使用Python,OpenCV对图像进行亚像素点检测,并拟合椭圆进行绘制
Posted 程序媛一枚~
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用Python,OpenCV对图像进行亚像素点检测,并拟合椭圆进行绘制相关的知识,希望对你有一定的参考价值。
这篇博客将介绍如何使用Python,OpenCV对图像进行亚像素检测,并对亚像素点进行椭圆拟合绘制。
1. 效果图
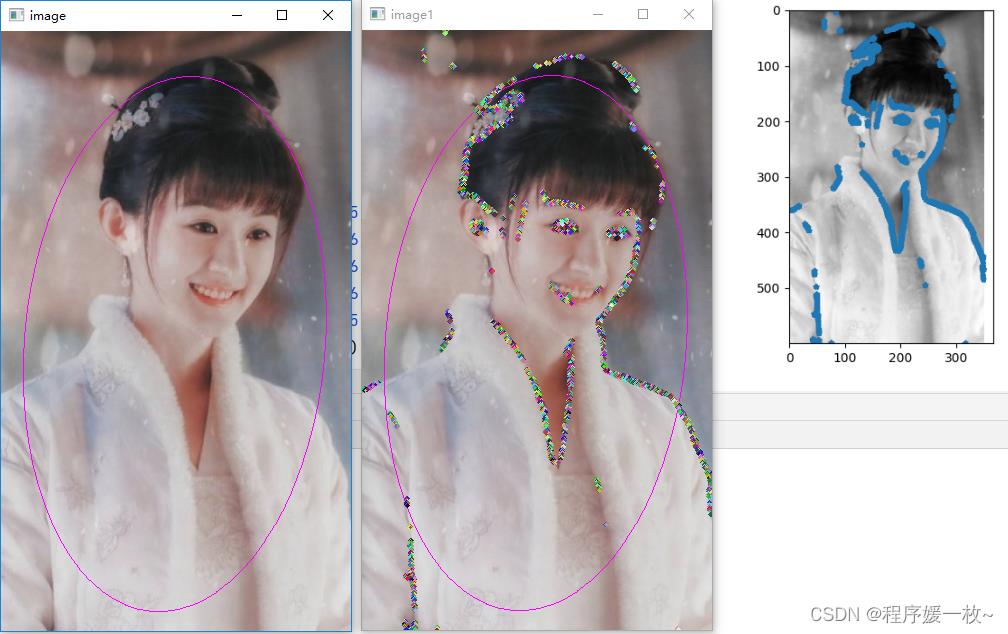
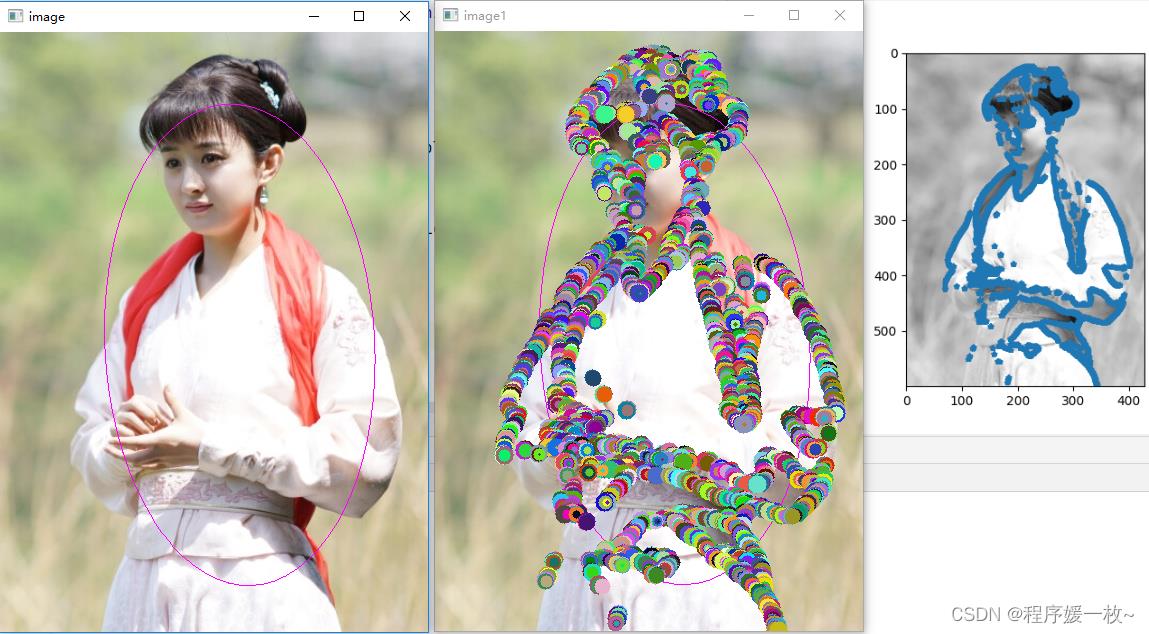
原始图上绘制拟合椭圆 VS 原始图上绘制拟合椭圆及亚像素点绘制随机半径及颜色的圆 VS 灰度图上绘制亚像素点效果图如下:
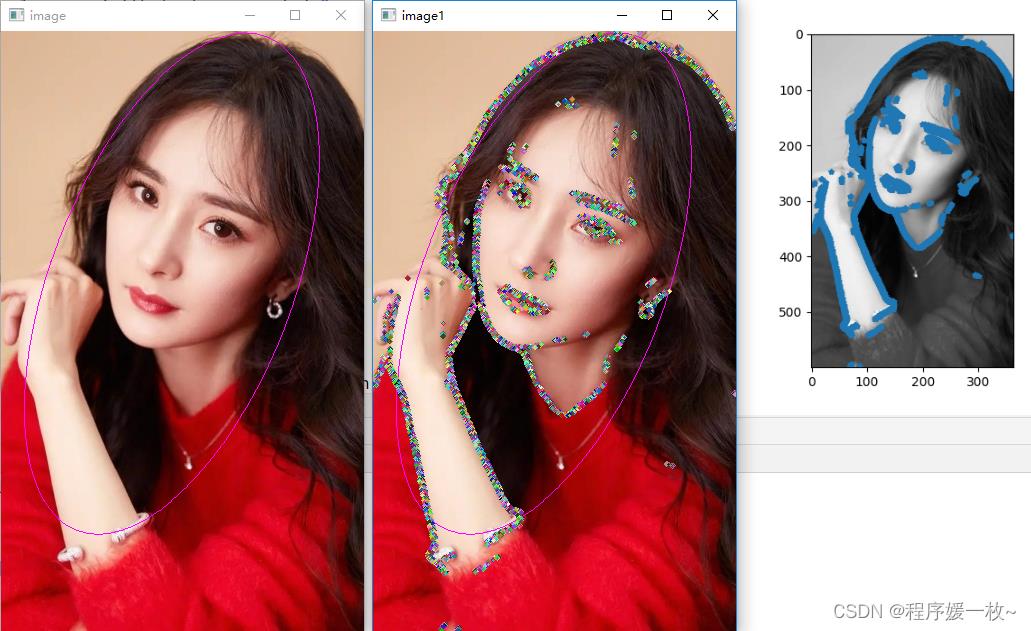
我喜欢的颖宝效果图2如下:
圆的随机半径放大一点效果图如下:
2. 源码
需要注意,绘制圆需要圆心都是int值
# 计算图像的亚像素点并绘制(matplotlib以及cv2),并对亚像素点进行3种椭圆方式拟合绘制
# python zernick_detection.py
import time
import cv2
import imutils
import matplotlib.pyplot as plt
import numpy as np
g_N = 7
M00 = np.array([0, 0.0287, 0.0686, 0.0807, 0.0686, 0.0287, 0,
0.0287, 0.0815, 0.0816, 0.0816, 0.0816, 0.0815, 0.0287,
0.0686, 0.0816, 0.0816, 0.0816, 0.0816, 0.0816, 0.0686,
0.0807, 0.0816, 0.0816, 0.0816, 0.0816, 0.0816, 0.0807,
0.0686, 0.0816, 0.0816, 0.0816, 0.0816, 0.0816, 0.0686,
0.0287, 0.0815, 0.0816, 0.0816, 0.0816, 0.0815, 0.0287,
0, 0.0287, 0.0686, 0.0807, 0.0686, 0.0287, 0]).reshape((7, 7))
M11R = np.array([0, -0.015, -0.019, 0, 0.019, 0.015, 0,
-0.0224, -0.0466, -0.0233, 0, 0.0233, 0.0466, 0.0224,
-0.0573, -0.0466, -0.0233, 0, 0.0233, 0.0466, 0.0573,
-0.069, -0.0466, -0.0233, 0, 0.0233, 0.0466, 0.069,
-0.0573, -0.0466, -0.0233, 0, 0.0233, 0.0466, 0.0573,
-0.0224, -0.0466, -0.0233, 0, 0.0233, 0.0466, 0.0224,
0, -0.015, -0.019, 0, 0.019, 0.015, 0]).reshape((7, 7))
M11I = np.array([0, -0.0224, -0.0573, -0.069, -0.0573, -0.0224, 0,
-0.015, -0.0466, -0.0466, -0.0466, -0.0466, -0.0466, -0.015,
-0.019, -0.0233, -0.0233, -0.0233, -0.0233, -0.0233, -0.019,
0, 0, 0, 0, 0, 0, 0,
0.019, 0.0233, 0.0233, 0.0233, 0.0233, 0.0233, 0.019,
0.015, 0.0466, 0.0466, 0.0466, 0.0466, 0.0466, 0.015,
0, 0.0224, 0.0573, 0.069, 0.0573, 0.0224, 0]).reshape((7, 7))
M20 = np.array([0, 0.0225, 0.0394, 0.0396, 0.0394, 0.0225, 0,
0.0225, 0.0271, -0.0128, -0.0261, -0.0128, 0.0271, 0.0225,
0.0394, -0.0128, -0.0528, -0.0661, -0.0528, -0.0128, 0.0394,
0.0396, -0.0261, -0.0661, -0.0794, -0.0661, -0.0261, 0.0396,
0.0394, -0.0128, -0.0528, -0.0661, -0.0528, -0.0128, 0.0394,
0.0225, 0.0271, -0.0128, -0.0261, -0.0128, 0.0271, 0.0225,
0, 0.0225, 0.0394, 0.0396, 0.0394, 0.0225, 0]).reshape((7, 7))
M31R = np.array([0, -0.0103, -0.0073, 0, 0.0073, 0.0103, 0,
-0.0153, -0.0018, 0.0162, 0, -0.0162, 0.0018, 0.0153,
-0.0223, 0.0324, 0.0333, 0, -0.0333, -0.0324, 0.0223,
-0.0190, 0.0438, 0.0390, 0, -0.0390, -0.0438, 0.0190,
-0.0223, 0.0324, 0.0333, 0, -0.0333, -0.0324, 0.0223,
-0.0153, -0.0018, 0.0162, 0, -0.0162, 0.0018, 0.0153,
0, -0.0103, -0.0073, 0, 0.0073, 0.0103, 0]).reshape(7, 7)
M31I = np.array([0, -0.0153, -0.0223, -0.019, -0.0223, -0.0153, 0,
-0.0103, -0.0018, 0.0324, 0.0438, 0.0324, -0.0018, -0.0103,
-0.0073, 0.0162, 0.0333, 0.039, 0.0333, 0.0162, -0.0073,
0, 0, 0, 0, 0, 0, 0,
0.0073, -0.0162, -0.0333, -0.039, -0.0333, -0.0162, 0.0073,
0.0103, 0.0018, -0.0324, -0.0438, -0.0324, 0.0018, 0.0103,
0, 0.0153, 0.0223, 0.0190, 0.0223, 0.0153, 0]).reshape(7, 7)
M40 = np.array([0, 0.013, 0.0056, -0.0018, 0.0056, 0.013, 0,
0.0130, -0.0186, -0.0323, -0.0239, -0.0323, -0.0186, 0.0130,
0.0056, -0.0323, 0.0125, 0.0406, 0.0125, -0.0323, 0.0056,
-0.0018, -0.0239, 0.0406, 0.0751, 0.0406, -0.0239, -0.0018,
0.0056, -0.0323, 0.0125, 0.0406, 0.0125, -0.0323, 0.0056,
0.0130, -0.0186, -0.0323, -0.0239, -0.0323, -0.0186, 0.0130,
0, 0.013, 0.0056, -0.0018, 0.0056, 0.013, 0]).reshape(7, 7)
def zernike_detection(path):
img = cv2.imread(path)
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur_img = cv2.medianBlur(img, 13)
c_img = cv2.adaptiveThreshold(blur_img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY_INV, 7, 4)
ZerImgM00 = cv2.filter2D(c_img, cv2.CV_64F, M00)
ZerImgM11R = cv2.filter2D(c_img, cv2.CV_64F, M11R)
ZerImgM11I = cv2.filter2D(c_img, cv2.CV_64F, M11I)
ZerImgM20 = cv2.filter2D(c_img, cv2.CV_64F, M20)
ZerImgM31R = cv2.filter2D(c_img, cv2.CV_64F, M31R)
ZerImgM31I = cv2.filter2D(c_img, cv2.CV_64F, M31I)
ZerImgM40 = cv2.filter2D(c_img, cv2.CV_64F, M40)
point_temporary_x = []
point_temporary_y = []
scatter_arr = cv2.findNonZero(ZerImgM00).reshape(-1, 2)
for idx in scatter_arr:
j, i = idx
theta_temporary = np.arctan2(ZerImgM31I[i][j], ZerImgM31R[i][j])
rotated_z11 = np.sin(theta_temporary) * ZerImgM11I[i][j] + np.cos(theta_temporary) * ZerImgM11R[i][j]
rotated_z31 = np.sin(theta_temporary) * ZerImgM31I[i][j] + np.cos(theta_temporary) * ZerImgM31R[i][j]
l_method1 = np.sqrt((5 * ZerImgM40[i][j] + 3 * ZerImgM20[i][j]) / (8 * ZerImgM20[i][j]))
l_method2 = np.sqrt((5 * rotated_z31 + rotated_z11) / (6 * rotated_z11))
l = (l_method1 + l_method2) / 2
k = 3 * rotated_z11 / (2 * (1 - l_method2 ** 2) ** 1.5)
# h = (ZerImgM00[i][j] - k * np.pi / 2 + k * np.arcsin(l_method2) + k * l_method2 * (1 - l_method2 ** 2) ** 0.5)
# / np.pi
k_value = 20.0
l_value = 2 ** 0.5 / g_N
absl = np.abs(l_method2 - l_method1)
if k >= k_value and absl <= l_value:
y = i + g_N * l * np.sin(theta_temporary) / 2
x = j + g_N * l * np.cos(theta_temporary) / 2
point_temporary_x.append(x)
point_temporary_y.append(y)
else:
continue
return point_temporary_x, point_temporary_y
image = cv2.imread('ml2.jpg')
path = 'ym_600.jpg'
cv2.imwrite(path, imutils.resize(image, height=600))
time1 = time.time()
point_temporary_x, point_temporary_y = zernike_detection(path)
time2 = time.time()
print(time2 - time1)
# gray : 进行检测的图像
gray = cv2.imread(path, 0)
plt.imshow(gray, cmap="gray")
# point检测出的亚像素点
point = np.array([point_temporary_x, point_temporary_y])
# s:调整显示点的大小
plt.scatter(point[0, :], point[1, :], s=10, marker="*")
plt.show()
def cv_fit_ellipse(points, flag=0):
# cv2.fitEllipse only can estimate int numpy 2D array data
p = np.array(points)
p = np.array(p).astype(int)
center0, axes0, angle0 = cv2.fitEllipse(p)
center1, axes1, angle1 = cv2.fitEllipseAMS(p)
center2, axes2, angle2 = cv2.fitEllipseDirect(p)
print(type(center0))
print("fitEllipse: " + str(np.array(center0)))
print("fitEllipseAMS: " + str(np.array(center1)))
print("fitEllipseDirect: " + str(np.array(center2)))
box = tuple([tuple(np.array(center0)), tuple(np.array(axes0)), angle0])
if flag == 0:
box = tuple([tuple(np.array(center0)), tuple(np.array(axes0)), angle0])
elif flag == 1:
box = tuple([tuple(np.array(center1)), tuple(np.array(axes1)), angle1])
else:
box = tuple([tuple(np.array(center0)), tuple(np.array(axes0)), angle0])
return box
points = np.array(list(zip(point_temporary_x, point_temporary_y)))
print(type(points), points[0], points.shape)
box1 = cv_fit_ellipse(points, flag=1)
image = cv2.imread(path)
cv2.ellipse(img=image, box=box1, color=(255, 0, 255), thickness=1)
cv2.imshow("image", image)
for i in points:
# 亚像素点绘制随机颜色半径圆
radius = np.random.randint(1, high=10)
color = np.random.randint(0, high=256, size=(3,)).tolist()
# print('radius: ', radius, type(radius))
# print('color: ', color, type(color))
cv2.circle(image, (int(i[0]), int(i[1])),以上是关于使用Python,OpenCV对图像进行亚像素点检测,并拟合椭圆进行绘制的主要内容,如果未能解决你的问题,请参考以下文章