型,请使用:
bob@desktop:~/isaac/sdk$ bazel run packages/object_pose_estimation/apps/dope:dope_model -- --input <path to torch model>
将torch模型转换为 ONNX 模型以与 Isaac SDK 的 DOPE 推理管道一起使用。
要使用自定义对象进行训练,请参阅 Omniverse Isaac Sim 的合成数据生成工具。 FAT 数据集中指定了离线训练数据格式。
更多精彩内容:
https://www.nvidia.cn/gtc-global/?ncid=ref-dev-876561

以上是关于41.Isaac教程--使用DOPE进行3D物体姿态估计的主要内容,如果未能解决你的问题,请参考以下文章